Trong bài đăng này, chúng tôi thảo luận về việc chế tạo mạch điều khiển tốc độ động cơ cảm ứng 3 pha đơn giản, mạch này cũng có thể được áp dụng cho động cơ cảm ứng một pha hoặc nghĩa đen cho bất kỳ loại động cơ xoay chiều nào.
Khi nó đến điều khiển tốc độ của động cơ cảm ứng , thông thường các bộ chuyển đổi ma trận được sử dụng, bao gồm nhiều giai đoạn phức tạp như bộ lọc LC, mảng chuyển mạch hai chiều (sử dụng IGBT), v.v.
Tất cả những điều này được sử dụng để cuối cùng đạt được tín hiệu AC cắt nhỏ có chu kỳ nhiệm vụ có thể được điều chỉnh bằng cách sử dụng mạch vi điều khiển phức tạp, cuối cùng cung cấp khả năng điều khiển tốc độ động cơ cần thiết.
Tuy nhiên, chúng tôi có thể thử nghiệm và cố gắng thực hiện điều khiển tốc độ động cơ cảm ứng 3 pha thông qua một khái niệm đơn giản hơn nhiều bằng cách sử dụng IC ghép nối quang đầu dò điểm giao cắt không tiên tiến, một triac nguồn và mạch PWM.
Sử dụng Bộ ghép nối Opto của Bộ tách sóng Không cắt ngang
Nhờ dòng bộ ghép quang MOC đã làm cho mạch điều khiển triac cực kỳ an toàn và dễ cấu hình, đồng thời cho phép tích hợp PWM không rắc rối cho các điều khiển dự kiến.
Trong một trong những bài viết trước đây của tôi, tôi đã thảo luận về một Mạch điều khiển động cơ khởi động mềm PWM đã triển khai IC MOC3063 để cung cấp khởi động mềm hiệu quả trên động cơ được kết nối.
Ở đây chúng tôi cũng sử dụng một phương pháp giống hệt nhau để thực thi mạch điều khiển tốc độ động cơ cảm ứng 3 pha được đề xuất, hình ảnh sau đây cho thấy cách thực hiện điều này:
Trong hình, chúng ta có thể thấy ba giai đoạn bộ ghép quang MOC giống nhau được cấu hình trong chế độ bộ điều chỉnh triac tiêu chuẩn của chúng và mặt đầu vào được tích hợp với mạch đơn giản IC 555 PWM .
3 mạch MOC được cấu hình để xử lý đầu vào xoay chiều 3 pha và phân phối giống nhau đến động cơ cảm ứng đi kèm.
Đầu vào PWM ở phía điều khiển LED cô lập của opto xác định tỷ lệ cắt của đầu vào xoay chiều 3 pha đang được xử lý bởi MOC ICS.
Sử dụng Bộ điều khiển PWM IC 555 (Chuyển mạch điện áp không)
Điều đó ngụ ý rằng, bằng cách điều chỉnh Nồi PWM kết hợp với IC 555 người ta có thể kiểm soát hiệu quả tốc độ của động cơ cảm ứng.
Đầu ra tại chân số 3 của nó đi kèm với một chu kỳ nhiệm vụ khác nhau, lần lượt sẽ chuyển đổi các triac đầu ra tương ứng, dẫn đến việc tăng giá trị AC RMS hoặc giảm như nhau.
Tăng RMS thông qua các PWM rộng hơn cho phép đạt được tốc độ cao hơn trên động cơ, trong khi giảm AC RMS thông qua các PWM hẹp hơn tạo ra tác dụng ngược lại, đó là nó làm cho động cơ chậm lại tương ứng.
Các tính năng trên được thực hiện với rất nhiều độ chính xác và an toàn vì các vi mạch được chỉ định với nhiều tính năng phức tạp bên trong, dành riêng cho lái xe triac và tải nặng cảm ứng chẳng hạn như động cơ cảm ứng, solenoid, van, công tắc tơ, rơ le trạng thái rắn, v.v.
