
Định nghĩa
Động cơ điện một chiều không chổi than bao gồm rôto ở dạng nam châm vĩnh cửu và stato ở dạng cuộn dây phần ứng nhiều pha. Nó khác với động cơ điện một chiều thông thường ở chỗ nó không chứa chổi than và quá trình chuyển mạch được thực hiện bằng điện, sử dụng bộ truyền động điện tử để cấp các cuộn dây stato.
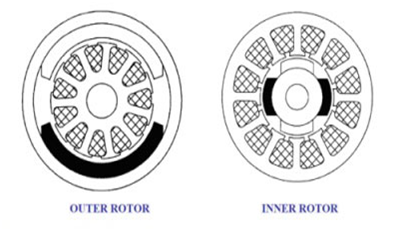
Về cơ bản, động cơ BLDC có thể được cấu tạo theo hai cách - bằng cách đặt rôto bên ngoài lõi và các cuộn dây trong lõi và cách khác bằng cách đặt các cuộn dây bên ngoài lõi. Theo cách sắp xếp trước đây, nam châm rôto hoạt động như một chất cách điện và giảm tốc độ tản nhiệt từ động cơ và hoạt động ở dòng điện thấp. Nó thường được sử dụng trong người hâm mộ. Trong cách sắp xếp thứ hai, động cơ tản nhiệt nhiều hơn, do đó làm tăng mô-men xoắn của nó. Nó được sử dụng trong ổ đĩa cứng.

BLDC
Hoạt động động cơ 4 cực 2 pha
Động cơ điện một chiều không chổi than được dẫn động bởi một bộ truyền động điện tử chuyển điện áp cung cấp giữa các cuộn dây stato khi rôto quay. Vị trí rôto được giám sát bởi bộ chuyển đổi (quang học hoặc từ tính) cung cấp thông tin cho bộ điều khiển điện tử và dựa vào vị trí này, cuộn dây stato được cấp điện được xác định. Ổ đĩa điện tử này bao gồm các bóng bán dẫn (2 cho mỗi pha) được vận hành thông qua một bộ vi xử lý.

BLDC-DC
Từ trường do nam châm vĩnh cửu tạo ra tương tác với trường do dòng điện trong cuộn dây stato tạo ra, tạo ra mômen cơ học. Mạch chuyển mạch điện tử hoặc biến tần chuyển dòng điện cung cấp đến stato để duy trì một góc không đổi từ 0 đến 90 độ giữa các trường tương tác. Cảm biến Hall chủ yếu được gắn trên stato hoặc trên rôto. Khi rôto đi qua cảm biến Hall, dựa trên cực Bắc hoặc Nam, nó tạo ra tín hiệu cao hoặc thấp. Dựa trên sự kết hợp của các tín hiệu này, cuộn dây được cung cấp năng lượng được xác định. Để giữ cho động cơ hoạt động, từ trường tạo ra bởi các cuộn dây phải dịch chuyển vị trí, khi rôto chuyển động để bắt kịp với trường stato.

Mạch
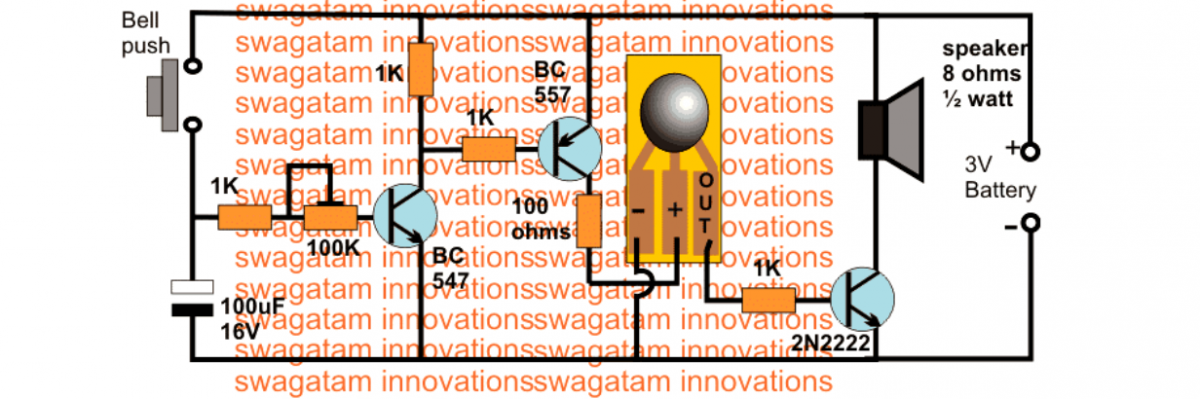
Trong động cơ một chiều không chổi than 4 cực, 2 pha, một cảm biến sảnh đơn được sử dụng, được nhúng trên stato. Khi cánh quạt quay, cảm biến Hall cảm nhận vị trí và phát tín hiệu cao hoặc thấp, tùy thuộc vào cực của nam châm (Bắc hoặc Nam). Cảm biến hội trường được kết nối thông qua một điện trở với các bóng bán dẫn. Khi tín hiệu điện áp cao xuất hiện ở đầu ra của cảm biến, bóng bán dẫn được nối với cuộn dây A bắt đầu dẫn điện, cung cấp đường dẫn cho dòng điện chạy qua và do đó cung cấp năng lượng cho cuộn dây A. Tụ điện bắt đầu sạc đến điện áp cung cấp đầy đủ. Khi cảm biến Hall phát hiện ra sự thay đổi cực tính của rôto, nó sẽ phát tín hiệu điện áp thấp ở đầu ra và vì bóng bán dẫn 1 không nhận được bất kỳ nguồn cung cấp nào nên nó đang ở trong tình trạng cắt. Điện áp phát triển xung quanh tụ điện là Vcc, là điện áp cung cấp cho 2ndbóng bán dẫn, và cuộn dây B bây giờ được cung cấp năng lượng, khi dòng điện chạy qua nó.
Động cơ BLDC có nam châm vĩnh cửu cố định, nam châm này quay và phần ứng cố định, loại bỏ các vấn đề kết nối dòng điện với phần ứng chuyển động. Và có thể có nhiều cực trên rôto hơn so với stato hoặc động cơ điện trở. Loại thứ hai có thể không có nam châm vĩnh cửu, chỉ là các cực được cảm ứng trên rôto sau đó được kéo vào một sự sắp xếp bằng các cuộn dây stato định thời. Bộ điều khiển điện tử thay thế cụm chổi than / cổ góp của động cơ DC có chổi than, liên tục chuyển pha cho các cuộn dây để giữ cho động cơ quay. Bộ điều khiển thực hiện phân phối điện theo thời gian so sánh bằng cách sử dụng mạch trạng thái rắn thay vì hệ thống chổi than / cổ góp.

