Trong khoảng thời gian 18thứ tựchính thế kỷ này, đã có sự phát triển của động cơ điện một chiều. Sự phát triển của động cơ điện một chiều đã được nâng cao rộng rãi và chúng được ứng dụng đáng kể trong nhiều ngành công nghiệp. Vào đầu những năm 1800 và với những cải tiến được thực hiện vào năm 1832, động cơ DC ban đầu được phát triển bởi nhà nghiên cứu người Anh Sturgeon. Ông đã phát minh ra loại cổ góp ban đầu của động cơ DC, nơi nó cũng có khả năng mô phỏng máy móc. Nhưng người ta có thể thắc mắc chức năng của động cơ DC là gì và tại sao điều quan trọng là phải biết về điều khiển tốc độ động cơ DC. Vì vậy, bài viết này giải thích rõ ràng hoạt động của nó và các kỹ thuật điều khiển tốc độ khác nhau.
Động cơ DC là gì?
Một động cơ Dc được hoạt động bằng cách sử dụng dòng điện một chiều, nơi nó biến năng lượng điện nhận được thành năng lượng cơ học. Điều này gây ra sự thay đổi luân phiên trong chính thiết bị, do đó cung cấp sức mạnh để vận hành các ứng dụng khác nhau trong nhiều miền.
Điều khiển tốc độ động cơ DC là một trong những tính năng hữu ích nhất của động cơ. Bằng cách kiểm soát tốc độ của động cơ, bạn có thể thay đổi tốc độ của động cơ theo yêu cầu và có thể nhận được hoạt động cần thiết.
Cơ chế điều khiển tốc độ có thể áp dụng trong nhiều trường hợp như điều khiển chuyển động của các phương tiện robot, chuyển động của động cơ trong nhà máy giấy và chuyển động của động cơ trong thang máy, nơi các loại động cơ DC khác nhau được sử dụng.
Nguyên lý làm việc của động cơ DC
Động cơ điện một chiều hoạt động theo nguyên tắc khi một dây dẫn mang dòng điện được đặt trong trung thành từ tính d, nó chịu một lực cơ học. Trong động cơ điện một chiều thực tế, phần ứng là vật dẫn mang dòng điện và từ trường cung cấp từ trường.
Khi vật dẫn (phần ứng) được cung cấp dòng điện, nó sẽ tạo ra từ thông của chính nó. Từ thông cộng với từ thông do các cuộn dây từ trường theo một hướng hoặc hủy bỏ từ thông do các cuộn dây từ trường. Sự tích tụ của từ thông theo một hướng so với hướng khác tác động lên vật dẫn, và do đó, nó bắt đầu quay.
Theo định luật cảm ứng điện từ Faraday, chuyển động quay của vật dẫn tạo ra EMF . EMF này, theo định luật Lenz, có xu hướng chống lại nguyên nhân, tức là điện áp được cung cấp. Do đó, động cơ điện một chiều có một đặc tính rất đặc biệt là điều chỉnh mô-men xoắn của nó trong trường hợp tải thay đổi do EMF phía sau.
Tại sao điều khiển tốc độ động cơ DC lại quan trọng?
Kiểm soát tốc độ trong máy cho thấy tác động đến tốc độ quay của động cơ, nơi ảnh hưởng trực tiếp đến chức năng của máy và rất quan trọng đối với hiệu suất và kết quả của hiệu suất. Tại thời điểm khoan, mọi loại vật liệu đều có tốc độ quay riêng và nó cũng thay đổi dựa trên kích thước mũi khoan.
Trong trường hợp lắp đặt máy bơm, sẽ có sự thay đổi về tốc độ thông lượng và do đó băng tải cần phải đồng bộ với tốc độ chức năng của thiết bị. Những yếu tố này phụ thuộc trực tiếp hoặc gián tiếp vào tốc độ của động cơ. Do đó, người ta nên xem xét tốc độ động cơ DC và quan sát các loại phương pháp điều khiển tốc độ.
Điều khiển tốc độ động cơ DC được thực hiện bằng tay bởi công nhân hoặc bằng cách sử dụng bất kỳ công cụ điều khiển tự động nào. Điều này dường như trái ngược với giới hạn tốc độ khi phải có quy định tốc độ chống lại sự thay đổi tự nhiên của tốc độ do sự thay đổi của tải trọng trục.
Nguyên tắc kiểm soát tốc độ
Từ hình trên, phương trình điện áp của một Động cơ DC Là
V = Eb + IaRa
V là điện áp được cung cấp, Eb là EMF phía sau, Ia là dòng điện phần ứng và Ra là điện trở phần ứng.
Chúng tôi đã biết rằng
Eb = (PøNZ) / 60A.
