Trong bài đăng này, chúng ta sẽ tìm hiểu khái niệm hoạt động cơ bản của máy quét nhiệt hoặc nhiệt kế IR không tiếp xúc, đồng thời tìm hiểu cách tạo một nguyên mẫu DIY thực tế của thiết bị không có Arduino .
Trong thời kỳ hậu COVID-19, chứng kiến cảnh các bác sĩ cầm súng đo nhiệt độ không tiếp xúc và chĩa về phía trán của nghi phạm COVID-19 là cảnh thường thấy.
Thiết bị này thực chất là một thiết bị nhiệt kế ít tiếp xúc, phát hiện nhiệt độ tức thời của bề mặt cơ thể nghi phạm và cho phép bác sĩ biết người đó đang bình thường hay đang bị sốt?

Phương pháp thử nghiệm cơ bản
Trong quá trình thử nghiệm, chúng tôi phát hiện người có thẩm quyền đang chĩa tia laze từ súng bắn nhiệt độ không tiếp xúc lên trán của nghi phạm và ghi nhận nhiệt độ trên màn hình LCD phía sau của thiết bị.
Chùm tia laser thực sự không có kết nối trực tiếp với quy trình đo nhiệt độ. Nó chỉ được sử dụng để giúp bác sĩ đảm bảo rằng nhiệt kế hồng ngoại được nhắm chính xác vào vị trí lý tưởng của cơ thể để xác định thân nhiệt chủ yếu là chính xác.
Định luật Stefan – Boltzmann
Như định luật Stefan – Boltzmann đã nêu, tổng công suất bức xạ của vật thể MLà(T) tỷ lệ với lũy thừa thứ tư của nhiệt độ của nó, như thể hiện trong phương trình sau
MLà(T) = εσT4
Trong phương trình này, ε biểu thị độ phát xạ.
σ biểu thị hằng số Stefan-Boltzmann tương đương với đại lượng 5.67032 x 10-1212 Wcm-haiĐẾN-4, trong đó chữ K là đơn vị nhiệt độ tính bằng Kelvin.
Phương trình trên gợi ý rằng khi nhiệt độ của một cơ thể tăng lên, bức xạ hồng ngoại của nó cũng tăng theo tỷ lệ thuận. Bức xạ IR này có thể được đo từ xa mà không cần bất kỳ tiếp xúc vật lý nào. Bài đọc có thể cung cấp cho chúng ta mức nhiệt độ tức thời của cơ thể.
Cảm biến nào có thể áp dụng
Cảm biến phù hợp nhất và được sử dụng trong nhiệt kế không tiếp xúc là cảm biến nhiệt .
Cảm biến nhiệt chuyển đổi bản đồ nhiệt hồng ngoại tới từ một nguồn ở xa thành một lượng điện áp đầu ra điện áp nhỏ tỷ lệ thuận.
Nó hoạt động trên nguyên tắc cặp nhiệt điện, trong đó các kim loại khác nhau được ghép nối tiếp hoặc song song để tạo ra các điểm nối 'nóng' và 'lạnh'. Khi thông lượng bức xạ hồng ngoại từ một nguồn rơi vào nhiệt điện, nó tạo ra sự khác biệt về nhiệt độ trên các điểm nối này, tạo ra một lượng điện tương đương qua các đầu cuối của cặp nhiệt điện.
Công suất điện tỷ lệ với nguồn nhiệt này có thể được đo để xác định mức nhiệt độ từ nguồn cơ thể.
Cặp nhiệt điện bên trong cảm biến nhiệt dẻo được nhúng trên chip silicon giúp hệ thống cực kỳ nhạy và chính xác.
Sử dụng cảm biến nhiệt MLX90247
IC MLX90247 là một ví dụ tuyệt vời về thiết bị cảm biến nhiệt đa năng có thể được sử dụng lý tưởng để chế tạo thiết bị máy quét nhiệt hoặc thiết bị nhiệt kế không tiếp xúc.