Động cơ BLDC
7 Ưu điểm của Động cơ DC không chổi than
- Tốc độ tốt hơn so với đặc tính mô-men xoắn
- Phản ứng động cao
- Hiệu quả cao
- Tuổi thọ hoạt động lâu dài do không có tổn thất điện và ma sát
- Hoạt động không ồn ào
- Phạm vi tốc độ cao hơn
Các ứng dụng:
Giá thành của Động cơ DC không chổi than đã giảm kể từ khi được giới thiệu, vì những tiến bộ về vật liệu và thiết kế. Sự giảm chi phí này, cùng với nhiều tiêu điểm mà nó có so với Động cơ DC chổi than, làm cho Động cơ DC không chổi than trở thành một thành phần phổ biến trong nhiều ứng dụng đặc biệt. Các ứng dụng sử dụng Động cơ BLDC bao gồm, nhưng không bị ràng buộc:
- Điện tử dân dụng
- Vận chuyển
- Hệ thống sưởi và thông gió
- Kỹ thuật công nghiệp
- Kỹ thuật mô hình
Nguyên tắc làm việc
Nguyên tắc làm việc của động cơ BLDC giống như đối với động cơ DC có chổi than, tức là phản hồi vị trí trục bên trong. Trong trường hợp động cơ DC có chổi than, phản hồi được thực hiện bằng cách sử dụng cổ góp cơ khí và chổi than. Trong động cơ BLDC, nó đạt được bằng cách sử dụng nhiều cảm biến phản hồi. Trong động cơ BLDC, chúng tôi chủ yếu sử dụng cảm biến hiệu ứng Hall, bất cứ khi nào các cực từ của rôto đi qua gần cảm biến Hall, chúng tạo ra tín hiệu mức CAO hoặc THẤP, có thể được sử dụng để xác định vị trí của trục. Nếu hướng của từ trường bị đảo ngược, điện áp phát triển cũng sẽ ngược lại.
Điều khiển động cơ BLDC
Bộ điều khiển được thực hiện bằng vi điện tử có một số lựa chọn công nghệ cao. Điều này có thể được thực hiện bằng cách sử dụng bộ điều khiển vi mô, bộ điều khiển vi mô chuyên dụng, thiết bị vi điện tử có dây cứng, PLC hoặc các thiết bị tương tự khác.
Bộ điều khiển Analog vẫn đang sử dụng, nhưng không thể xử lý thông báo phản hồi và điều khiển tương ứng. Với loại mạch điều khiển này, có thể thực hiện các thuật toán điều khiển hiệu suất cao, chẳng hạn như điều khiển véc tơ, điều khiển hướng trường, điều khiển tốc độ cao tất cả đều liên quan đến trạng thái điện từ của động cơ. Hơn nữa, điều khiển vòng ngoài cho các yêu cầu động học khác nhau như điều khiển động cơ trượt, điều khiển thích ứng, điều khiển dự đoán ... vv cũng được thực hiện theo cách thông thường.
Bên cạnh tất cả những thứ này, chúng tôi còn tìm thấy PIC (Mạch tích hợp nguồn) hiệu suất cao, ASIC (Mạch tích hợp ứng dụng cụ thể)… vv. điều đó có thể đơn giản hóa rất nhiều việc xây dựng bộ điều khiển và khối điện tử công suất. Ví dụ, ngày nay chúng ta có bộ điều chỉnh PWM (Điều chế độ rộng xung) hoàn chỉnh trong một vi mạch duy nhất có thể thay thế toàn bộ khối điều khiển trong một số hệ thống. IC điều khiển phức hợp có thể cung cấp giải pháp hoàn chỉnh để điều khiển tất cả sáu công tắc nguồn trong bộ chuyển đổi ba pha. Có rất nhiều mạch tích hợp tương tự được bổ sung ngày càng nhiều. Vào cuối ngày, việc lắp ráp hệ thống có thể sẽ chỉ bao gồm một phần mềm điều khiển với tất cả phần cứng đều có hình dạng và hình thức phù hợp.
Sóng PWM (Điều chế độ rộng xung) có thể được sử dụng để điều khiển tốc độ của động cơ. Ở đây điện áp trung bình được đưa ra hoặc dòng điện trung bình chạy qua động cơ sẽ thay đổi tùy thuộc vào thời gian BẬT và TẮT của các xung điều khiển tốc độ của động cơ, tức là chu kỳ làm việc của sóng điều khiển tốc độ của nó. Khi thay đổi chu kỳ làm việc (thời gian BẬT), chúng ta có thể thay đổi tốc độ. Bằng cách hoán đổi các cổng đầu ra, nó sẽ thay đổi hướng của động cơ một cách hiệu quả.
Kiểm soát tốc độ
Điều khiển tốc độ của động cơ BLDC là điều cần thiết để làm cho động cơ hoạt động ở tốc độ mong muốn. Tốc độ của động cơ một chiều không chổi than có thể được kiểm soát bằng cách điều khiển điện áp một chiều đầu vào. Điện áp càng cao thì tốc độ càng lớn. Khi động cơ làm việc ở chế độ bình thường hoặc chạy dưới tốc độ định mức, điện áp đầu vào của phần ứng được thay đổi thông qua mô hình PWM. Khi một động cơ được làm việc trên tốc độ danh định, từ thông bị suy yếu do tăng dòng điện thoát ra.
Điều khiển tốc độ có thể là điều khiển tốc độ vòng kín hoặc vòng hở.
Điều khiển tốc độ vòng lặp mở - Nó chỉ liên quan đến việc điều khiển điện áp một chiều áp dụng cho các đầu nối động cơ bằng cách cắt điện áp một chiều. Tuy nhiên, điều này dẫn đến một số hình thức hạn chế hiện tại.
Kiểm soát tốc độ vòng lặp kín - Nó liên quan đến việc điều khiển điện áp cung cấp đầu vào thông qua phản hồi tốc độ từ động cơ. Do đó điện áp cung cấp được điều khiển phụ thuộc vào tín hiệu lỗi.
Điều khiển tốc độ vòng kín bao gồm ba thành phần cơ bản.
- Một mạch PWM để tạo ra các xung PWM cần thiết. Nó có thể là vi điều khiển hoặc IC hẹn giờ.
- Một thiết bị cảm biến để cảm nhận tốc độ động cơ thực tế. Nó có thể là cảm biến hiệu ứng hội trường, cảm biến hồng ngoại hoặc bộ mã hóa quang học.
- Một động cơ truyền động để điều khiển hoạt động của động cơ.
Kỹ thuật thay đổi điện áp cung cấp dựa trên tín hiệu lỗi này có thể thông qua kỹ thuật điều khiển pid hoặc sử dụng logic mờ.
Ứng dụng để điều khiển tốc độ của động cơ DC không chổi than

