Trong bài này chúng ta sẽ tìm hiểu về động cơ bước. Chúng ta sẽ tìm hiểu động cơ bước là gì, cơ chế hoạt động cơ bản của nó, các loại động cơ bước, các chế độ bước và cuối cùng là ưu nhược điểm của nó.
Động cơ bước là gì?
Động cơ bước là động cơ không chổi than trục quay (rôto) của nó hoàn thành một vòng quay với một số bước xác định. Do tính chất bước của chuyển động quay, nó có tên là động cơ bước.

Động cơ bước cung cấp kiểm soát chính xác góc quay và tốc độ. Đây là một thiết kế vòng lặp mở, có nghĩa là không có cơ chế phản hồi nào được thực hiện để theo dõi vòng quay.
Nó có thể thay đổi tốc độ, thay đổi hướng quay và khóa vào một vị trí ngay lập tức. Số bước được xác định bằng số răng có trong rôto. Ví dụ: nếu một động cơ bước bao gồm 200 răng thì
360 (độ) / 200 (không có răng) = 1,8 độ
Vì vậy, mỗi bước sẽ là 1,8 độ. Động cơ bước được điều khiển bởi vi điều khiển và mạch điều khiển. Nó được sử dụng rộng rãi trong máy in laze, máy in 3D, ổ đĩa quang, robot, v.v.
Cơ chế hoạt động cơ bản:
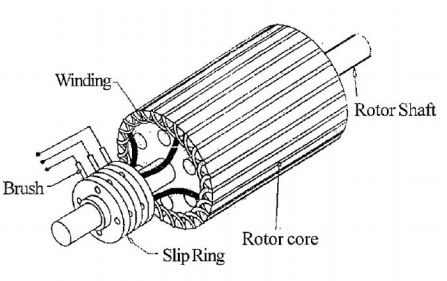
Động cơ bước có thể bao gồm một số cực được quấn bằng dây đồng cách điện gọi là stato hoặc phần không chuyển động của động cơ. Bộ phận chuyển động của động cơ được gọi là rôto, bao gồm một số răng.

Khi một cực được cung cấp năng lượng, các răng gần nhất sẽ thẳng hàng với cực được cung cấp năng lượng đó và răng khác trên rôto sẽ hơi lệch hoặc lệch với các cực không được cung cấp năng lượng khác.
Cực tiếp theo sẽ được cung cấp năng lượng và cực trước sẽ bị khử năng lượng, bây giờ các cực không được căn chỉnh sẽ được căn chỉnh với cực hiện đang được cấp năng lượng, điều này thực hiện một bước duy nhất.
Cực tiếp theo được cung cấp năng lượng và cực trước bị khử năng lượng, điều này tạo ra một bước khác và chu kỳ này tiếp tục nhiều lần để thực hiện một vòng quay hoàn toàn.
Đây là một ví dụ rất đơn giản khác về cách hoạt động của động cơ bước:

Nói chung, các răng rôto là các nam châm được sắp xếp theo kiểu Bắc cực và Nam cực xen kẽ. Giống như các cực đẩy và không giống như cực hút, bây giờ cuộn cực ‘A’ được cung cấp năng lượng và giả sử cực được cung cấp năng lượng là cực Bắc và rôto là cực Nam, điều này thu hút cực nam của rôto về phía stato cực ‘A’ như thể hiện trong hình ảnh.
Bây giờ cực A được khử năng lượng và cực ‘B’ được cung cấp năng lượng, bây giờ cực nam của rôto sẽ thẳng hàng với cực ‘B’. Cực ‘C’ và cực ‘D’ tương tự sẽ cung cấp năng lượng và khử năng lượng theo cùng một kiểu để hoàn thành một vòng quay.
Đến đây bạn đã hiểu cơ chế hoạt động của động cơ bước như thế nào.
Các loại động cơ bước:
Có ba loại động cơ bước:
• Bước nam châm vĩnh cửu
• Biến bước bất đắc dĩ
• Bước đồng bộ lai
Bước nam châm vĩnh viễn:
Động cơ bước nam châm vĩnh cửu sử dụng răng nam châm vĩnh cửu trong rôto được sắp xếp theo kiểu cực xoay chiều (Bắc-Nam-Bắc-Nam ……), điều này cung cấp mô-men xoắn lớn hơn.
Biến bước bất đắc dĩ:
Bước bất đắc dĩ có thể thay đổi sử dụng vật liệu sắt mềm làm rôto với nhiều răng và hoạt động dựa trên nguyên tắc rằng bất đắc dĩ tối thiểu xảy ra ở khe hở tối thiểu, có nghĩa là các răng gần nhất của rôto bị hút về phía cực khi nó được cung cấp năng lượng, giống như kim loại bị hút. về phía một nam châm.
Bước đồng bộ lai:
Trong động cơ bước lai cả hai phương pháp nêu trên được kết hợp để có được mô-men xoắn cực đại. Đây là loại động cơ bước phổ biến nhất và cũng là phương pháp đắt tiền.
Các chế độ bước:
Có 3 loại chế độ bước
• Chế độ bước đầy đủ
• Chế độ nửa bước
• Chế độ bước vi mô
Chế độ đầy đủ các bước:
Ở chế độ bước đầy đủ có thể được hiểu theo ví dụ sau: nếu động cơ bước có 200 răng thì một bước đầy đủ là 1,8 độ (được đưa ra ở đầu bài viết) nó sẽ không quay ít hơn hoặc nhiều hơn 1,8 độ.
Bước đầy đủ được phân loại thành hai loại:
• Chế độ một pha
• Chế độ hai pha
Ở cả hai chế độ pha, rôto thực hiện một bước đầy đủ, sự khác biệt cơ bản giữa hai chế độ này là, chế độ đơn cho mô-men xoắn ít hơn và chế độ hai pha cho nhiều mô-men xoắn hơn.
• Chế độ một pha:
Ở chế độ một pha chỉ có một pha (một nhóm dây quấn / cực) được cấp điện tại một thời điểm nhất định, đây là phương pháp tiêu thụ năng lượng ít nhất nhưng nó cũng cho ít mômen hơn.
• Chế độ hai pha:
Ở chế độ hai pha, hai pha (hai nhóm cuộn dây / cực) được cấp điện tại một thời điểm nhất định, nó tạo ra nhiều mô-men xoắn hơn (30% đến 40%) so với chế độ một pha.
Chế độ nửa bước:
Chế độ nửa bước được thực hiện để tăng gấp đôi độ phân giải của động cơ. Trong nửa bước như tên cho thấy, nó sẽ mất một nửa của một bước đầy đủ, thay vì 1,8 độ đầy đủ, nửa bước sẽ mất 0,9 độ.
Một nửa bước đạt được bằng cách thay đổi xen kẽ chế độ pha đơn và chế độ pha kép. Nó làm giảm căng thẳng trên các bộ phận cơ khí và tăng sự êm dịu khi quay. Nửa bước giảm mô-men xoắn khoảng 15%. Nhưng mô-men xoắn có thể được tăng lên bằng cách tăng dòng điện cấp cho động cơ.
Bước vi mô:
Bước micro được thực hiện để quay trơn tru nhất. Một bước đầy đủ được chia lên đến 256 bước. Đối với bước vi mô, nó cần bộ điều khiển bước nhỏ đặc biệt. Mô-men xoắn của nó được suy ra khoảng 30%.
Các trình điều khiển cần đầu vào sóng hình sin để quay chất lỏng. Các trình điều khiển cung cấp hai đầu vào hình sin với pha lệch pha 90 độ.
Nó giúp kiểm soát tốt nhất quá trình quay và giảm đáng kể ứng suất cơ học và giảm tiếng ồn khi vận hành.
Những ưu và nhược điểm chính của động cơ bước có thể được tìm hiểu với những điểm sau:
Ưu điểm:
• Kiểm soát tốt nhất xoay góc.
• Mômen xoắn cao ở tốc độ chậm.
• Thay đổi tức thì theo hướng quay.
• Cấu tạo cơ khí tối thiểu.
Nhược điểm:
• Công suất được tiêu thụ ngay cả khi không quay, điều này được thực hiện để khóa rôto vào vị trí cố định.
• Không có cơ chế phản hồi nào để sửa lỗi xoay và theo dõi vị trí hiện tại.
• Nó cần mạch điều khiển phức tạp.
• Mô-men xoắn giảm ở tốc độ cao hơn.
• Không dễ dàng điều khiển động cơ ở tốc độ cao hơn.
Trước: Những lầm tưởng lớn nhất về đèn LED chiếu sáng Tiếp theo: Tính toán thời gian sạc / xả tụ điện bằng cách sử dụng RC Constant