IC cũng đảm bảo hoạt động cách ly hoàn hảo cho giai đoạn DC, cho phép người dùng thực hiện các điều chỉnh mà không sợ bị điện giật.
Nguyên tắc này cũng có thể được sử dụng hiệu quả để điều khiển tốc độ động cơ một pha, bằng cách sử dụng một IC MOC thay vì 3.
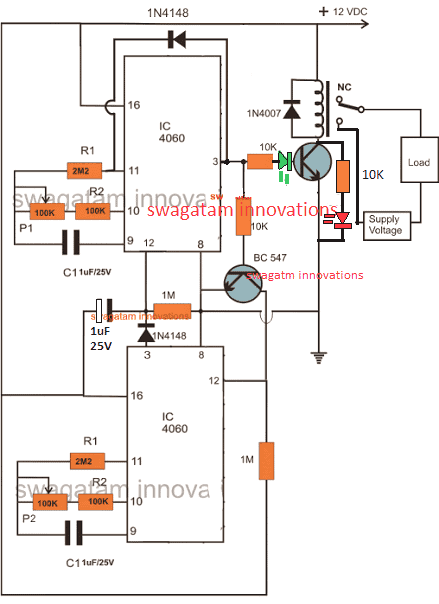
Thiết kế thực sự dựa trên ổ triac tỷ lệ thời gian học thuyết. Mạch PWM IC555 trên có thể được điều chỉnh để tạo ra chu kỳ làm việc 50% ở tần số cao hơn nhiều, trong khi mạch PWM dưới có thể được sử dụng để thực hiện hoạt động điều khiển tốc độ của động cơ cảm ứng thông qua các điều chỉnh của nồi liên kết.
IC 555 này được khuyến nghị có tần số tương đối thấp hơn so với mạch trên IC 555. Điều này có thể được thực hiện bằng cách tăng tụ điện chân # 6/2 lên khoảng 100nF.

LƯU Ý: THÊM CÁC CHỈ SỐ PHÙ HỢP TRONG CÁC DÂY CHUYỀN CÓ DÂY PHA CÓ THỂ NÂNG CAO HIỆU SUẤT ĐIỀU KHIỂN TỐC ĐỘ CỦA HỆ THỐNG.
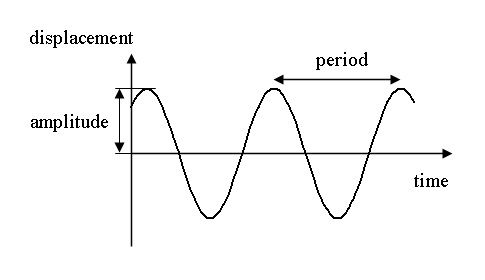
Dạng sóng giả định và Điều khiển pha sử dụng Khái niệm trên:

Phương pháp điều khiển động cơ cảm ứng 3 pha được giải thích ở trên thực sự khá thô sơ vì nó có không có điều khiển V / Hz .
Nó chỉ đơn giản sử dụng việc chuyển đổi nguồn điện BẬT / TẮT ở các tốc độ khác nhau để tạo ra công suất trung bình cho động cơ và điều khiển tốc độ bằng cách thay đổi nguồn AC trung bình này cho động cơ.
Hãy tưởng tượng nếu bạn bật / tắt động cơ bằng tay 40 lần hoặc 50 lần mỗi phút. Điều đó sẽ dẫn đến động cơ của bạn chậm lại đến một số giá trị trung bình tương đối, nhưng vẫn di chuyển liên tục. Nguyên tắc trên hoạt động theo cùng một cách.
Một cách tiếp cận kỹ thuật hơn là thiết kế một mạch đảm bảo kiểm soát đúng tỷ lệ V / Hz và tự động điều chỉnh giống nhau tùy thuộc vào tốc độ trượt hoặc bất kỳ biến động điện áp nào.
