Trong thế giới hiện đại, robot sẽ đóng một vai trò quan trọng . Mục đích chính của robot là giảm sức mạnh của con người. Các robot được sử dụng trong điện tử trong nhiều ứng dụng. Trong bài viết này, chúng tôi đã thảo luận về cách xây dựng một robot với mô-đun Arduino và vi điều khiển 8051. Để chế tạo một robot với Arduino, chúng tôi sẽ giải thích về robot arduino với khả năng tránh chướng ngại vật. Các thành phần yêu cầu bao gồm thân Robot, động cơ DC, cảm biến siêu âm, mô-đun Arduino, IC điều khiển động cơ và mô-đun Arduino
Làm thế nào để xây dựng một robot?
Các thành phần bắt buộc để chế tạo robot bao gồm những điều sau
Cơ thể Robot
Cơ thể robot cơ bản của robot tránh chướng ngại vật được hiển thị trong hình ảnh sau đây. Cơ thể robot là một cơ thể nhựa và nó có bánh xe ở cả hai bên. Phía trước thân robot được bố trí cảm biến siêu âm. Bằng cách sử dụng cảm biến siêu âm, chướng ngại vật có thể phát hiện. Khi robot đang di chuyển, nếu cảm biến siêu âm phát hiện chướng ngại vật nào thì robot sẽ di chuyển sang một bên và nó sẽ tiếp tục di chuyển.

Cơ thể Robot
Động cơ DC
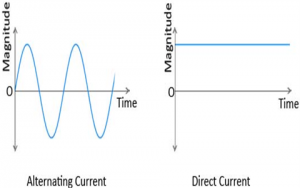
Các Động cơ DC là động cơ điện và nó chạy bằng dòng điện một chiều. Hoạt động của bất kỳ động cơ điện nào đều dựa trên điện từ trường. Từ trường do vật dẫn mang dòng điện tạo ra khi đặt nó trong từ trường ngoài, nó sẽ chịu một lực tỉ lệ với cường độ dòng điện trong vật dẫn, nói chung ta biết rằng các nam châm hút ngược cực từ bắc xuống nam và nếu các cực giống nhau như bắc tới bắc & nam xuống nam thì nam châm sẽ đẩy lùi.

Động cơ DC
Cấu hình bên trong của động cơ DC được thiết kế để gắn sự tương tác từ giữa vật dẫn dòng điện và từ trường bên ngoài để tạo ra chuyển động. Trong điều này, chúng tôi đang sử dụng hai động cơ DC, mỗi động cơ chứa 6v và tổng hai động cơ DC chứa 12v. Hai động cơ điện một chiều được đặt trong thân robot mà chúng ta có thể quan sát trong hình sau. Cơ thể robot được di chuyển với sự trợ giúp của động cơ DC

Cơ thể Robot với Động cơ DC
Mô-đun Arduino
Hình ảnh sau đây cho thấy hình ảnh mô-đun arduino. Các mô-đun arduino đóng một vai trò quan trọng trong việc thiết kế robot tránh chướng ngại vật sử dụng bộ arduino. Chân thu của arduino được kết nối với chân thứ hai của cảm biến siêu âm và chân thứ nhất, thứ 2 và thứ 3 của mô-đun arduino được kết nối với trình điều khiển động cơ DC. Các thành phần thông thường tụ điện và diode cũng được kết nối với mô-đun arduino với sự trợ giúp của bộ nguồn pin.

Mô-đun Arduino
IC điều khiển động cơ
Để chạy động cơ DC IC điều khiển động cơ đã sử dụng. Các chân 3,6 & 11, 14 của trình điều khiển động cơ được kết nối với động cơ DC. Chân đầu vào 1 và 2 được kết nối với mô-đun arduino và chân kích hoạt được kết nối với chân phát của arduino. Các chân 4, 5, 12, 13 của trình điều khiển động cơ được kết nối với đất.

IC điều khiển động cơ
Thiết bị cảm biến sóng siêu âm
Trong khái niệm này cảm biến siêu âm được sử dụng để phát hiện chướng ngại vật phía trước và nó sẽ gửi lệnh đến bảng arduino. Tùy thuộc vào tín hiệu đầu vào, bộ vi điều khiển chuyển hướng robot di chuyển theo các hướng thay thế.

