
Bộ vi điều khiển là một máy tính nhỏ trên một vi mạch duy nhất tích hợp tất cả các tính năng có trong bộ vi xử lý. Để phục vụ các ứng dụng khác nhau, nó tập trung nhiều vào các tiện ích của chip như RAM, ROM, các cổng I / O, bộ định thời, cổng nối tiếp, mạch xung nhịp và các ngắt. Bộ vi điều khiển được sử dụng trong các thiết bị được điều khiển tự động khác nhau như điều khiển từ xa, hệ thống điều khiển động cơ ô tô, thiết bị y tế, dụng cụ điện, máy văn phòng, đồ chơi, v.v. những hệ thống nhúng . Vì vậy, bài viết này giới thiệu tổng quan về sơ đồ chân của vi điều khiển 8051 kèm theo giải thích và 8051 ý tưởng dự án dựa trên .

Bộ vi điều khiển 8051
Trong trường hợp vi xử lý, chúng ta phải giao tiếp mạch bổ sung bên ngoài, chẳng hạn như RAM, ROM, cổng I / O, bộ định thời, cổng nối tiếp, mạch đồng hồ và các thiết bị ngoại vi bên ngoài khác, trong khi trong vi điều khiển, tất cả các thiết bị ngoại vi này đều được tích hợp sẵn. Chúng ta hãy cùng tìm hiểu sơ lược về sơ đồ chân của vi điều khiển 8051.
Các chân vi điều khiển hoạt động
Bộ vi điều khiển 8051 có bốn cổng I / O trong đó mỗi cổng chứa 8 chân có thể được cấu hình làm đầu vào hoặc đầu ra. Cấu hình Pin - cho dù nó được định cấu hình là I / P (1) hay O / P (0), phụ thuộc vào trạng thái logic của nó. Để cấu hình một chân vi điều khiển làm đầu ra, cần phải áp dụng mức logic không (0) cho các bit cổng I / O thích hợp. Trong trường hợp này, mức điện áp tại chân thích hợp sẽ là 0.
Tương tự, để cấu hình một chân vi điều khiển làm đầu vào, cần phải áp dụng logic một (1) cho cổng phù hợp. Trong trường hợp này, mức điện áp trên chân thích hợp sẽ là 5V. Điều này có vẻ khó hiểu, tất cả sẽ trở nên rõ ràng sau khi nghiên cứu mạch điện tử đơn giản được kết nối với chân I / O.
Pin Đầu vào / Đầu ra (I / O)
Hình dưới đây cho thấy một sơ đồ đơn giản của tất cả các mạch bên trong bộ vi điều khiển, được kết nối với một trong các chân của nó. Nó chỉ định cho tất cả các chân ngoại trừ các chân của cổng P0 không được tích hợp điện trở kéo lên.

Pin Đầu vào / Đầu ra (I / O)
Chân đầu ra
Logic 0 được áp dụng cho một bit của thanh ghi P, sau đó bóng bán dẫn FE đầu ra được bật, do đó kết nối chân thích hợp với đất.

Chân đầu ra
Đầu vào pin
Logic 1 được áp dụng cho một bit của thanh ghi P. Đầu ra bóng bán dẫn hiệu ứng trường bị tắt, và chân thích hợp vẫn được kết nối với điện áp của nguồn điện, qua một điện trở kéo lên có điện trở cao.

Ghim đầu vào
Sơ đồ chân của vi điều khiển 8051
Vi điều khiển 8051 họ (89C51, 8751, DS89C4xO, 89C52) có các gói khác nhau như gói quad-flat, gói mang chip không chì và gói kép trong dòng. Tất cả các gói này bao gồm 40 chân dành riêng cho một số chức năng như I / O, địa chỉ, RD, WR, dữ liệu và ngắt. Tuy nhiên, một số công ty cung cấp phiên bản 20 chân của vi điều khiển cho các ứng dụng ít đòi hỏi hơn bằng cách giảm số lượng cổng I / O. Tuy nhiên, phần lớn các nhà phát triển sử dụng chip 40 chân.

