Trong bài đăng này, chúng ta sẽ khám phá bảng dữ liệu của PIR hoặc Cảm biến xuyên tâm hồng ngoại nhiệt điện HC-SR501. Chúng ta sẽ hiểu cảm biến PIR được sử dụng cho mục đích gì? Các hoạt động kích hoạt cơ bản của nó, chi tiết kết nối pin, thông số kỹ thuật và cuối cùng chúng ta sẽ xem xét một số ứng dụng trong cuộc sống thực.
Chúng ta sẽ bắt đầu bằng cách tìm hiểu đơn vị cảm biến PIR thực tế được lắp đặt bên trong mô-đun PIR tiêu chuẩn và tìm hiểu các đặc điểm bên trong, chi tiết sơ đồ chân và các chi tiết làm việc bên trong của nó.

Cảm biến PIR là gì?
PIR là viết tắt của Pyroelectic Infrared Radial Sensor hoặc Passive Infrared Sensor. PIR là một cảm biến điện tử phát hiện những thay đổi trong ánh sáng hồng ngoại qua một khoảng cách nhất định và đưa ra tín hiệu điện ở đầu ra của nó để phản hồi lại tín hiệu IR được phát hiện. Nó có thể phát hiện bất kỳ đối tượng phát ra tia hồng ngoại nào như con người hoặc động vật nếu đó là phạm vi của cảm biến, hoặc di chuyển ra xa phạm vi hoặc di chuyển trong phạm vi của cảm biến.
Mô-đun cảm biến PIR có thể được chia thành hai phần là tinh thể nhạy cảm với tia hồng ngoại và mạch xử lý.
Hình minh họa của tinh thể nhạy cảm PIR:

Phần tối của kim loại nơi chứa tinh thể nhạy cảm IR, tinh thể nhạy cảm có thể phát hiện mức hồng ngoại trong môi trường xung quanh. Nó thực sự chứa hai cảm biến pyroelectic để phát hiện các vật thể chuyển động. Nếu một trong những tinh thể nhạy cảm phát hiện ra sự thay đổi trong tia hồng ngoại (tăng hoặc giảm) so với tinh thể nhạy cảm kia, thì đầu ra sẽ được kích hoạt.
Một cấu trúc nhựa hình vòm thường được đặt trên tinh thể nhạy cảm này, hoạt động như thấu kính để tập trung ánh sáng hồng ngoại vào các cảm biến.
Cách hoạt động của PIR
Hoạt động cảm biến của cảm biến hồng ngoại nhiệt điện dựa trên thuộc tính hoặc đặc tính chịu trách nhiệm thay đổi phân cực của vật liệu để phản ứng với sự thay đổi nhiệt độ.
Các cảm biến này sử dụng một cặp hoặc một cặp yếu tố cảm biến để cảm nhận tín hiệu IR theo hai bước, đảm bảo phát hiện một cách dễ dàng bằng cách hủy bỏ các biến thể nhiệt độ không mong muốn trong giai đoạn EMI hiện có. Quá trình cảm biến hai bước này cải thiện độ ổn định tổng thể của cảm biến và giúp phát hiện tín hiệu IR chỉ từ sự hiện diện của con người.
Khi con người hoặc nguồn IR liên quan di chuyển qua cảm biến PIR, bức xạ sẽ cắt vào cặp yếu tố cảm biến theo cách thay thế, kích hoạt đầu ra để tạo ra một cặp xung BẬT / TẮT hoặc xung cao và thấp, như được mô tả trong dạng sóng sau:

Mô phỏng Gif thô sau đây cho thấy cách một cảm biến PIR phản ứng với một con người đang di chuyển và phát triển một vài xung sắc nét ngắn trên các đầu ra của nó cho quá trình xử lý cần thiết hoặc kích hoạt giai đoạn chuyển tiếp được định cấu hình thích hợp

Bố cục bên trong của PIR
Hình dưới đây mô tả cách bố trí bên trong hoặc cấu hình bên trong cảm biến PIR tiêu chuẩn.