IC MLX90247 được tạo thành từ mạng cặp nhiệt điện xếp chồng lên nhau trên bề mặt của màng.
Các nút tiếp nhận nhiệt của cặp nhiệt điện được định vị một cách chiến lược gần trung tâm của màng cơ sở, trong khi các điểm nối lạnh khác biệt được đặt ở rìa của thiết bị, tạo thành khu vực khối lượng lớn silicon của thiết bị.
Vì màng được thiết kế để dẫn nhiệt kém, nên nhiệt phát hiện được từ nguồn có thể tăng nhanh ở gần tâm ống dẫn hơn là cạnh lớn của thiết bị.
Do đó, sự khác biệt nhanh chóng của nhiệt có thể phát triển trên các đầu nối nhiệt điện gây ra tiềm năng điện hiệu dụng phát triển trên các đầu nối này thông qua nguyên lý nhiệt điện.
Phần tốt nhất của cảm biến nhiệt dẻo là, không giống như các IC tiêu chuẩn, nó không yêu cầu nguồn điện bên ngoài để hoạt động, thay vào đó nó tự tạo ra tiềm năng điện để cho phép đo được yêu cầu.
Bạn nhận được hai biến thể của IC MLX90247 như được hiển thị bên dưới, trong đó một biến thể cung cấp tùy chọn Vss mặt đất và biến thể còn lại không có chân Vss.

Tùy chọn trên cho phép đo lưỡng cực của nhiệt độ IR. Có nghĩa là đầu ra có thể hiển thị nhiệt độ cao hơn nhiệt độ môi trường xung quanh và cũng thấp hơn nhiệt độ môi trường xung quanh.
Tùy chọn thấp hơn có thể được sử dụng để đo nhiệt độ trên mức môi trường xung quanh hoặc thấp hơn mức môi trường xung quanh và do đó cho phép cơ sở đo lường đơn cực.
Tại sao nhiệt điện trở được sử dụng trong nhiệt điện
Trong IC MLX90247 ở trên, chúng ta có thể thấy một nhiệt điện trở được bao gồm trong gói thiết bị. Nhiệt điện trở đóng một vai trò quan trọng trong việc tạo ra đầu ra mức tham chiếu cho giai đoạn đơn vị đo bên ngoài.
Nhiệt điện trở được kết hợp để phát hiện nhiệt độ môi trường xung quanh hoặc nhiệt độ cơ thể của thiết bị. Mức nhiệt độ môi trường xung quanh này trở thành mức tham chiếu cho giai đoạn op amp đầu ra.
Miễn là nhiệt độ IR từ mục tiêu thấp hơn hoặc bằng mức tham chiếu này, tầng khuếch đại op amp bên ngoài không phản hồi và đầu ra của nó vẫn là 0 V.
Tuy nhiên, ngay sau khi bức xạ IR từ cơ thể vượt qua nhiệt độ môi trường xung quanh, amp op bắt đầu phản ứng để tạo ra đầu ra có thể đo hợp lệ tương ứng tuyến tính với sản lượng nhiệt tăng lên của cơ thể.
Mạch nhiệt kế không tiếp xúc sử dụng IC MLX90247 Cảm biến nhiệt

Trong mạch nguyên mẫu ở trên của mạch nhiệt kế IR không tiếp xúc, chúng tôi tìm thấy IC cảm biến nhiệt MLX90247 ở chế độ lưỡng cực, được cấu hình với một amp op bên ngoài được thiết kế để khuếch đại điện cực nhỏ từ nhiệt kế thành một đầu ra có thể đo được.
Op amp phía trên khuếch đại đầu ra cặp nhiệt điện từ IC MLX90247, trong khi op amp phía dưới khuếch đại nhiệt độ môi trường xung quanh của IC.
Một vi sai đơn giản Máy đo VU được gắn trên các đầu ra của hai op amps. Miễn là không có vật tỏa nhiệt phía trước nhiệt điện, nhiệt độ bên trong cặp nhiệt điện của nó vẫn bằng nhiệt độ nhiệt điện trở liền kề. Do đó, hai đầu ra op amp tạo ra lượng điện áp bằng nhau. Do đó, đồng hồ VU chỉ ra 0 V ở tâm mặt số của nó.
Trong trường hợp cơ thể người có nhiệt độ cao hơn nhiệt độ xung quanh được đưa vào trong phạm vi cảm biến của nhiệt điện tử, sản lượng cặp nhiệt của nó trên pin2 và pin4 bắt đầu tăng theo cấp số nhân và vượt quá đầu ra nhiệt điện trở trên pin3 và pin1.
Điều này dẫn đến việc amp op trên tạo ra điện áp dương hơn amp op dưới. Máy đo VU đáp ứng điều này và kim của nó bắt đầu dịch chuyển ở phía bên phải của hiệu chuẩn 0V. Số đọc hiển thị trực tiếp mức nhiệt độ của mục tiêu được phát hiện bởi nhiệt nhiệt.
Op Amp nào phù hợp với ứng dụng
Vì đầu ra từ nhiệt dẻo được cho là ở dạng microvolt, nên amp op được sử dụng để khuếch đại điện áp cực nhỏ này phải có độ nhạy cao và tinh vi, và với thông số kỹ thuật bù đầu vào rất thấp. Để đáp ứng các điều kiện, một amp op thiết bị đo lường dường như là sự lựa chọn tốt nhất cho ứng dụng này.
Mặc dù bạn có thể tìm thấy nhiều bộ khuếch đại thiết bị đo tốt trên mạng, nhưng INA333 Micro-Power (50μA), Zerø-Drift, Bộ khuếch đại thiết bị đầu ra đường sắt có vẻ là ứng cử viên thích hợp nhất.
Có nhiều tính năng tuyệt vời làm cho vi mạch này phù hợp nhất để khuếch đại điện áp cặp nhiệt điện thành một cường độ có thể đo được. Một mạch khuếch đại thiết bị đo đạc IC INA333 cơ bản có thể được nhìn thấy bên dưới và thiết kế này có thể được sử dụng để khuếch đại mạch nhiệt điện giải thích ở trên.