Sơ đồ chân của vi điều khiển 8051
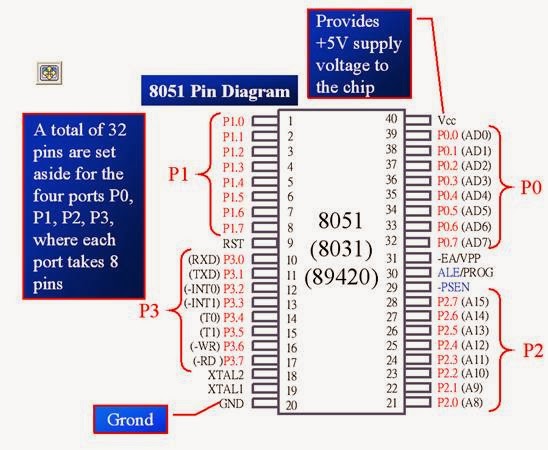
Sơ đồ chân của vi điều khiển 8051 gồm 40 chân như hình bên dưới. Tổng cộng có 32 chân được đặt thành bốn Cổng như P0, P1, P2 và P3. Trong đó, mỗi cổng chứa 8 chân. Do đó, sơ đồ chân của vi điều khiển 8051 và giải thích được đưa ra bên dưới.
- Cổng1 (Pin1 đến Pin8): Port1 bao gồm chân1.0 đến chân1.7 và các chân này có thể được cấu hình làm chân đầu vào hoặc đầu ra.
- Pin 9 (RST): Chân Reset dùng để Reset Vi điều khiển 8051 bằng cách cấp xung dương vào Chân này.
- Cổng 3 (Chân 10 đến 17): Các chân Port3 tương tự như các chân port1 và có thể được sử dụng như các chân Đầu vào hoặc Đầu ra phổ biến. Các chân này Ghim chức năng kép và chức năng của mỗi Chân được đưa ra như:
- Chân 10 (RXD): Chân RXD là Đầu vào Giao tiếp Không đồng bộ Nối tiếp hoặc Giao tiếp đồng bộ nối tiếp Đầu ra.
- Chân 11 (TXD): Đầu ra giao tiếp không đồng bộ nối tiếp hoặc Đồng hồ giao tiếp đồng bộ nối tiếp Đầu ra.
- Chân 12 (INT0): Đầu vào của ngắt 0
- Chân 13 (INT1): Đầu vào của ngắt 1
- Chân 14 (T0): Đầu vào của đồng hồ Counter 0
- Chân 15 (T1): Đầu vào của đồng hồ Counter 1
- Chân 16 (WR): Viết tín hiệu để ghi nội dung trên RAM ngoài.
- Chân 17 (RD): Tín hiệu đọc để đọc nội dung của RAM ngoài.
- Chân 18 và 19 (XTAL2, XTAL1): Các chân X2 và X1 là các chân đầu ra đầu vào cho bộ dao động. Các chân này được sử dụng để kết nối bộ dao động bên trong với bộ vi điều khiển.
- Chân 20 (GND): Chân 20 là chân nối đất.
- Port2 (Pin 21 đến Pin28): Port2 bao gồm pin21 đến pin28 có thể được cấu hình làm Chân đầu ra đầu vào. Tuy nhiên, điều này chỉ khả thi khi chúng tôi không sử dụng bất kỳ bộ nhớ ngoài nào. Nếu chúng ta sử dụng bộ nhớ ngoài, thì các chân này sẽ hoạt động như bus địa chỉ bậc cao (A8 đến A15).
- Chân 29 (PSEN): Chân này được sử dụng để kích hoạt bộ nhớ chương trình bên ngoài. Nếu chúng ta sử dụng ROM bên ngoài để lưu trữ chương trình, thì logic 0 xuất hiện trên đó, cho biết bộ điều khiển Micro đọc dữ liệu từ bộ nhớ.
- Pin 30 (ALE): Chân Address Latch Enable là một tín hiệu đầu ra cao đang hoạt động. Nếu chúng ta sử dụng nhiều chip nhớ, thì chân này được dùng để phân biệt giữa chúng. Chân này cũng cung cấp đầu vào xung chương trình trong quá trình lập trình EPROM.
- Chân 31 (EA): Nếu chúng ta phải sử dụng nhiều bộ nhớ thì việc áp dụng logic 1 cho chân này chỉ thị cho Vi điều khiển đọc dữ liệu từ cả hai bộ nhớ: đầu tiên bên trong và sau đó bên ngoài.
- Cổng 0 (Chân 32 đến 39): Tương tự như chân cổng 2 và 3, các chân này có thể được sử dụng làm chân đầu ra đầu vào khi chúng tôi không sử dụng bất kỳ bộ nhớ ngoài nào. Khi ALE hoặc Chân 30 ở mức 1, thì cổng này được sử dụng làm bus dữ liệu: khi chân ALE ở 0, thì cổng này được sử dụng làm bus địa chỉ bậc thấp hơn (A0 đến A7)
- Pin40 (VCC): Chân VCC này được sử dụng để cấp nguồn.
Có rất nhiều ứng dụng của vi điều khiển 8051. Vì vậy, 8051 dự án vi điều khiển rất tốt cho kỹ sư năm cuối. Do đó, bạn có thể tham khảo bất kỳ dự án nào trong số các dự án được liệt kê dưới đây để hiểu thực tế các hoạt động của chân vi điều khiển 8051.