Ở bên trái, chúng ta có thể thấy một cặp yếu tố cảm biến IR được kết nối trong chuỗi. Đầu trên của loạt sản phẩm này được kết nối với cổng FET tích hợp hoạt động như một bộ khuếch đại tín hiệu IR nhỏ. Điện trở kéo xuống Rg cung cấp logic 0 ở chế độ chờ cần thiết cho FET để đảm bảo rằng nó luôn TẮT hoàn toàn trong trường hợp không có tín hiệu IR.
Khi một tín hiệu IR chuyển động được phát hiện bởi cặp phần tử cảm biến, nó tạo ra một cặp tín hiệu logic cao và thấp tương ứng như đã thảo luận ở trên:
Các xung này được khuếch đại một cách thích hợp bởi FET và được tái tạo tại chân đầu ra của nó để xử lý thêm bởi một mạch điện gắn liền.
Các giai đoạn EMI liên quan cùng với tụ điện cung cấp thêm khả năng lọc cho quy trình, để tạo ra một tập hợp các xung sạch tại chân đầu ra được chỉ định của PIR.
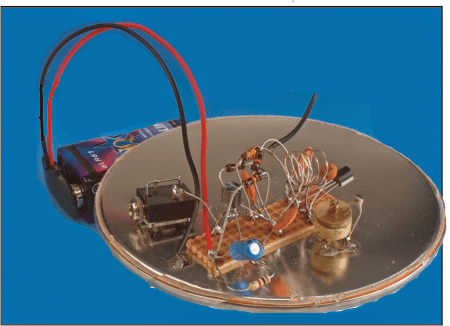
Thử nghiệm thiết lập cho cảm biến PIR
Hình ảnh sau đây cho thấy một thử nghiệm cảm biến PIR tiêu chuẩn được thiết lập. Đầu ra và chân Vss (chân âm) của PIR được nối với một điện trở kéo xuống bên ngoài, chân Vdd được cấp nguồn 5V.

Thân máy màu đen văn phòng phẩm tạo ra bức xạ hồng ngoại tương đương cần thiết cho cảm biến PIR thông qua cơ chế trực thăng. Tấm chopper lần lượt cắt các tín hiệu IR bắt chước mục tiêu IR đang chuyển động.
Tín hiệu IR cắt nhỏ này chạm vào cảm biến PIR tạo ra các xung được chỉ định trên chân đầu ra của nó, được khuếch đại một cách thích hợp thông qua một opamp để phân tích trên một phạm vi.
Các điều kiện kiểm tra lý tưởng cho thiết lập trên có thể được nhìn thấy dưới đây:

Cân bằng đầu ra Phần tử cảm biến
Vì cơ chế cảm biến kép được sử dụng trong PIR, cần đảm bảo rằng quá trình xử lý qua cặp thấu kính được cân bằng chính xác.
Các phần tử cảm biến được kiểm tra và cấu hình thích hợp bằng cách đánh giá điện áp đầu ra tín hiệu đơn tương ứng (SSOV) thông qua công thức sau:
Libra: | Va - Vb | / (Va + Vb) x 100%
Trong đó, Va = Độ nhạy của mặt A (đỉnh mV đến đỉnh)
Vb = Độ nhạy bên B (đỉnh mV đến đỉnh)
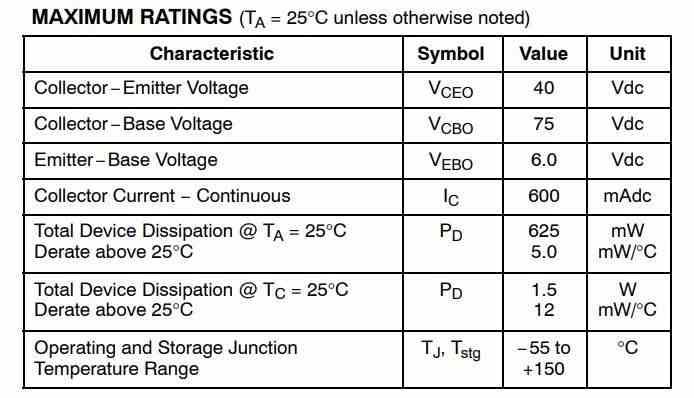
Thông số kỹ thuật chính
Các thông số kỹ thuật chính và thông số kích thước của cảm biến PIR có thể được tìm hiểu từ các chi tiết sau:

Sử dụng mô-đun PIR Inside
Hôm nay bạn sẽ thấy các mô-đun PIR có cảm biến PIR được tích hợp với mạch xử lý chuyên dụng và ống kính. Điều này nâng cao hiệu suất của PIR nhiều lần và cho phép người dùng cuối nhận được đầu ra khuếch đại, tối ưu hóa được xác định rõ ràng từ mô-đun.
Đầu ra này bây giờ chỉ cần được cấu hình với một giai đoạn chuyển tiếp để chuyển đổi BẬT / TẮT cần thiết của tải để đáp ứng với sự hiện diện của con người trong vùng quy định.
Mạch bên trong các mô-đun tiêu chuẩn bao gồm IC BISS0001 được thiết kế đặc biệt cho các ứng dụng phát hiện chuyển động. Hai núm được cung cấp, một núm để điều chỉnh độ nhạy của mô-đun và một núm khác để điều chỉnh thời lượng trong bao lâu đầu ra sẽ ở mức CAO sau khi mô-đun được kích hoạt.

Bây giờ chúng ta hãy tìm hiểu các chi tiết kỹ thuật của cảm biến PIR HC-SR501.
Điện áp hoạt động:
HC-SR501 là từ 5 V đến 20 V, tạo sự linh hoạt tuyệt vời cho các nhà thiết kế mạch.
Mức tiêu thụ hiện tại:
HC-SR501 là một thiết bị thân thiện với pin mức tiêu thụ hiện tại của nó là 65 mA khi nó phát hiện bất kỳ sự thay đổi nào trong ánh sáng hồng ngoại.
Điện áp đầu ra:
Khi mô-đun phát hiện chuyển động của tia hồng ngoại, đầu ra sẽ ở mức CAO ở 3,3 V, nếu mô-đun không phát hiện thấy chuyển động thì nó sẽ THẤP hoặc 0 V sau một khoảng thời gian cố định.
Thời gian trì hoãn:
Một núm được cung cấp để điều chỉnh thời gian cho đầu ra ở mức CAO sau khi phát hiện IR. Đây là khoảng thời gian có thể điều chỉnh từ 5 giây đến 5 phút.
Phạm vi nhạy cảm:
Góc của khu vực phát hiện là khoảng 110 độ hình nón. Một núm được đưa ra để điều chỉnh độ nhạy, chúng ta có thể thay đổi từ 3 mét đến 7 mét vuông góc với senor. Độ nhạy giảm khi chúng ta di chuyển hai bên của cảm biến.
Nhiệt độ hoạt động:
HC-SR501 có nhiệt độ hoạt động ấn tượng từ -15 đến +70 độ C.
Dòng điện tĩnh:
Dòng điện Quiescent là dòng điện tiêu thụ từ nguồn cung cấp, khi cảm biến không phát hiện bất kỳ chuyển động nào hoặc khi nó ở chế độ không tải. Nó tiêu thụ ít hơn 50 uA, làm cho pin cảm biến thân thiện.