Điều khiển động cơ DC BLDC
Hoạt động của động cơ được điều khiển bằng cách sử dụng bộ ghép quang và bố trí MOSFET, nơi nguồn DC đầu vào được điều khiển thông qua kỹ thuật PWM từ bộ vi điều khiển. Khi động cơ quay, đèn led hồng ngoại có mặt ở trục của nó được chiếu sáng bằng ánh sáng trắng do sự hiện diện của một điểm trắng trên trục của nó và phản xạ ánh sáng hồng ngoại. Điốt quang nhận ánh sáng hồng ngoại này và trải qua sự thay đổi điện trở của nó, do đó gây ra sự thay đổi điện áp cung cấp cho bóng bán dẫn được kết nối và một xung được cấp cho bộ vi điều khiển để tạo ra số vòng quay mỗi phút. Tốc độ này được hiển thị trên màn hình LCD.
Tốc độ cần thiết được nhập vào bàn phím được giao tiếp với Bộ vi điều khiển. Sự khác biệt giữa tốc độ cảm nhận và tốc độ mong muốn là tín hiệu lỗi và bộ vi điều khiển tạo ra tín hiệu PWM theo tín hiệu lỗi, dựa trên logic mờ để cung cấp đầu vào nguồn một chiều cho động cơ.
Do đó bằng cách sử dụng điều khiển vòng kín, tốc độ của động cơ một chiều không chổi than có thể được kiểm soát và nó có thể quay ở bất kỳ tốc độ mong muốn nào.
Tín dụng Hình ảnh:






{kind=link}