
An Hệ thống nhúng là một trong những hạng mục dự án cá nhân lớn nhất, đặc biệt dành cho sinh viên kỹ thuật điện & điện tử. Các dự án IEEE trên Hệ thống nhúng có thể thay đổi từ các khái niệm tương đối đơn giản đến các dự án khá phức tạp. Ngoài ra với Dự án IEEE trên Hệ thống nhúng, có rất nhiều lựa chọn thay thế về kích thước & đặc điểm của bộ vi xử lý và vi điều khiển được sử dụng. Trong IEEE, chúng ta tìm hiểu về các bộ vi điều khiển khác nhau như- ARM, AVR, PIC 16/18, Coldfire, và một số bộ vi điều khiển khác phù hợp với một loại dự án cụ thể.
Các dự án IEEE mới nhất về hệ thống nhúng
Mới nhất các dự án sáng tạo nhúng được thảo luận dưới đây. Sau các dự án nhúng thú vị rất hữu ích cho sinh viên kỹ thuật.

Dự án IEEE trên hệ thống nhúng
- Bãi đậu xe tự động dựa trên Vision.
- Mô phỏng động đất và sóng thần qua mạng GSM
- Bộ điều khiển đèn giao thông thông minh sử dụng GSM
- Thiết kế và triển khai Hệ thống an ninh dựa trên cảm biến PIR
- Điều khiển Robot với cảnh báo bằng giọng nói và màn hình cảm ứng.
- Bộ điều khiển bảng điều khiển năng lượng mặt trời và tối ưu hóa điện năng
- Tự động hóa sân bay sử dụng GSM.
- Bộ chuyển đổi điện hai chiều cho xe đạp điện có tính năng sạc
- Nút cảm biến không dây để phát hiện đường ống dẫn khí nguy hiểm
- Robot chọn sách tự động cho thư viện
Bây giờ chúng ta hãy xem tầm quan trọng của các Dự án IEEE được liệt kê ở trên về Hệ thống nhúng một cách chi tiết như Giới thiệu, Mô tả, Phần cứng và Thành phần phần mềm.
Hệ thống đỗ xe tự động dựa trên tầm nhìn
Bãi đậu xe ô tô là một vấn đề lớn trong bối cảnh hiện nay, khi số lượng ô tô đang tăng lên từng ngày, mặt khác, chỗ đậu xe đang bị hạn chế. Rất nhiều thời gian bị lãng phí trong việc tìm kiếm một chỗ đậu xe. Dự án này mô tả một cách tiếp cận để chinh phục những hoàn cảnh này trong việc kiểm tra và quản lý chỗ đỗ xe bằng cách sử dụng hệ thống đỗ xe tự động dựa trên tầm nhìn.
Các thành phần phần cứng và phần mềm là
- Để xây dựng hệ thống tự động đậu xe ô tô này, chúng tôi đang sử dụng camera Web
- Máy tính cá nhân
- Đầu đọc RFID
- Thẻ RFID
- Động cơ bước
- Chìa khóa
- Man hinh LCD
- Cuối cùng nhưng không kém phần quan trọng nhất là Vi điều khiển ARM7
- Đèn LED
- Flash Magic
- DOTNET
- Trình biên dịch Keil
- Nhúng C
Sự miêu tả
Máy ảnh web được sử dụng sẽ cung cấp thông tin về dung lượng trống và dữ liệu này sẽ được lưu trữ trong PC. Màn hình LCD sẽ hiển thị thông tin với sự trợ giúp của bộ vi điều khiển được sử dụng. Khi một người đến bãi đậu xe, anh ta có thể tìm kiếm chỗ trống. Sau đó, PC sẽ gửi tất cả thông tin đến bộ vi điều khiển & bộ điều khiển sẽ gửi thông tin đến màn hình LCD, nơi người dùng có thể xem tính khả dụng. Nếu còn chỗ trống, cửa sẽ tự động mở hoặc nếu không, cửa sẽ vẫn đóng.
