
Để thiết lập giao tiếp không dây với một thiết bị từ xa, thông thường chúng ta sử dụng sóng vô tuyến, bức xạ quang học và đôi khi là sóng âm. Về cơ bản, các loại truyền thông không dây này thay đổi tần số của chúng. Tất cả các giao tiếp này có tần số thay đổi bắt đầu từ các băng tần như băng tần HF, LF, VHF, UHF, v.v. Bức xạ quang sử dụng phần hồng ngoại và phần nhìn thấy được của phổ sóng âm sử dụng phần siêu âm của phổ tần số và sóng micro và milimét được gọi là sóng vô tuyến.

Cảm biến hồng ngoại thụ động
Bức xạ hồng ngoại là phần của quang phổ điện từ có bước sóng nhỏ hơn vi sóng và dài hơn bước sóng ánh sáng nhìn thấy. Vùng hồng ngoại là từ 0,75um đến 1000umand, sóng IR quá nhỏ để có thể nhìn thấy bằng mắt người. Nếu vùng bước sóng từ 0,75um đến 3um - nó được gọi là vùng gần hồng ngoại, vùng từ 3um đến 6um được gọi là trung hồng ngoại và nếu vùng cao hơn 6um thì nó được gọi là vùng hồng ngoại xa.
Những bức xạ này đã được sử dụng rộng rãi trong các cảm biến và thiết bị điện tử khác nhau. Ngay từ điều khiển từ xa của TV đến các thiết bị phức tạp như thiết bị nhìn ban đêm đều sử dụng sóng IR. Phần sau đây thảo luận về Khái niệm cơ bản về cảm biến PIR và ứng dụng của nó .
Cảm biến hồng ngoại thụ động (PIR)
Thuật ngữ PIR là dạng viết tắt của PassiveInfra Red. Thuật ngữ “thụ động” chỉ ra rằng cảm biến không chủ động tham gia vào quá trình này, có nghĩa là, nó không tự phát ra các tín hiệu IR được giới thiệu, thay vì phát hiện một cách thụ động bức xạ hồng ngoại từ cơ thể người ở khu vực xung quanh.

Cảm biến PIR
Các bức xạ được phát hiện được chuyển thành điện tích, tỷ lệ với mức bức xạ phát hiện được. Sau đó, mức sạc này được cải thiện hơn nữa nhờ một FET tích hợp và được đưa vào chân đầu ra của thiết bị, có thể áp dụng cho mạch bên ngoài để kích hoạt và khuếch đại thêm các giai đoạn cảnh báo. Phạm vi cảm biến PIR lên đến 10 mét ở góc của + 15o hoặc -15o.
Hình ảnh bên dưới cho thấy cấu hình chân điển hình của cảm biến PIR, khá đơn giản để hiểu sơ đồ chân và người ta có thể dễ dàng sắp xếp chúng thành một mạch hoạt động với sự trợ giúp của các điểm sau:

Cấu hình chân của PIR
Cảm biến hồng ngoại thụ động bao gồm ba chân như được chỉ ra trong sơ đồ ở trên.
- Chân 1 tương ứng với đầu cuối cống của thiết bị, cần được kết nối với nguồn dương 5V DC.
- Pin2 tương ứng với đầu cuối nguồn của thiết bị, cần được kết nối với đầu cuối nối đất thông qua điện trở 100K hoặc 47K. Pin2 là chân đầu ra của cảm biến và tín hiệu IR được phát hiện được chuyển tiếp đến bộ khuếch đại từ chân 2 của cảm biến.
- Chân 3 của cảm biến được kết nối với đất.
Nguyên tắc hoạt động của cảm biến PIR
Cảm biến PIR phức tạp hơn các cảm biến khác vì chúng bao gồm hai khe. Các khe này được làm bằng vật liệu đặc biệt nhạy cảm với IR. Thấu kính Fresnel được sử dụng để thấy rằng hai khe của PIR có thể nhìn ra ngoài một khoảng cách nào đó. Khi cảm biến không hoạt động, hai khe cảm nhận cùng một lượng IR. Lượng môi trường xung quanh tỏa ra từ ngoài trời, tường hoặc phòng, v.v.
Khi cơ thể người hoặc bất kỳ động vật nào đi qua, nó sẽ chặn khe đầu tiên của cảm biến PIR. Điều này gây ra sự thay đổi chênh lệch dương giữa hai đường phân giác. Khi cơ thể người rời khỏi vùng cảm nhận, cảm biến tạo ra sự thay đổi chênh lệch âm giữa hai đường phân giác. Bản thân cảm biến hồng ngoại được đặt trong một kim loại kín để cải thiện độ ẩm / nhiệt độ / tiếng ồn / khả năng miễn nhiễm. Có một cửa sổ được làm bằng vật liệu silicon tráng thường để bảo vệ phần tử cảm biến.

Cảm biến PIR hoạt động
Mạch phát hiện chuyển động sử dụng cảm biến PIR
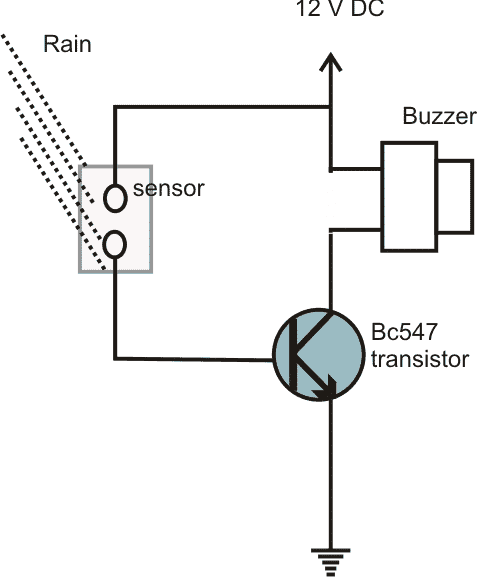
Trong phân đoạn trên, chúng ta đã tìm hiểu sơ lược về cảm biến PIR, bây giờ chúng ta hãy chuyển sang nghiên cứu một ứng dụng đơn giản của cảm biến PIR. Sơ đồ dưới đây mô tả một mạch cảm biến PIR dò chuyển động . Khi có năng lượng hoặc bức xạ IR của con người, cảm biến hồng ngoại sẽ phát hiện năng lượng và ngay lập tức chuyển nó thành các xung điện nhỏ, đủ để kích hoạt bóng bán dẫn BC547 dẫn và làm cho bộ thu của nó đi xuống thấp.