Trong mạch op amp INA333 này, điện trở RG xác định độ lợi của mạch và có thể được tính bằng công thức:
Tăng = 1 + 100 / RG
Kết quả đầu ra sẽ tính bằng kilo Ohms.
Thông qua công thức này, chúng ta có thể thiết lập hệ số khuếch đại tổng thể của mạch phụ thuộc vào mức microvolt nhận được từ nhiệt điện.
Độ lợi có thể được điều chỉnh ngay từ 0 đến 10.000, cung cấp cho amp op có khả năng khuếch đại ở mức đặc biệt cho các đầu vào microvolt.
Để có thể sử dụng bộ khuếch đại thiết bị đo này với IC nhiệt dẻo, chúng ta sẽ cần hai trong số các mô-đun op amp này. Một cái sẽ được sử dụng để khuếch đại đầu ra tín hiệu của cặp nhiệt điện và cái kia sẽ được sử dụng để khuếch đại đầu ra tín hiệu nhiệt điện trở, như hình dưới đây

Thiết lập có thể được sử dụng để tạo ra một nhiệt kế IR không tiếp xúc, nhiệt kế này sẽ tạo ra đầu ra tương tự tăng tuyến tính để đáp ứng với nhiệt IR tăng tuyến tính, như được phát hiện bởi nhiệt kế.
Đầu ra tương tự có thể được gắn vào máy đo VU milivolt hoặc máy đo mV kỹ thuật số để có được sự giải thích tức thì về mức nhiệt độ của cơ thể.
Đầu ra Vhoặc là cũng có thể được ước tính thông qua phương trình sau:
Vhoặc là = G ( Vtrong + - Vtrong- )
Danh sách các bộ phận
Các bộ phận sau đây sẽ là cần thiết để xây dựng mạch nhiệt kế đơn giản được giải thích ở trên:
- IC cảm biến nhiệt MLX90247 - 1no
- Máy đo Op amp INA333 - 2nos
- Vôn kế có dải từ 0 đến 1V FSD - 1no
- Tế bào Ni-Cd 1.2 V AAA để cấp nguồn cho INA333 - 2nos
Việc đọc vôn kế sẽ cần được hiệu chuẩn theo độ C, có thể được thực hiện bằng một số thử nghiệm và thử nghiệm và sai số.
Sử dụng PIR
Để bình thường Cảm biến PIR cũng hoạt động tốt và cung cấp một giải pháp thay thế rẻ cho các loại ứng dụng này.
PIR bao gồm một cảm biến dựa trên vật liệu nhiệt điện như TGS, BaTiO3, v.v., trải qua phân cực tự phát khi nó cảm nhận được sự thay đổi nhiệt độ trong phạm vi phát hiện của nó.
Điện tích phân cực trong thiết bị PIR được tạo ra do sự thay đổi nhiệt độ của nó phụ thuộc vào công suất chiếu xạ PhiLà được truyền bởi cơ thể trên cảm biến PIR. Điều này khiến đầu ra PIR tạo ra dòng điện Tôid ωpAd( Δ T) .
Thiết bị cũng tạo ra một điện áp Vhoặc là có thể bằng tích của dòng điện Tôid và trở kháng của thiết bị. Điều này có thể được biểu thị bằng phương trình sau:
Vhoặc là= TôidRd/ √1 + ωhaiRhaidChaid
Phương trình này có thể được sắp xếp hợp lý hơn nữa thành:
Vhoặc là= ωpAdRd( Δ T) / √1 + ωhaiRhaidChaid
trong đó p biểu thị hệ số nhiệt điện, ω biểu thị tần số radian, và Δ T bằng chênh lệch về nhiệt độ của đầu báo Td
và nhiệt độ môi trường xung quanh Tđến.
Bây giờ, bằng cách áp dụng phương trình cân bằng nhiệt, chúng ta thấy rằng giá trị của Δ T có thể được suy ra như biểu diễn trong phương trình sau:
Δ T = RTPhiLà/ √ (1 + ωhaiτhaiT)
Nếu chúng tôi thay thế giá trị này của Δ Trong phương trình trước, chúng tôi nhận được kết quả đại diện cho Vo với đặc tính dải thông, như hình dưới đây:

Ở đâu τLÀ đề cập đến hằng số thời gian điện ( RdCd ), τT chỉ ra
hằng số thời gian nhiệt ( RTCT ), và PhiLà tượng trưng cho sự rạng rỡ
nguồn từ mục tiêu được phát hiện bởi cảm biến.
Các thảo luận và phương trình trên chứng minh rằng điện áp đầu ra Vo từ PIR tỷ lệ thuận với công suất bức xạ phát ra từ nguồn, và do đó trở nên lý tưởng phù hợp cho các ứng dụng đo nhiệt độ không tiếp xúc.
Tuy nhiên, chúng tôi biết rằng PIR không thể phản hồi với nguồn IR văn phòng phẩm và yêu cầu nguồn phải hoạt động để cho phép đầu ra có thể đọc được.
Vì tốc độ di chuyển cũng ảnh hưởng đến dữ liệu đầu ra, chúng tôi phải đảm bảo rằng nguồn di chuyển với tốc độ chính xác, một khía cạnh có thể không thể thực hiện trên mục tiêu là con người.
Do đó, một cách dễ dàng để chống lại điều này là để mục tiêu là con người là văn phòng phẩm và tái tạo chuyển động của nó bằng cách giao diện máy cắt dựa trên động cơ với hệ thống thấu kính PIR.
Nguyên mẫu nhiệt kế không tiếp xúc sử dụng PIR
Các đoạn sau giải thích việc thiết lập thử nghiệm của một hệ thống máy quét nhiệt thực tế, có thể được áp dụng để xây dựng một nguyên mẫu thực tế, sau khi tối ưu hóa kỹ lưỡng các thông số liên quan khác nhau.
Như đã học trong phần trước, PIR được thiết kế để phát hiện bức xạ phát xạ dưới dạng tốc độ thay đổi nhiệt độ dT / dt và do đó chỉ phản ứng với nhiệt hồng ngoại phát xung với tần số được tính toán thích hợp.
Theo các thử nghiệm, người ta thấy rằng PIR hoạt động tốt nhất ở tần số xung khoảng 8 Hz, đạt được thông qua việc cắt tín hiệu đến ổn định thông qua bộ cắt servo
Về cơ bản, việc cắt các tín hiệu cho phép cảm biến PIR đánh giá và xuất ra công suất bức xạ của cơ thể khi điện áp tăng đột biến. Nếu tần số chopper được tối ưu hóa một cách chính xác thì giá trị trung bình của các xung này sẽ tỷ lệ thuận với cường độ của nhiệt độ bức xạ.
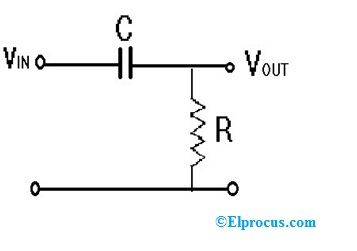
Hình ảnh sau đây cho thấy một thử nghiệm điển hình được thiết lập để tạo một đơn vị đo lường được tối ưu hóa hoặc MU.