Về cơ bản, chúng tôi sử dụng các giai đoạn sau:
- Mạch điều khiển IGBT H-Bridge hoặc Full Bridge
- Giai đoạn máy phát điện 3 pha để cung cấp toàn bộ mạch cầu
- Bộ xử lý V / Hz PWM
Sử dụng mạch điều khiển IGBT toàn cầu
Nếu các quy trình thiết lập của thiết kế dựa trên triac ở trên khiến bạn khó khăn, bạn có thể thử điều khiển tốc độ động cơ cảm ứng dựa trên PWM toàn cầu sau:

Mạch hiển thị trong hình trên sử dụng một trình điều khiển toàn cầu chip đơn IC IRS2330 (phiên bản mới nhất là 6EDL04I06NT) có tất cả các tính năng được tích hợp sẵn nhằm đáp ứng sự an toàn và vận hành động cơ 3 pha hoàn hảo.
IC chỉ cần một đầu vào logic 3 pha đồng bộ qua sơ đồ chân HIN / LIN của nó để tạo ra đầu ra dao động 3 pha cần thiết, cuối cùng được sử dụng để vận hành mạng IGBT toàn cầu và động cơ 3 pha được kết nối.
Các điều khiển tốc độ phun PWM được thực hiện thông qua 3 giai đoạn trình điều khiển NPN / PNP nửa cầu riêng biệt, được điều khiển bằng nguồn cấp SPWM từ máy phát IC 555 PWM như đã thấy trong các thiết kế trước đây của chúng tôi. Mức PWM này cuối cùng có thể được sử dụng để điều khiển tốc độ của động cơ cảm ứng.
Trước khi chúng ta tìm hiểu phương pháp điều khiển tốc độ thực tế cho động cơ cảm ứng, trước tiên chúng ta hãy hiểu cách tự động Điều khiển V / Hz có thể đạt được bằng cách sử dụng một vài mạch IC 555, như được thảo luận bên dưới
Mạch xử lý V / Hz PWM tự động (Vòng lặp đóng)
Trong các phần trên, chúng ta đã tìm hiểu các thiết kế giúp động cơ cảm ứng di chuyển với tốc độ do nhà sản xuất chỉ định, nhưng nó sẽ không điều chỉnh theo tỷ lệ V / Hz không đổi trừ khi bộ xử lý PWM sau được tích hợp với H -Bridge nguồn cấp dữ liệu đầu vào PWM.

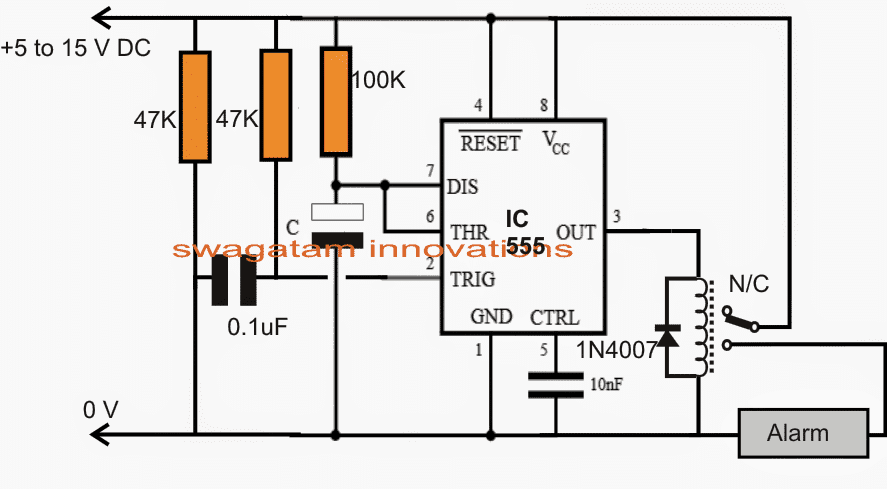
Mạch trên là một đơn giản Máy phát điện PWM sử dụng một vài IC 555 . IC1 tạo ra tần số PWM được chuyển đổi thành sóng tam giác tại chân số 6 của IC2 với sự trợ giúp của R4 / C3.