Mô phỏng động đất và sóng thần qua mạng GSM
Do động đất & sóng thần, một lượng lớn tàn phá xảy ra và dân số chết hàng năm. Những thiên tai này không bao giờ báo trước khi xảy ra. Để tránh sự tàn phá và chết chóc này, chúng tôi đang xây dựng một dự án sẽ cảnh báo công chúng về động đất, sóng thần, v.v. Mô phỏng thiên tai này sẽ được thực hiện với sự hỗ trợ của công nghệ GSM.
Các thành phần phần cứng và phần mềm là
- Bộ vi điều khiển –P89V51RD2
- GSM (Mô-đun hệ thống toàn cầu)
- Bộ chuyển đổi ADC / Analog sang Digital
- Gia tốc kế
- Buzzer
- Màn hình LCD
- Flash Magic
- Nhúng C
- Trình biên dịch Keil
Sự miêu tả
Hệ thống này tiếp tục theo dõi các rung động của trái đất gây ra tại mỗi & mỗi giây trong ngày, trong trường hợp rung động của trái đất vượt qua ngưỡng, hệ thống này sẽ tạo ra một tín hiệu, do đó cảnh báo cho công chúng. Khi trận động đất xảy ra, tín hiệu được tạo ra và gia tốc kế được kích thích và tín hiệu được truyền qua ADC tới Vi điều khiển. Các tín hiệu này được tạo ra càng sớm càng tốt. Do tín hiệu nhanh nên có khả năng báo động sai.
Nhưng trong dự án kích thích này, chúng tôi sử dụng 2 máy đo gia tốc đặt cách xa nhau từ hai đến ba mét. Khi bộ vi điều khiển nhận được các tín hiệu giống nhau từ cả hai gia tốc kế thì nó sẽ đưa ra một thông báo về thông tin Động đất. Khi hệ thống này phát hiện được cảnh báo về trận động đất, hệ thống này sẽ truyền các giá trị cường độ động đất rời rạc này đến một vị trí trung tâm bằng cách sử dụng công nghệ GSM. Dữ liệu này sau đó được hiển thị trên màn hình LCD. Tại cùng một cảnh báo, còi bắt đầu kêu.
Thiết kế bộ điều khiển đèn giao thông thông minh sử dụng hệ thống nhúng & GSM
Nói chung, việc kiểm soát đèn giao thông là bắt buộc đối với các thành phố có dân số đông như Delhi, Mumbai, Bangalore. Đôi khi ùn tắc kéo dài đến mức cảnh sát giao thông không thể nghe thấy tiếng còi của xe cấp cứu, do đó, xe cấp cứu phải chờ lâu & do đó bệnh nhân có thể xảy ra bất kỳ sai sót nào. Vì vậy, dự án này giúp chúng tôi chinh phục tình huống này.
Các thành phần phần cứng và phần mềm là
- Bộ vi điều khiển (trong số 8051 họ) - P89V51RD2
- Bộ so sánh LM358
- LCD 16X2
- Đèn LED đỏ và xanh lục
- Cảm biến hồng ngoại
- GSM
- Flash Magic
- Chụp Orcad
- Trình biên dịch Keil - C
Sự miêu tả
Để kiểm tra mật độ giao thông, chúng tôi đang sử dụng một số cảm biến IR trên lề đường & dựa trên thông tin được cung cấp bởi cảm biến IR & mật độ giao thông, đèn tín hiệu giao thông sẽ thay đổi. Cảm biến gửi tất cả thông tin đến một bộ so sánh để số hóa thông tin được cung cấp.

Bộ điều khiển đèn giao thông sử dụng Gsm & Hệ thống nhúng
Nếu cảm biến hồng ngoại đầu tiên bị chặn, tín hiệu giao thông sẽ hiển thị đèn xanh trong khoảng 10 giây, khi cảm biến hồng ngoại thứ hai bị tắc bởi giao thông, tín hiệu sẽ có màu xanh trong 15 giây và thời gian cũng được hiển thị trên màn hình LCD đi kèm. Trong trường hợp xe cấp cứu gần đó có bất kỳ tín hiệu nào trong tình huống khẩn cấp, thì màn hình LCD phải gửi thông tin số mặc định đến điểm trung tâm thông qua công nghệ GSM, kết quả là tín hiệu sẽ sớm có màu xanh trong khoảng 20 giây.