Thiết bị cảm biến sóng siêu âm
Các ứng dụng tránh chướng ngại vật của robot arduino
- Robot arduino có thể di chuyển trên mọi bề mặt
- Nó có thể di chuyển trên bề mặt kim loại như thân tủ lạnh.
Hình ảnh dưới đây cho thấy robot arduino để tránh chướng ngại vật

Robot Arduino để tránh chướng ngại vật
Để chế tạo một robot với bộ vi điều khiển 8051 chúng tôi đang giải thích về phương tiện robot dò kim loại. Các thành phần cần thiết để chế tạo rô bốt với vi điều khiển 8051 là
- Vi điều khiển 8051
- Động cơ DC
- Người điều khiển động cơ
- Máy dò kim loại
- Người giải mã
- Mã hoá
- Nút ấn
- Pha lê
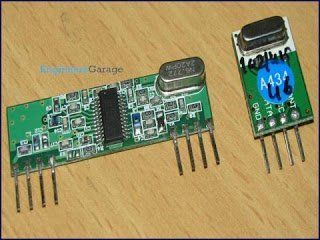
- Máy phát và máy thu RF
Máy dò kim loại
Các máy dò kim loại là một cuộn dây nó có một hoặc nhiều cuộn dây kim loại được sử dụng để phát hiện các kim loại trên mặt đất. Máy dò kim loại hoạt động dựa trên nguyên lý cảm ứng điện từ. Máy dò kim loại được kết nối với cơ thể robot thông qua PCB mà chúng ta có thể quan sát trong hình ảnh cuối cùng. Hình ảnh sau đây cho thấy máy dò kim loại thường được sử dụng trong các dự án điện tử.

Máy dò kim loại
Nút ấn
Nút nhấn là nút được làm bằng kim loại cứng như nhựa và kim loại. Nói chung, các nút ấn được sử dụng để đặt lại chương trình trong vi điều khiển. Hình ảnh sau đây cho thấy hình ảnh nút nhấn.

Nút ấn
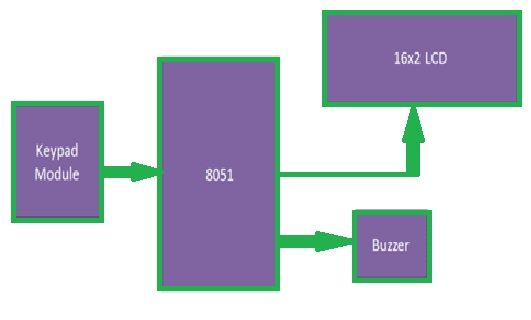
Bộ vi điều khiển 8051
Các Vi điều khiển 8051 bao gồm 40 chân . Chân thứ 4 & 5 của bộ vi điều khiển được kết nối với bộ dao động tinh thể. Chân Vcc được cấp cho nguồn 5V và chân nối đất được nối với đất. Các chân 15, 16, 18, 19 của vi điều khiển được kết nối với IC mã hóa của HT12E. Các chân 2, 7, 8, 9 của vi điều khiển được kết nối với các nút nhấn.
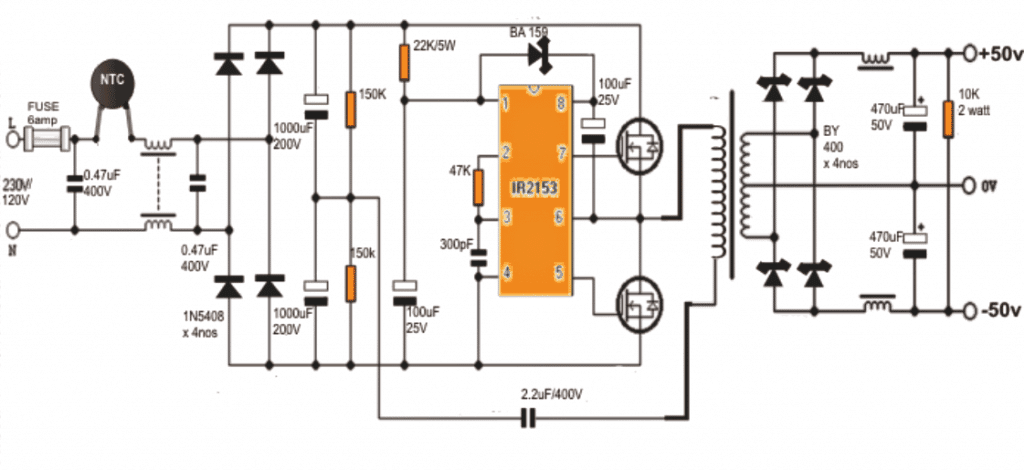
Hình ảnh sau khi kết nối tất cả các thành phần như điện trở, tụ điện, bộ dao động tinh thể, bộ vi điều khiển dòng 8051, bộ mã hóa, v.v. bảng mạch in .

Kết nối PCB
Hình ảnh dưới đây cho thấy robot dò kim loại với bộ vi điều khiển dòng 8051.

Robot dò kim loại với Bộ vi điều khiển dòng 8051
Trong bài viết này, chúng tôi đã thảo luận về Cách chế tạo rô bốt với Arduino và Vi điều khiển 8051 . Tôi hy vọng bằng cách đọc bài viết này, bạn đã có được một số kiến thức cơ bản để chế tạo một con robot. Nếu bạn có bất kỳ câu hỏi nào về bài viết này hoặc về thiết bị điện tử và dự án truyền thông , xin vui lòng bình luận trong phần dưới đây. Đây là câu hỏi dành cho bạn, Bộ vi điều khiển dòng 8051 là gì?
.