P - số cực,
Một hằng số
Z - số lượng dây dẫn
N- tốc độ của động cơ
Thay giá trị của Eb vào phương trình điện áp, ta được
V = (PøNZ) / 60A) + IaRa
Hoặc, V - IaRa = (PøNZ) / 60A
tức là N = (PZ / 60A) (V - IaRa) / ø
Phương trình trên cũng có thể được viết dưới dạng:
N = K (V - IaRa) / ø, K là hằng số
Điều này ngụ ý ba điều:
- Tốc độ của động cơ tỷ lệ thuận với điện áp cung cấp.
- Tốc độ của động cơ tỉ lệ nghịch với độ sụt điện áp phần ứng.
- Tốc độ của động cơ tỷ lệ nghịch với từ thông do phát hiện tại hiện trường
Do đó, tốc độ của động cơ DC có thể được điều khiển theo ba cách:
- Bằng cách thay đổi điện áp cung cấp
- Bằng cách thay đổi từ thông, và bằng cách thay đổi dòng điện qua cuộn dây trường
- Bằng cách thay đổi điện áp phần ứng và bằng cách thay đổi điện trở phần ứng
Nhiều kỹ thuật điều khiển tốc độ động cơ DC
Vì có hai loại động cơ DC, ở đây chúng ta sẽ thảo luận rõ ràng về các phương pháp điều khiển tốc độ của cả dòng DC và động cơ shunt.
Điều khiển tốc độ động cơ DC trong các loại sê-ri
Nó có thể được phân loại thành hai loại và đó là:
- Kỹ thuật điều khiển phần ứng
- Kỹ thuật kiểm soát hiện trường
Kỹ thuật điều khiển phần ứng được phân loại thêm thành ba loại
- Điện trở kiểm soát phần ứng
- Điều khiển phần ứng co lại
- Điện áp đầu cuối phần ứng
Kháng chiến kiểm soát phần ứng
Kỹ thuật này được sử dụng rộng rãi nhất khi điện trở điều chỉnh có kết nối nối tiếp với điện trở của nguồn cung cấp động cơ. Hình ảnh dưới đây giải thích điều này.

Kiểm soát điện trở phần ứng
Có thể bỏ qua tổn thất công suất xảy ra trong điện trở điều khiển của động cơ dòng DC vì kỹ thuật điều chỉnh này chủ yếu được sử dụng trong thời gian dài để giảm tốc độ tại thời điểm các tình huống tải nhẹ. Đây là một kỹ thuật tiết kiệm chi phí cho mô-men xoắn bền bỉ và chủ yếu được thực hiện trong việc lái xe cẩu, tàu hỏa và các phương tiện khác.
Điều khiển phần ứng co lại
Ở đây, biến trở sẽ ở trong cả hai chuỗi và kết nối shunting với phần ứng. Sẽ có sự thay đổi trong mức điện áp đặt vào phần ứng và điều này thay đổi bằng cách thay đổi loạt sự biến đổi . Trong khi đó, sự thay đổi trong dòng điện kích thích diễn ra bằng cách thay đổi bộ điều biến shunt. Kỹ thuật điều khiển tốc độ trong động cơ điện một chiều này không quá tốn kém vì tổn thất điện năng đáng kể trong điện trở điều chỉnh tốc độ. Tốc độ có thể được điều chỉnh ở một mức độ nào đó nhưng không được cao hơn mức bình thường của tốc độ.

Phương pháp điều khiển tốc độ động cơ DC phần ứng Shunted
Điện áp đầu cuối phần ứng
Tốc độ của động cơ dòng DC cũng có thể được thực hiện thông qua việc cung cấp điện cho động cơ bằng cách sử dụng điện áp cung cấp khác nhau, nhưng phương pháp này tốn kém và không được thực hiện rộng rãi.
Kỹ thuật điều khiển hiện trường được phân loại thành hai loại:
- Bộ chuyển đổi trường
- Điều khiển trường được chạm (Điều khiển trường được chạm)
Kỹ thuật chuyển đổi trường
Kỹ thuật này sử dụng một bộ tách sóng. Tốc độ từ thông qua trường có thể được giảm bằng cách đóng một số phần của dòng động cơ trên trường nối tiếp. Càng nhỏ hơn là điện trở của bộ chuyển đổi, dòng điện trường ít hơn. Kỹ thuật này được sử dụng cho nhiều hơn phạm vi tốc độ bình thường và được thực hiện trên các ổ đĩa điện, nơi tốc độ tăng khi giảm tải.