Các sóng tam giác này được so sánh với gợn sóng hình sin tại chân số 5 của IC2. Các gợn sóng mẫu này được thu nhận bằng cách chỉnh lưu nguồn điện xoay chiều 3 pha thành gợn sóng xoay chiều 12V và được đưa đến chân số 5 của IC2 để xử lý theo yêu cầu.
Bằng cách so sánh hai dạng sóng, một kích thước phù hợp SPWM được tạo tại chân số 3 của IC2, trở thành PWM điều khiển cho mạng cầu H.
Cách hoạt động của mạch V / Hz
Khi nguồn được BẬT, tụ điện ở chân số 5 bắt đầu bằng cách tạo ra điện áp bằng không ở chân số 5, điều này gây ra giá trị SPWM thấp nhất cho Mạch cầu H , do đó cho phép động cơ cảm ứng khởi động với khởi động mềm dần dần.
Khi tụ điện này tích điện, điện thế ở chân số 5 tăng lên tương ứng với việc tăng SPWM và cho phép động cơ tăng dần tốc độ.
Chúng ta cũng có thể thấy một mạch phản hồi máy đo tốc độ cũng được tích hợp với chân số 5 của IC2.
Điều này máy đo tốc độ giám sát tốc độ rôto hoặc tốc độ trượt và tạo ra điện áp bổ sung tại chân số 5 của IC2.
Bây giờ khi tốc độ động cơ tăng, tốc độ trượt sẽ cố gắng đồng bộ hóa với tần số stato và trong quá trình này, nó bắt đầu tăng tốc độ.
Sự gia tăng độ trượt cảm ứng này làm tăng điện áp của máy đo tốc độ tương ứng, do đó làm cho IC2 tăng SPWM đầu ra và điều này lại làm tăng thêm tốc độ động cơ.
Điều chỉnh trên cố gắng duy trì tỷ lệ V / Hz ở mức khá ổn định cho đến khi SPWM từ IC2 không thể tăng thêm nữa.
Tại thời điểm này, tốc độ trượt và tốc độ stato đạt được trạng thái ổn định và điều này được duy trì cho đến khi điện áp đầu vào hoặc tốc độ trượt (do tải) không bị thay đổi. Trong trường hợp chúng bị thay đổi, mạch xử lý V / Hz sẽ hoạt động trở lại và bắt đầu điều chỉnh tỷ lệ để duy trì phản ứng tối ưu của tốc độ động cơ cảm ứng.