Thiết kế và triển khai Hệ thống an ninh dựa trên cảm biến hồng ngoại nhiệt điện
Những ngày này, an ninh của xe cộ, ngôi nhà và văn phòng của bạn là rất quan trọng. Do đó, dự án này được phát triển với một hệ thống bảo mật được kích hoạt với tính năng phát hiện chuyển động và mật khẩu. Bằng cách sử dụng công nghệ GSM, quản trị viên sẽ được cập nhật các chuyển động diễn ra trong cơ sở của bạn, thông tin này được chuyển tải với sự trợ giúp của SMS. Quản trị viên được phép thực hiện hành động từ bất cứ đâu, điều này giúp tiết kiệm thời gian trong trường hợp khẩn cấp.
Các thành phần phần cứng và phần mềm là
- Cảm biến PIR
- Buzzer
- Bộ giải mã và mã hóa DTMF
- Màn hình LCD chữ và số
- Bộ vi điều khiển - P89V51RD2
- Mô-đun GSM
- Chụp Orcad
- Trình biên dịch Keil
- Flash Magic
- Ngôn ngữ C được nhúng
Sự miêu tả
Dự án này được tạo ra bởi một hệ thống bảo mật chi phí thấp được kích hoạt với một cảm biến PIR nhỏ (Pyro Electro Infrared) được gắn vào Bộ vi điều khiển. Cảm biến PIR này sử dụng lợi ích của đa điện để cảm nhận cơ thể con người. Vì cơ thể con người là nguồn bức xạ hồng ngoại thụ động liên tục. Cơ chế của dự án phát hiện sự tồn tại của cơ thể người bằng các tín hiệu do cảm biến PIR tạo ra.
Trong trường hợp phát hiện một cá nhân bị nghi ngờ trong các khu vực hạn chế, hệ thống tạo ra một cảnh báo cảnh báo cùng với cuộc gọi đến một số được chỉ định bằng cách sử dụng modem GSM. Hệ thống này được kích hoạt với cảm biến khói để cảnh báo trong trường hợp hỏa hoạn. Cách tiếp cận cực kỳ nhạy bén này có một hạn chế tính toán nhỏ, do đó, nó phù hợp tốt với các ứng dụng được công nghiệp hóa và môi trường xung quanh thông minh. Bộ vi điều khiển được sử dụng trong hệ thống kiểm soát toàn bộ cơ chế của dự án và do đó được coi là trái tim của dự án.
Điều khiển robot dựa trên màn hình cảm ứng với Cảnh báo bằng giọng nói
Trong tốc độ phát triển công nghệ hiện nay, điều khiển từ xa đóng vai trò rất quan trọng đối với việc tự động hóa các sản phẩm công nghiệp và người dùng cũng như các ứng dụng SPACE hoặc Defense. XBEE là một yếu tố thiết yếu đóng vai trò cơ bản ở đây. Một điều khiển từ xa không dây tự động được tích hợp vào Máy vi tính phác thảo các khối cấu trúc cốt lõi của cơ chế bảo mật không dây thay thế công nghệ dây cũ.
Các thành phần phần cứng và phần mềm là
- ZIGBEE
- Đơn vị thoại
- Động cơ DC
- Bộ vi điều khiển - P89V51RD2
- Trình điều khiển động cơ DC
- Màn hình cảm ứng
- Nguồn cấp
- Bánh xe
- Trình biên dịch Keil
- Nhúng C
- Flash Magic
Sự miêu tả
Dự án điều khiển robot màn hình cảm ứng với cảnh báo bằng giọng nói này sẽ phát huy tác dụng của vi điều khiển P89V51RD2. Nhiệm vụ này là tốt nhất trong lĩnh vực thuốc. Máy phát này được đặt gần bệnh nhân và bệnh nhân sử dụng robot để di chuyển và gửi thông tin cho bác sĩ bằng cách sử dụng màn hình cảm ứng. Trong những tình huống bệnh nhân không liên lạc được với bác sĩ, lúc này bệnh nhân sẽ gửi tất cả thông tin của mình bằng robot.