Điều khiển tốc độ động cơ DC bộ chuyển đổi trường
Kiểm soát trường được khai thác
Cũng ở đây, với việc giảm từ thông, tốc độ sẽ được tăng lên và nó được thực hiện bằng cách giảm số vòng của cuộn dây trường từ nơi diễn ra dòng chảy của dòng điện. Ở đây, số lần điều chỉnh trong cuộn dây trường được lấy ra và kỹ thuật này được sử dụng trong đường dây điện.
Kiểm soát tốc độ của động cơ Shunt DC
Nó có thể được phân loại thành hai loại và đó là:
- Kỹ thuật kiểm soát hiện trường
- Kỹ thuật điều khiển phần ứng
Phương pháp điều khiển trường cho động cơ DC Shunt
Trong phương pháp này, từ thông do các cuộn dây từ trường thay đổi để thay đổi tốc độ của động cơ.
Vì từ thông phụ thuộc vào dòng điện chạy qua cuộn dây, nên nó có thể thay đổi bằng cách thay đổi dòng điện qua cuộn dây. Điều này có thể đạt được bằng cách sử dụng một biến trở mắc nối tiếp với điện trở cuộn dây trường.
Ban đầu, khi biến trở được giữ ở vị trí cực tiểu của nó, dòng điện danh định chạy qua cuộn dây do điện áp cung cấp danh định và kết quả là tốc độ được giữ bình thường. Khi tăng dần điện trở thì cường độ dòng điện qua cuộn dây giảm dần. Điều này đến lượt nó làm giảm thông lượng được tạo ra. Do đó, tốc độ của động cơ tăng lên vượt quá giá trị bình thường của nó.
Phương pháp điều khiển điện trở phần ứng cho động cơ DC Shunt
Với phương pháp này, tốc độ của động cơ điện một chiều có thể được điều khiển bằng cách điều khiển điện trở phần ứng để điều khiển sụt áp trên phần ứng. Phương pháp này cũng sử dụng một biến trở mắc nối tiếp với phần ứng.
Khi biến trở đạt đến giá trị nhỏ nhất, điện trở phần ứng ở mức bình thường, và do đó, điện áp phần ứng giảm xuống. Khi tăng dần giá trị điện trở thì hiệu điện thế trên phần ứng giảm dần. Điều này dẫn đến giảm tốc độ của động cơ.
Phương pháp này đạt được tốc độ của động cơ dưới phạm vi bình thường của nó.
Phương pháp điều khiển điện áp phần ứng cho động cơ Shunt DC (Phương pháp Ward Leonard)
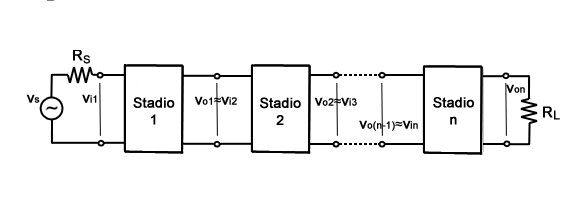
Kỹ thuật Ward Leonard của Mạch điều khiển tốc độ động cơ DC được hiển thị như sau:
Trong hình trên, M là động cơ chính mà tốc độ của nó được điều chỉnh và G tương ứng với máy phát điện một chiều được kích thích riêng, nơi điều này được điều khiển bằng cách sử dụng động cơ ba pha và nó có thể là động cơ đồng bộ hoặc động cơ cảm ứng. Mô hình kết hợp máy phát điện một chiều và động cơ điều khiển xoay chiều này được gọi là bộ M-G.
Điện áp của máy phát được thay đổi bằng cách thay đổi dòng điện trường của máy phát. Mức điện áp này khi cung cấp cho phần ứng của động cơ điện một chiều và khi đó M thì biến thiên. Để giữ cho từ thông của trường động cơ không đổi, dòng điện trường động cơ phải được duy trì như không đổi. Khi tốc độ động cơ được điều chỉnh, thì dòng điện phần ứng đối với động cơ phải bằng dòng điện định mức.
Dòng điện trường được phân phối sẽ khác để mức điện áp phần ứng thay đổi từ ‘0’ đến mức danh định. Khi điều chỉnh tốc độ tương ứng với dòng điện danh định và với từ thông trường liên tục của động cơ và từ thông trường cho đến khi đạt được tốc độ danh định. Và vì công suất là sản phẩm của tốc độ và mô-men xoắn và nó có tỷ lệ thuận với tốc độ. Với điều này, khi có sự gia tăng sức mạnh, tốc độ sẽ tăng lên.
Cả hai phương pháp nêu trên đều không thể kiểm soát tốc độ trong phạm vi mong muốn. Hơn nữa, phương pháp điều khiển từ thông có thể ảnh hưởng đến sự chuyển mạch, trong khi phương pháp điều khiển phần ứng liên quan đến tổn thất công suất lớn do sử dụng một điện trở mắc nối tiếp với phần ứng. Do đó, một phương pháp khác thường được mong muốn - phương pháp điều khiển điện áp cung cấp để điều khiển tốc độ động cơ.