Mạch phát hiện chuyển động sử dụng cảm biến PIR
Là một bộ so sánh, IC741 được thiết lập –mà bao gồm 8 chân. Trong đó chân 3 được cấp phát làm đầu vào tham chiếu, còn Pin2 làm đầu vào cảm biến. Khi cực thu của bóng bán dẫn xuống thấp, khi đó chân điện thế 2 của IC trở nên thấp hơn chân điện thế 3. Ngay lập tức nó làm cho đầu ra của IC cao, kích hoạt trình điều khiển rơ le bao gồm một bóng bán dẫn và rơ le khác. Rơ le kích hoạt và chuyển mạch trên thiết bị cảnh báo, được kết nối với mạch điện.
Tụ điện 100uF / 25V đảm bảo rằng rơ le vẫn bật ngay cả sau khi cảm biến hồng ngoại thụ động bị tắt có thể do sự thoát ra của nguồn bức xạ. Thiết bị cảm biến PIR phải được bao bọc đúng cách trong một nắp ống kính Fresnel để đảm bảo rằng hiệu quả của nó được nâng cao một cách thích hợp.
Dự án dựa trên cảm biến PIR có tóm tắt
Bằng cách hiểu việc sử dụng và các hạn chế của cảm biến, đưa ra ý tưởng rõ ràng về việc phát triển các dự án. Các dự án cấp cao như SCADA, điều khiển logic mờ , thu thập dữ liệu thường thông qua những hệ thống nhúng và các dự án này yêu cầu kiến thức về miền phần mềm, đặc biệt là ngôn ngữ C. Dưới đây là thông tin chi tiết về một số dự án dựa trên cảm biến hồng ngoại thụ động với mô tả dưới đây.
Hệ thống mở cửa tự động dựa trên cảm biến PIR
Mục đích chính của dự án này là mở và đóng cửa, ở những nơi mà sự hiện diện của một người là bắt buộc - ví dụ: khách sạn, trung tâm mua sắm, rạp hát, v.v. dự án này bao gồm một cảm biến PIR cảm nhận sự hiện diện của cơ thể con người và gửi các xung đến Vi điều khiển 8051 . Bộ vi điều khiển này điều khiển trình điều khiển động cơ bằng cách gửi các xung phù hợp đến đầu vào của nó và cho phép các chân.
Hệ thống báo động an ninh dựa trên cảm biến PIR
Mục đích chính của dự án này là cung cấp bảo mật. Dự án này dựa trên cảm biến PIR với một mạch tích hợp tạo ra còi báo động. Cảm biến này cảm nhận bức xạ hồng ngoại được phát ra từ con người và sau đó đưa ra đầu ra kỹ thuật số. Đầu ra kỹ thuật số này được áp dụng cho vi mạch UM3561. Do đó, nó tạo ra âm thanh khi phát hiện bất kỳ cơ thể người nào. IC UM3561 là một IC ROM, tạo ra nhiều âm báo động như tiếng còi xe cứu hỏa, tiếng còi xe cứu thương, tiếng súng máy và tiếng còi cảnh sát.
Robot phát hiện con người sử dụng cảm biến PIR
Robot phát hiện con người sử dụng cảm biến PIR chủ yếu phát hiện con người và nó dựa trên Bộ vi điều khiển 8 bit . Một cảm biến hồng ngoại thụ động được sử dụng để phát hiện con người và dự án này chủ yếu được sử dụng để giải cứu những người mắc kẹt trong các mảnh vỡ trong trận động đất. Về cơ bản, nó đưa con người mắc kẹt dưới các mảnh vỡ lên bề mặt, từ đó cứu họ một cách hiệu quả.
Điều khiển động cơ bước dựa trên cảm biến PIR
Mục tiêu chính của dự án này là điều khiển động cơ bước sử dụng cảm biến PIR. Dự án này chủ yếu dựa trên công nghệ robot . Công nghệ này chủ yếu được sử dụng cho các ứng dụng tiên tiến. Trong dự án này, cảm biến PIR bên trong được sử dụng cho hiệu suất tuyệt vời- Cảm biến hồng ngoại được sử dụng trong hệ thống báo trộm , công tắc đèn, giám sát hiện diện của khách và rô bốt. Trong chế tạo robot, động cơ bước được sử dụng rộng rãi và chúng cho khả năng quay liên tục cũng như độ chính xác đáng kinh ngạc.
Vì vậy, tổng quan về các khái niệm cơ bản về cảm biến PIR và các ứng dụng của nó đã được thảo luận. Các cảm biến này được sử dụng trong nhiều ứng dụng như theo dõi thời gian thực bao gồm sức khỏe thể chất, hệ thống an ninh điện tử , v.v. Ngoài điều này, để được trợ giúp về chủ đề này hoặc ý tưởng dự án dựa trên cảm biến , bạn có thể liên hệ với chúng tôi bằng cách bình luận trong phần bình luận bên dưới.
Tín ảnh:









{kind=link}