Bệnh nhân di chuyển robot sang trái, phải, tiến & lùi với sự trợ giúp của bàn phím màn hình cảm ứng. Trong bàn phím, một tin nhắn thoại được xác định trước sẽ được nhập vào mỗi phím và khi bệnh nhân bấm phím, một tin nhắn đã nhập trước sẽ được đưa cho bác sĩ. Bây giờ bác sĩ có thể hành động theo thông tin được cung cấp. Robot được kết hợp với bộ thu. Ở đây chúng tôi đang giao tiếp với sự trợ giúp của Xbee.
Bộ điều khiển bảng điều khiển năng lượng mặt trời một trục và tối ưu hóa điện năng
Nói chung, tất cả các bảng điều khiển năng lượng mặt trời thông thường được đối mặt về một phía hoặc một hướng. Do đó, bảng điều khiển năng lượng mặt trời không nhận được đầy đủ tia nắng mặt trời để hoạt động hiệu quả. Dự án Bảng điều khiển năng lượng mặt trời một trục này chỉ nhằm mục đích khắc phục sự kém hiệu quả này của các tấm pin mặt trời. Dự án này sẽ phát huy công nghệ LDR giúp tấm pin mặt trời thu được tia nắng từ mọi hướng.
Các thành phần phần cứng và phần mềm là
- LDR's
- Vi điều khiển 8051 P89V51RD2
- Chuyển tiếp
- Bảng điều khiển dẫn
- Bảng điều khiển năng lượng mặt trời
- Động cơ bước
- Flash Magic
- Ngôn ngữ C nhúng
- Trình biên dịch Keil
Sự miêu tả
Dự án này được thiết kế với mục đích có được khả năng điều khiển tự động đối với bảng điều khiển năng lượng mặt trời, giúp thu được các tia nắng mặt trời hoàn chỉnh từ mọi hướng. Điều này đạt được bằng cách cung cấp giá trị chuyển động hoặc quay cho bảng điều khiển năng lượng mặt trời. Mặt trời mọc ở phía đông và lặn ở phía tây, do đó trong một bảng năng lượng mặt trời thông thường, các tia mặt trời thu thập được là từ đầu đông hoặc đầu tây, vì vậy để khắc phục điều này, một công suất quay được cung cấp để các tia được thu thập từ phía đông và tây cả hai.

Bảng điều khiển năng lượng mặt trời một trục
Năng lượng quay được cung cấp cho bảng điều khiển bằng cách sử dụng động cơ bước. 5 LDR được đặt ở vòm và tùy thuộc vào cường độ của LDR, động cơ bước sẽ quay. Cường độ của LDR sẽ ít hơn khi cường độ ánh nắng nhiều hơn bằng cách sử dụng nguyên tắc này, nó sẽ hoạt động.
LDR cũng sẽ tối ưu hóa công suất nguồn. ADC sẽ hiển thị tất cả các bài đọc do LDR đưa ra và kết quả đọc này sẽ được chuyển đến vi điều khiển của 8051 các gia đình. Theo kết quả đọc của ADC, bộ vi điều khiển với sự trợ giúp của rơ le sẽ phát sáng đèn LED. Nếu công suất phát sáng nhiều hơn thì có nghĩa là tất cả các dãy đèn LED sẽ bị TẮT. Theo cường độ của dòng đèn LED phát sáng sẽ được BẬT hoặc TẮT. Trong dự án này, vi điều khiển là trái tim của hệ thống hoàn chỉnh.
Tự động hóa sân bay dựa trên GSM
Dự án dựa trên GSM này được sử dụng trong các Sân bay. Vào thời điểm khởi hành của các chuyến bay, một số điều bạn phải lưu ý như - Thu dọn hành lý, thông quan đường băng, v.v ... Tùy thuộc vào tất cả các khía cạnh này, chúng tôi đã lên kế hoạch cho dự án Sân bay này.