Do đó, với kỹ thuật Ward Leonard, bộ truyền động công suất có thể điều chỉnh và giá trị không đổi của mô-men xoắn được thu nhận từ mức tốc độ tối thiểu đến mức tốc độ cơ bản. Kỹ thuật điều chỉnh thông lượng trường chủ yếu được sử dụng khi mức tốc độ lớn hơn tốc độ cơ bản.
Ở đây, trong chức năng, dòng điện phần ứng được giữ ở mức không đổi ở giá trị xác định và giá trị điện áp của máy phát được duy trì ở mức không đổi. Trong phương pháp này, cuộn dây nhận được một điện áp cố định, và phần ứng nhận được một điện áp thay đổi.
Một kỹ thuật của phương pháp điều khiển điện áp như vậy liên quan đến việc sử dụng cơ cấu thiết bị đóng cắt để cung cấp điện áp thay đổi cho phần ứng và kỹ thuật kia sử dụng Máy phát điện điều khiển động cơ xoay chiều để cung cấp điện áp thay đổi cho phần ứng ( Hệ thống Ward-Leonard ).
Các ưu nhược điểm của phường Leonard metho d là:
Các lợi ích của việc sử dụng kỹ thuật Ward Leonard để điều khiển tốc độ động cơ DC như sau:
- Theo cả hai hướng, người ta có thể kiểm soát tốc độ của thiết bị một cách trơn tru trong một phạm vi mở rộng
- Kỹ thuật này có khả năng phanh nội tại
- Các vôn-ampe phản kháng phía sau được cân bằng qua một bộ truyền động và động cơ đồng bộ được kích thích rộng rãi hoạt động như một bộ truyền động do đó sẽ có sự gia tăng trong hệ số công suất
- Khi có tải nhấp nháy, động cơ truyền động là động cơ cảm ứng có một bánh đà được sử dụng để giảm tải nhấp nháy xuống mức tối thiểu
Nhược điểm của kỹ thuật Ward Leonard là:
- Vì kỹ thuật này có một bộ động cơ và máy phát điện nên chi phí sẽ cao hơn
- Thiết bị này được thiết kế phức tạp và có trọng lượng quá nặng
- Cần thêm không gian để lắp đặt
- Yêu cầu bảo trì thường xuyên và nền móng không tiết kiệm chi phí
- Sẽ có những tổn thất lớn và do đó hiệu quả của hệ thống bị giảm
- Nhiều tiếng ồn được tạo ra
Và ứng dụng của phương pháp Ward Leonard là điều khiển trơn tru tốc độ trong động cơ DC. Một số ví dụ là tời kéo mỏ, nhà máy giấy, thang máy, nhà máy cán và cần trục.
Ngoài hai kỹ thuật này, kỹ thuật được sử dụng rộng rãi nhất là kiểm soát tốc độ của động cơ một chiều sử dụng PWM để đạt được điều khiển tốc độ của động cơ DC. PWM liên quan đến việc áp dụng các xung có độ rộng khác nhau vào trình điều khiển động cơ để điều khiển điện áp đặt vào động cơ. Phương pháp này được chứng minh là rất hiệu quả vì tổn thất điện năng được giữ ở mức tối thiểu và không liên quan đến việc sử dụng bất kỳ thiết bị phức tạp nào.

Phương pháp kiểm soát điện áp
Sơ đồ khối trên đại diện cho một bộ điều khiển tốc độ động cơ điện . Như được mô tả trong sơ đồ khối ở trên, một bộ vi điều khiển được sử dụng để cung cấp tín hiệu PWM đến trình điều khiển động cơ. Trình điều khiển động cơ là một IC L293D bao gồm các mạch cầu H để điều khiển động cơ.
PWM đạt được bằng cách thay đổi các xung được áp dụng cho chân kích hoạt của IC điều khiển động cơ để điều khiển điện áp đặt vào của động cơ. Sự biến đổi của các xung được thực hiện bởi bộ vi điều khiển, với tín hiệu đầu vào từ các nút nhấn. Ở đây, hai nút nhấn được cung cấp, mỗi nút để giảm và tăng chu kỳ hoạt động của xung.
Vì vậy, bài viết này đã giải thích chi tiết về các kỹ thuật điều khiển tốc độ động cơ DC khác nhau và cách điều khiển tốc độ là quan trọng nhất cần được quan sát. Hơn nữa, chúng tôi khuyên bạn nên biết về bộ điều khiển tốc độ động cơ một chiều 12v .