Dự án vi điều khiển 8051
- Xoay hai chiều của Động cơ cảm ứng một pha không có Tụ chạy
- Bảo vệ quá điện áp- dưới điện áp
- Phát hiện lái xe phát ban không dây
- Dựa trên Arduino Tự động hóa gia đình
- Hoạt động tải tuần tự có thể lập trình từ xa dựa trên Android
- Robot gián điệp chiến trường với máy ảnh không dây nhìn ban đêm của ứng dụng Android
- Điều khiển thiết bị gia dụng điều khiển từ xa bằng ứng dụng Android
- Tự động dựa trên mật độ Kiểm soát tín hiệu giao thông với tính năng Ghi đè từ xa dựa trên Android
- Hoạt động bốn góc phần tư của Động cơ DC được điều khiển từ xa bằng ứng dụng Android
- Điều chỉnh vị trí đĩa 3D từ xa bằng ứng dụng Android
- Mở cửa điều khiển từ xa dựa trên mật khẩu bằng ứng dụng Android
- Xe rô bốt điều khiển bằng giọng nói với nhận dạng giọng nói khoảng cách xa
- Giám sát từ xa dựa trên XBEE của 3 thông số về tình trạng máy biến áp / máy phát điện với thông báo bằng giọng nói và giao diện PC không dây
- Vận hành cổng giao cắt mức đường sắt từ xa bằng Android
- Tự động hóa nhà bằng ứng dụng Android Điều khiển từ xa dựa trên
- Truyền điện không dây i n Không gian 3D
- Tín hiệu giao thông dựa trên mật độ với tính năng ghi đè từ xa trong trường hợp khẩn cấp
- Giám sát từ xa dựa trên XBEE của 3 thông số về tình trạng máy biến áp / máy phát điện
- Nguồn điện tự chuyển mạch
- Bãi đậu xe trả phí dựa trên RFID
- Đèn khẩn cấp tự động dựa trên Led
- Bộ điều khiển mức chất lỏng không tiếp xúc
Đây là về các chân vi điều khiển hoạt động cơ bản với thời gian thực Ý tưởng dự án dựa trên vi điều khiển 8051 . Hơn nữa, bất kỳ câu hỏi nào liên quan đến bài viết này hoặc dự án điện tử mới nhất , hãy liên hệ với chúng tôi bằng cách bình luận trong phần bình luận bên dưới.
Tín ảnh:
Sơ đồ chân của vi điều khiển 8051 blogspot
Bộ vi điều khiển 8051 cotsjournalonline





{kind=link}