Máy đo tốc độ
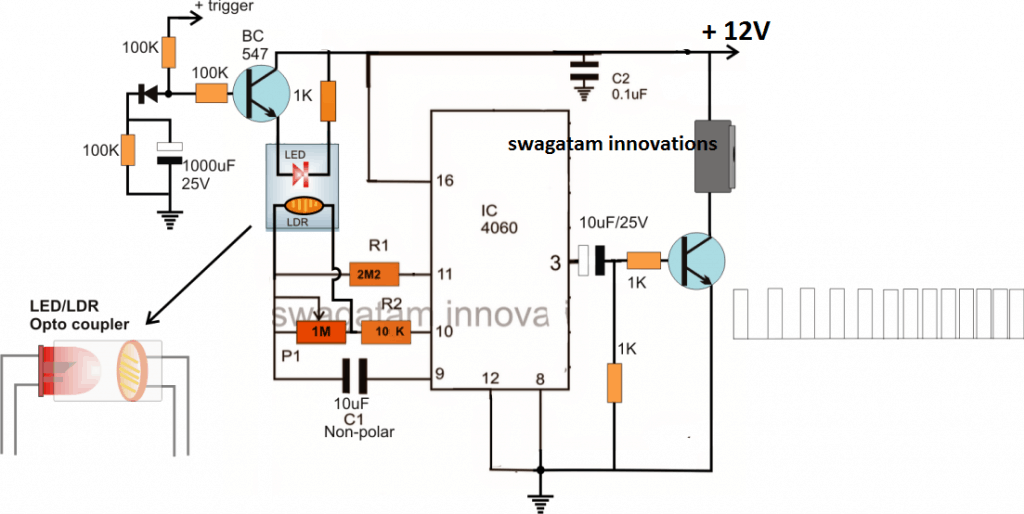
Các Mạch đo tốc độ cũng có thể được chế tạo với giá rẻ bằng cách sử dụng mạch đơn giản sau và tích hợp với các giai đoạn mạch được giải thích ở trên:

Cách triển khai Kiểm soát tốc độ
Trong các đoạn trên, chúng ta đã hiểu quy trình điều tiết tự động có thể đạt được bằng cách tích hợp phản hồi về máy đo tốc độ đến mạch điều khiển SPWM tự động điều chỉnh.
Bây giờ chúng ta hãy tìm hiểu cách điều khiển tốc độ của động cơ cảm ứng bằng cách thay đổi tần số, điều này cuối cùng sẽ buộc SPWM giảm và duy trì tỷ lệ V / Hz chính xác.
Sơ đồ sau giải thích giai đoạn kiểm soát tốc độ:

Ở đây chúng ta có thể thấy một mạch phát điện 3 pha sử dụng IC 4035 có tần số dịch pha có thể thay đổi bằng cách thay đổi đầu vào xung nhịp tại chân # 6 của nó.
Tín hiệu 3 pha được áp dụng trên các cổng IC 4049 để tạo ra các nguồn cấp HIN, LIN cần thiết cho mạng trình điều khiển toàn cầu.
Điều này ngụ ý rằng bằng cách thay đổi tần số xung nhịp của IC 4035 một cách thích hợp, chúng ta có thể thay đổi hiệu quả tần số 3 pha hoạt động của động cơ cảm ứng.
Điều này được thực hiện thông qua một mạch ổn định IC 555 đơn giản, cung cấp tần số có thể điều chỉnh tại chân số 6 của IC 4035 và cho phép điều chỉnh tần số thông qua nồi 100K đi kèm. Tụ điện C cần được tính toán sao cho dải tần điều chỉnh nằm trong thông số kỹ thuật chính xác của động cơ cảm ứng được kết nối.
Khi tần số nồi biến đổi thì tần số hiệu dụng của động cơ cảm ứng cũng thay đổi, tương ứng với tốc độ của động cơ cũng thay đổi.
Ví dụ khi giảm tần số, làm cho tốc độ động cơ giảm, do đó làm cho đầu ra của máy đo tốc độ giảm điện áp tương ứng.
Sự giảm tương ứng trong đầu ra của máy đo tốc độ buộc SPWM thu hẹp lại và do đó kéo đầu ra điện áp xuống động cơ một cách tương ứng.
Hành động này đến lượt nó đảm bảo rằng tỷ lệ V / Hz được duy trì trong khi kiểm soát tốc độ động cơ cảm ứng thông qua điều khiển tần số.
Cảnh báo: Khái niệm trên chỉ được thiết kế dựa trên các giả định lý thuyết, vui lòng tiến hành một cách thận trọng.
Nếu bạn có thêm bất kỳ nghi ngờ nào về thiết kế bộ điều khiển tốc độ động cơ cảm ứng 3 pha này, chúng tôi hoan nghênh bạn đăng tải điều tương tự thông qua các nhận xét của bạn.
Một cặp: Cách thiết kế mạch nguồn điện liên tục (UPS) Tiếp theo: BẬT / TẮT hai tải thay thế bằng IC 555