Sơ đồ chân PIR và chế độ kích hoạt
Chế độ kích hoạt:
Mô-đun PIR có hai chế độ kích hoạt: Chế độ kích hoạt đơn / không lặp lại và kích hoạt lặp lại. Hai chế độ này có thể được truy cập bằng cách thay đổi vị trí jumper được cung cấp trong mô-đun.
Chế độ kích hoạt đơn / Chế độ không lặp lại:
Khi cảm biến PIR được đặt ở chế độ kích hoạt đơn (và núm hẹn giờ / thời gian trễ được đặt trong 5 giây (giả sử)), khi phát hiện có người, đầu ra sẽ chuyển sang CAO trong 5 giây và chuyển thành THẤP.
Chế độ kích hoạt lặp lại:
Khi cảm biến PIR được đặt ở chế độ kích hoạt lặp lại, khi phát hiện có người, đầu ra chuyển sang CAO, bộ hẹn giờ sẽ đếm trong 5 giây, nhưng khi phát hiện có người khác trong 5 giây đó, bộ hẹn giờ sẽ đặt lại về 0 và đếm thêm 5 giây sau giây con người được phát hiện.
Thời gian chặn:
Thời gian khối là khoảng thời gian mà cảm biến bị vô hiệu hóa hoặc sẽ không phát hiện chuyển động. Thời gian khối cho HC-
SR501 là 3 giây theo mặc định.
Điều này xảy ra sau khoảng thời gian trễ (được cài đặt bằng núm chỉnh giờ) đầu ra ở mức THẤP trong 3 giây trong khoảng thời gian này sẽ không có chuyển động nào được phát hiện. Sau 3 giây (THẤP), cảm biến sẽ sẵn sàng phát hiện lại chuyển động.
Nói cách khác, khi cảm biến phát hiện chuyển động, đầu ra sẽ ở mức CAO, đầu ra vẫn ở mức CAO theo núm hẹn giờ (ví dụ như 5 giây), sau 5 giây, cảm biến PIR chuyển sang THẤP, tín hiệu THẤP sẽ duy trì trong 3 giây bất kể mới. chuyển động nếu có.
Kích thước của mô-đun:
Cảm biến đủ nhỏ gọn để ẩn khỏi tầm nhìn của mọi người để không ảnh hưởng đến trang trí, v.v. Cảm biến này có kích thước 32 mm x 24 mm.
Kích thước ống kính:
Cấu trúc mái vòm màu trắng bao quanh cảm biến nhiệt điện được gọi là thấu kính Fresnel, giúp tăng phạm vi phát hiện và nó trông mờ đục. Nó có đường kính 23 mm.
Các ứng dụng:
• Hệ thống an ninh.
• Đèn tự động.
• Điều khiển Automaton công nghiệp.
• Cửa tự động.
Bạn có thể tìm thấy một số dự án sử dụng cảm biến PIR trong trang web này.
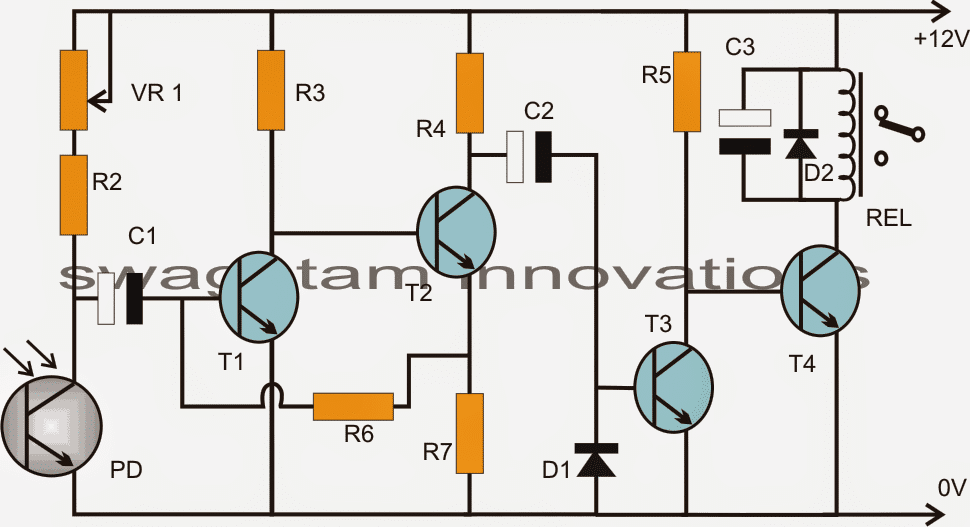
Mạch mô-đun PIR điển hình
Đối với những người đam mê có ý định xây dựng mô-đun PIR hoàn chỉnh cùng với cảm biến và bộ khuếch đại chính thức, sơ đồ tiêu chuẩn sau có thể được sử dụng và sử dụng cho bất kỳ ứng dụng dựa trên cảm biến PIR nào có liên quan.

Có thêm nghi ngờ hoặc câu hỏi? Vui lòng trình bày chúng thông qua khung bình luận bên dưới
Một cặp: Mạch biến tần Arduino Full-Bridge (H-Bridge) Tiếp theo: Mạch phát hiện tốc độ xe cho cảnh sát giao thông