Để đảm bảo hệ thống hoạt động hiệu quả, khoảng cách giữa nguồn IR và trường nhìn của cảm biến (FOV) phải trong khoảng 40 cm. Nói cách khác, thân bức xạ và thấu kính PIR phải cách nhau 40 cm.
Chúng ta cũng có thể thấy một hệ thống trực thăng bao gồm một động cơ bước nhỏ với một cánh quạt được lắp đặt giữa ống kính Fresnel và cảm biến nhiệt điện PIR.
Làm thế nào nó hoạt động
Bức xạ IR từ cơ thể đi qua thấu kính Fresnel, sau đó nó bị cắt ở tần số 8 Hz bởi động cơ chopper và bức xạ IR dạng xung kết quả được phát hiện bởi cảm biến PIR.
AC đầu ra tương đương với IR được phát hiện này sau đó được áp dụng cho giai đoạn 'điều hòa tín hiệu' được thực hiện với nhiều giai đoạn op amp.
Đầu ra được khuếch đại và điều hòa cuối cùng từ bộ điều hòa tín hiệu được phân tích trên máy hiện sóng để kiểm tra phản ứng của mạch đối với công suất bức xạ thay đổi của phần thân.
Tối ưu hóa PIR và Chopper
Để có được kết quả tốt nhất có thể, các tiêu chí sau phải được đảm bảo cho PIR và hiệp hội trực thăng.
Đĩa cắt hoặc các lưỡi dao phải được định vị để xoay giữa ống kính mới và cảm biến bên trong PIR.
Đường kính thấu kính của ống kính không được lớn hơn 10 mm.
Tiêu cự của ống kính nên vào khoảng 20 mm.
Xem xét thực tế rằng khu vực cảm biến điển hình của ĐẾNd 1,6 mm Phi và được cài đặt gần với tiêu cự của ống kính, trường nhìn hoặc FOV được tìm thấy là 4,58hoặc làsử dụng công thức sau:
FOV(nửa góc)≈ | vậy-1[(dS/ 2) / f] | = 2,29hoặc là
Trong phương trình này dS biểu thị đường kính có thể phát hiện được của cảm biến và f là tiêu cự của thấu kính.
Thông số kỹ thuật chopper Blade
Hiệu quả làm việc của nhiệt kế không tiếp xúc chủ yếu phụ thuộc vào cách phát xung tia hồng ngoại tới hệ thống chopper và

Trong máy cắt này, các kích thước sau phải được sử dụng:
Máy cắt phải có 4 lưỡi và đường kính Dc phải khoảng 80 mm. Nó phải được điều khiển thông qua một động cơ bước hoặc một mạch điều khiển PWM.
Tần số quay gần đúng phải vào khoảng 5 Hz đến 8 Hz để có hiệu suất tối ưu.
Thấu kính Fresnel PIR phải được đặt phía sau cảm biến nhiệt điện 16 mm, sao cho đường kính tín hiệu IR tới rơi trên thấu kính là khoảng 4 mm và đường kính này được cho là nhỏ hơn nhiều so với TW 'chiều rộng răng' của máy cắt đĩa.
Phần kết luận
Máy quét nhiệt không tiếp xúc hoặc nhiệt kế hồng ngoại là một thiết bị rất hữu ích cho phép đo nhiệt độ cơ thể con người từ xa mà không cần tiếp xúc vật lý.
Trái tim của thiết bị này là một cảm biến hồng ngoại phát hiện mức nhiệt dưới dạng thông lượng bức xạ của cơ thể và chuyển nó thành mức điện thế tương đương.
Hai loại cảm biến có thể được sử dụng cho mục đích này là cảm biến nhiệt và cảm biến nhiệt điện.
Mặc dù về mặt vật lý, cả hai đều có vẻ giống nhau, nhưng có một sự khác biệt rất lớn trong nguyên tắc hoạt động.
Nhiệt điện hoạt động theo nguyên tắc cơ bản của một cặp nhiệt điện và tạo ra một điện thế tỷ lệ với sự chênh lệch nhiệt độ trên các điểm nối cặp nhiệt điện của nó.
Cảm biến nhiệt điện thường được sử dụng trong cảm biến PIR, hoạt động bằng cách phát hiện sự thay đổi nhiệt độ của cơ thể khi cơ thể có nhiệt độ cao hơn nhiệt độ môi trường vượt qua trường quan sát của cảm biến. Sự thay đổi mức nhiệt độ này được chuyển đổi một lượng điện thế tỷ lệ ở đầu ra của nó
Thermopile là một thiết bị tuyến tính nên dễ dàng cấu hình và triển khai hơn nhiều trong tất cả các dạng ứng dụng quét nhiệt.
Người giới thiệu:
Bộ khuếch đại nhạc cụCảm biến nhiệt dẻo melexis
Nhiệt kế hồng ngoại
Một cặp: Mạch rửa tay tự động - Hoàn toàn không tiếp xúc Tiếp theo: Mạch đầu vào tín hiệu để khắc phục sự cố nhanh của tất cả các thiết bị âm thanh