Các thành phần phần cứng và phần mềm là
- Mô-đun GPS
- Động cơ DC
- Đèn LED
- Cảm biến chướng ngại vật hồng ngoại
- Máy thu và máy phát hồng ngoại
- Trình điều khiển động cơ DC L293D
- LCD chữ và số 16 × 2
- Vi điều khiển AT89C52
- Chụp Orcad
- HyperTerminal
- Nhúng C
- Flash Magic
- Trình biên dịch Keil
Sự miêu tả
Trong tình huống hiện tại khi hạ cánh bất kỳ máy bay nào, một xác nhận bằng giọng nói sẽ được gửi từ Kiểm soát viên không lưu (ATC) tới phi công. Sau khi hạ cánh máy bay được hộ tống đến bãi đậu, nơi hành khách được phép ra và lấy hành lý của họ. Tất cả các thiết bị sử dụng trong phòng chờ đều được truy cập thủ công và điều này dẫn đến sự lãng phí năng lượng cũng như thời gian. Có nhiều khả năng xảy ra tai nạn cũng như do lỗi của con người.
Trong dự án này, chúng tôi kiểm tra đường băng trước khi hạ cánh, đối với điều này, chúng tôi đã đặt bộ thu IR & bộ phát IR đối diện nhau ở cả hai phía của đường băng. Phi công được yêu cầu gửi tin nhắn hạ cánh đến trạm gốc. Nếu đường băng tự do đến trạm gốc sẽ gửi tin nhắn hạ cánh cho phi công bằng công nghệ GSM. Trong nhiệm vụ hạ cánh của máy bay được hiển thị bằng đèn LED (mục đích demo).
Sau khi các thang cuốn hạ cánh được gửi cho việc này, chúng tôi sử dụng động cơ DC (Mục đích demo). Chúng tôi cũng đang đặt một cảm biến chướng ngại vật hồng ngoại, cảm biến này sẽ dẫn hành lý trên đai khi nó đến gần cảm biến cho chúng tôi (mục đích demo) sử dụng động cơ DC. Để đạt được thành công trong dự án này, một bộ vi điều khiển của họ 8051 được sử dụng.
Thiết kế và triển khai bộ chuyển đổi điện hai chiều cho xe đạp điện có tính năng sạc
Trong thời gian gần đây, để đáp ứng các yêu cầu tiết kiệm năng lượng, giảm thiểu carbon và an toàn sinh thái, tất cả các bánh răng và năng lượng điện tử được yêu cầu để đáp ứng nhu cầu xanh. Mặt khác, các phương tiện sử dụng nhiên liệu dầu khổng lồ gây ô nhiễm không khí nghiêm trọng và hủy hoại môi trường. Do đó, việc tạo ra EV (xe điện) hoặc HEV (xe điện hybrid) đang phát triển thành một vấn đề quan trọng ở nhiều quốc gia. Pin phụ là nguồn năng lượng chính cho các Xe điện này. Do đó, quản lý năng lượng là một khía cạnh then chốt quan trọng của thiết kế xe điện hybrid hoặc xe điện.
Các thành phần phần cứng và phần mềm là
- Buck của tăng
- Chia điện áp
- LCD
- Mạch sạc
- Ắc quy-12V
- Buck của tăng
- PIC18F458
- Bộ PIC - Vi mạch
- MPLAB
- HOẶC-CAD
Sự miêu tả
Trong dự án này về bộ chuyển đổi năng lượng hai chiều cho xe đạp điện, chúng tôi chạy một máy sử dụng bộ điều khiển động cơ được kích hoạt bởi bộ vi điều khiển. Máy đó được gắn bởi một động cơ nữa. Nhờ sự kết hợp, động cơ khác thay phiên nhau và tạo ra EMF trở lại. EMF phía sau được tạo ra này được khuếch đại và sử dụng để sạc pin.
Ở đây sử dụng một trình điều khiển động cơ được kích hoạt bởi bộ vi điều khiển. Động cơ gắn liền di chuyển khi động cơ sơ cấp di chuyển nên việc sản xuất EMF trở lại được bắt đầu bất cứ khi nào máy chuyển động. EMF phía sau được sản xuất như vậy được sử dụng để tăng cường khối trong đó khối tăng tiến EMF phía sau thành 12Volts và pin được cấp nguồn tương tự.
Để hiển thị các điện áp được tạo ra bởi pin và EMF trở lại, một màn hình LCD được sử dụng. Điện áp pin ngoài EMF trở lại sẽ cao hơn để cung cấp cho bộ vi điều khiển vì vậy một bộ phân tách điện áp được sử dụng để chia điện áp cho 10 sẽ phù hợp hơn để tính toán.
Nút cảm biến không dây để phát hiện đường ống dẫn khí độc hại
Dự án này giải thích các khía cạnh hoạt động và hiệu suất của nút cảm biến không dây dựa trên ARM7 trong việc quan sát các thông số như CO2, độ ẩm và nhiệt độ xung quanh đường ống. Để phát hiện bất kỳ sự thay đổi nào trong các thông số này, hệ thống này được sử dụng. Hệ thống này sử dụng cảm biến nút không dây hoạt động bằng pin được kết nối với các cảm biến bên ngoài khác để đánh giá các thông số.
Các thành phần phần cứng và phần mềm là
- Zigbee
- Cảm biến CO2
- LCD
- Vi điều khiển
- Cảm biến nhiệt độ và độ ẩm
- Chụp Orcad
- Hyperterminal
- Nhúng C
- Flash Magic
- Trình biên dịch Keil
Sự miêu tả
Dự án này hoạt động với một vi điều khiển ARM7, ngưỡng được nhập với mức tham số xác định trước. Các cảm biến được sử dụng cho đầu ra vôn tương tự. Đầu ra này được cung cấp cho ADC sẽ chuyển đổi đầu ra tương tự sang kỹ thuật số. Đầu ra kỹ thuật số này được đánh giá trong Vi điều khiển.
Nếu độ ẩm, nhiệt độ và các thông số khác không khớp hoặc vượt quá mức xác định trước, nó sẽ gửi thông tin đến nơi giám sát với sự trợ giúp của công nghệ Zigbee. Tất cả các mức thông số được phát hiện như độ ẩm, nhiệt độ, v.v. sẽ được hiển thị trên màn hình LCD được sử dụng.
Robot chọn sách tự động cho thư viện
Để làm cho hệ thống thư viện tự động, dự án này đã được lên kế hoạch. Để sử dụng quy trình tìm kiếm sách trong thư viện này, chúng tôi sử dụng Cánh tay Robot với một số quyền tự do, điều này sẽ hỗ trợ việc tìm ra chính xác cuốn sách cần thiết.
Các thành phần phần cứng và phần mềm là
- LCD
- Vi điều khiển
- Zigbee
- Nguồn cấp
- Người điều khiển động cơ
- Thẻ & đầu đọc RFID
- Cảm biến hồng ngoại
- Phép thuật chớp nhoáng
- cái nêm
Sự miêu tả
Trong dự án này, tất cả sách sẽ được gắn thẻ bằng thẻ RFID và trình đọc thẻ được bật trong rô bốt. Robot sẽ thực hiện một cách lực lượng con thú để tìm kiếm và trong trường hợp cuốn sách được định vị, cánh tay robot sẽ được hạ xuống cho đến khi cảm biến chướng ngại vật hồng ngoại nằm trong Cánh tay tìm thấy cuốn sách.

Robot nhặt sách
Sau đó, cánh tay rô bốt sẽ dùng hàm kẹp chặt cuốn sách và sau đó rô bốt sẽ di chuyển theo hướng ngược lại để đặt cuốn sách vào nơi nó bắt đầu. Công nghệ tương tự có thể được áp dụng trong các siêu thị.
Danh sách một số dự án IEEE khác về hệ thống nhúng cho học sinh ECE được thảo luận dưới đây.
Robot tự cân bằng với bánh xe kép tự động sử dụng vi điều khiển
Chức năng chính của robot tự cân bằng với hai bánh xe này là cân bằng vị trí của nó trong khu vực của một vị trí cố định. Ban đầu, hệ thống này không ổn định và phi tuyến tính. Khi cấu trúc vật lý của hệ thống này được thay đổi bằng cách sử dụng bộ điều khiển PID thì nó sẽ trở nên ổn định và hành vi động của nó có thể được phân tích thông qua mô hình toán học của nó. Kết quả mô phỏng của hệ thống này có thể được quan sát thông qua MATLAB, PROTEUS & VM Lab. Dự án này rất hữu ích trong các hệ thống phòng thủ, bệnh viện, làm vườn & trung tâm mua sắm, v.v.
Phương tiện thông tin liên lạc an toàn
Dự án này thực hiện một hệ thống cung cấp thông tin về phương tiện cũng như bảo mật với sự trợ giúp của công nghệ GSM & RFID. Trong dự án này, một hệ thống theo dõi phương tiện được phát triển để cung cấp thông tin cho khách du lịch trong các phương tiện bằng cách sử dụng công nghệ không dây để giúp nhận biết liệu hành khách còn sống hay đã chết. Để khắc phục, hệ thống này được phát triển để ngăn ngừa tai nạn của người lái và hành khách.
Xe tự lái hoặc xe tự lái
Dự án này thiết kế một chiếc xe tự lái để giảm thiểu tai nạn giao thông. Dự án này khắc phục được vấn đề bận rộn mà người dân ở các khu vực đô thị phải đối mặt như hệ thống bãi đậu xe bằng cách thay đổi cách sử dụng đất. Những chiếc xe tự lái này có thể phát triển các vấn đề đỗ xe do một số lý do. Phương tiện này có thể đưa đón du khách gần như bất kỳ nơi nào trong khu vực đô thị. Xe tự lái này có thể đỗ trong khu vực đỗ chật hẹp hơn mà không làm hỏng xe.
Hệ thống giám sát rác bằng IoT
Hiện tại, có một số phương pháp có sẵn để làm sạch và cải thiện môi trường xung quanh trong khu vực của chúng tôi. Chính phủ cũng khởi xướng nhiều phong trào khác nhau để cải thiện tình trạng sạch sẽ. Dự án này triển khai hệ thống thông báo cho các tổng công ty thành phố để kịp thời làm sạch thùng rác.
Để khắc phục vấn đề này, việc giám sát rác được phát triển. Trong dự án này, một bộ cảm biến được đặt ở trên cùng của thùng rác để thông báo việc đổ rác tới kích thước con cú của thùng. Sau khi rác được lấp đầy đến mức cao nhất, thì ngay lập tức một thông báo sẽ được gửi đến văn phòng đô thị để có thể thực hiện thêm hành động dọn rác. Vì vậy dự án này rất hữu ích để làm sạch thành phố một cách tốt hơn trong các khu đô thị. Bằng cách sử dụng dự án này, thao tác thủ công có thể được giảm bớt vì họ sẽ nhận được thông báo sau khi thùng rác được lấp đầy.
Hệ thống giám sát không dây về an toàn bom mìn
Dự án này được sử dụng để thực hiện một hệ thống khắc phục những hạn chế của hệ thống vô tuyến bằng cách sử dụng công nghệ không dây để theo dõi mỏ. Đối với điều này, mỗi người được trang bị một mô-đun RF Tx trong khi vào mỏ. Mọi bộ thu phát được đặt trong mỏ sẽ theo dõi vị trí của thợ đào.
Các bộ thu phát trong hệ thống này sử dụng một mô-đun không dây để tương tác với các trạm gốc.
Hệ thống này sử dụng các cảm biến khác nhau như độ ẩm, nhiệt độ để tạo mật độ cho các thợ mỏ và trạm gốc khi có sự thay đổi trong bầu khí quyển. Vị trí thời gian thực của từng trẻ vị thành niên có thể được giám sát thông qua các nhà điều hành mỏ trong trường hợp khẩn cấp. Các hệ thống này rất linh hoạt, độ tin cậy cao, chi phí thấp hơn và sử dụng ít điện năng hơn.
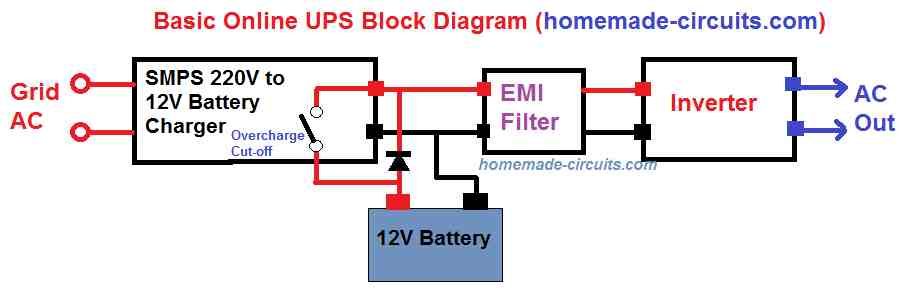
Hệ thống quản lý ắc quy sử dụng UPS & GSM
Dự án này được sử dụng để cung cấp nguồn điện dự phòng cho các công ty, ngành công nghiệp khi nguồn điện chính bị TẮT hoặc không hoạt động. Bằng cách cung cấp nguồn cung cấp dự phòng cho các tổ chức, các dịch vụ do công ty cung cấp không thể bị dừng lại. Hệ thống này sử dụng hai máy biến áp, một máy dành cho nguồn điện chính trong khi máy biến áp kia là UPS. Nếu một người muốn sử dụng nguồn cung cấp UPS thì anh ta phải gửi SMS đến modem GSM.
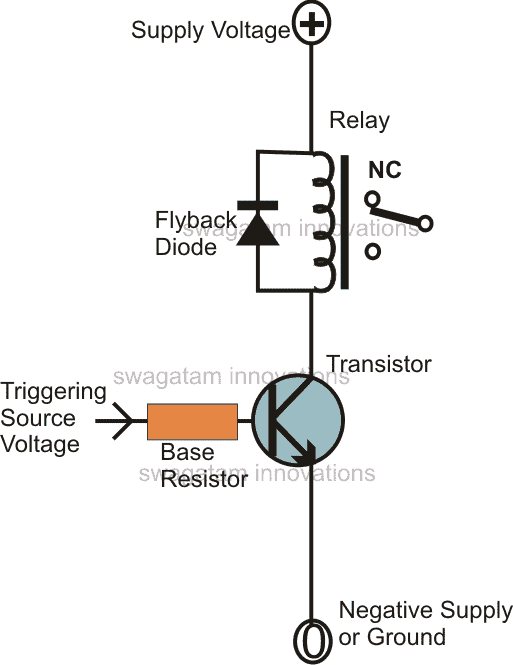
Khi modem nhận được tin nhắn SMS từ người đó để thay đổi kết nối của nguồn điện thì nó sẽ đưa ra cảnh báo đến bộ vi điều khiển để kết nối UPS và ngắt nguồn điện chính với sự trợ giúp của mạch điều khiển sử dụng rơ le.
Bằng cách sử dụng dự án này, có thể tránh được sự cố ngắt điện do nguồn cung cấp chính. Nếu nguồn cung cấp chính không có sẵn thì chúng ta có thể sử dụng nguồn cung cấp phụ bằng cách liên kết với bộ vi điều khiển.
Xem thêm một số Dự án IEEE về Hệ thống nhúng sau đây
- Điều khiển đèn AC qua điện thoại di động.
- Mạch giám sát không dây dành cho bảng quang điện trong hệ thống nối lưới.
- Triển khai SCADA dựa trên RF.
- Đo lường Chất lượng Điện và phát triển Thiết bị Màn hình.
- Bộ ghi dữ liệu nhiệt độ.
- Hệ thống giám sát và điều khiển đồng hồ đo năng lượng.
- Đèn đường dựa trên Zigbee.
- Hệ thống giám sát nhiệt độ trực tuyến
- Hệ thống giám sát đánh giá trực tuyến của dây dẫn đường truyền
Vì vậy, đây là tất cả về danh sách Dự án IEEE trên Hệ thống nhúng. Hệ thống nhúng là một lĩnh vực học tập cực kỳ rộng lớn, cần kiến thức chuyên sâu về các dự án thời gian thực để giúp những người tham vọng hiểu được sự nổi bật của miền trong lĩnh vực điện tử. Hệ thống nhúng ngày nay hoạt động trên một số thiết bị điện tử. Chỉ có một số dự án được IEEE chấp nhận và những Dự án IEEE về Hệ thống nhúng được công nhận này trở nên như tôm tươi về nhu cầu của họ.
Tín ảnh
- Bộ điều khiển đèn giao thông sử dụng Gsm & Hệ thống nhúng của Staticflickr
- Bảng điều khiển năng lượng mặt trời một trục của lâu đài cũ
- Robot nhặt sách của jhu




{kind=link}
{kind=link}