Vi điều khiển là một chip đơn và nó được ký hiệu là μC hoặc uC. Công nghệ chế tạo được sử dụng cho bộ điều khiển của nó là VLSI. Tên thay thế của bộ vi điều khiển là bộ điều khiển nhúng. Hiện tại, có nhiều loại vi điều khiển khác nhau đang tồn tại trên thị trường như 4-bit, 8-bit, 64-bit và 128-bit. Nó là một máy vi tính nén được sử dụng để điều khiển các chức năng của hệ thống nhúng trong rô bốt, máy văn phòng, xe cơ giới, thiết bị gia dụng và các thiết bị điện tử khác. Các thành phần khác nhau được sử dụng trong vi điều khiển là bộ xử lý, thiết bị ngoại vi và bộ nhớ. Về cơ bản, chúng được sử dụng trong các thiết bị điện tử khác nhau đòi hỏi người vận hành thiết bị phải có một lượng điều khiển. Bài viết này thảo luận tổng quan về các loại vi điều khiển và hoạt động của chúng.
Vi điều khiển là gì?
Vi điều khiển là một máy tính nhỏ, chi phí thấp và khép kín trên chip có thể được sử dụng như một hệ thống nhúng. Một số bộ vi điều khiển có thể sử dụng các biểu thức bốn bit và hoạt động ở tần số tốc độ đồng hồ, thường bao gồm:
- Bộ vi xử lý 8 hoặc 16 bit.
- Một số đo nhỏ về RAM.
- ROM có thể lập trình và bộ nhớ flash.
- I / O song song và nối tiếp.
- Bộ định thời và bộ tạo tín hiệu.
- Chuyển đổi Analog sang Digital và Digital sang Analog
Các bộ vi điều khiển thường phải có yêu cầu năng lượng thấp vì nhiều thiết bị mà chúng điều khiển hoạt động bằng pin. Bộ vi điều khiển được sử dụng trong nhiều thiết bị điện tử tiêu dùng, động cơ xe hơi, thiết bị ngoại vi máy tính và thiết bị kiểm tra hoặc đo lường. Và những ứng dụng này rất phù hợp cho các ứng dụng sử dụng pin lâu. Phần chính của các bộ vi điều khiển đang được sử dụng ngày nay được cấy ghép vào các thiết bị khác.
Bộ vi điều khiển hoạt động
Chip vi điều khiển là một thiết bị tốc độ cao, nhưng so với máy tính thì nó chậm. Do đó, mỗi lệnh sẽ được thực thi trong bộ vi điều khiển với tốc độ nhanh chóng. Khi nguồn được BẬT, bộ dao động thạch anh sẽ được kích hoạt thông qua thanh ghi logic điều khiển. Trong vài giây, khi quá trình chuẩn bị ban đầu đang được phát triển, sau đó các tụ điện của ký sinh trùng sẽ được sạc.
Khi mức điện áp đạt được giá trị cao nhất và tần số của bộ dao động sẽ chuyển thành quá trình ổn định của việc ghi các bit qua các thanh ghi chức năng đặc biệt. Mọi thứ diễn ra dựa trên CLK của bộ dao động & điện tử tổng thể sẽ bắt đầu hoạt động. Tất cả điều này chỉ mất rất ít nano giây.
Chức năng chính của vi điều khiển là, nó có thể được coi như các hệ thống độc lập sử dụng bộ nhớ bộ xử lý. Các thiết bị ngoại vi của nó có thể được sử dụng như một Vi điều khiển 8051. Khi phần lớn các bộ vi điều khiển được sử dụng hiện nay được nhúng trong các loại máy móc khác như thiết bị điện thoại, ô tô và thiết bị ngoại vi hệ thống máy tính.
Khái niệm cơ bản về các loại vi điều khiển
Bất kỳ thiết bị điện nào được sử dụng để lưu trữ, đo lường và hiển thị thông tin về các phép đo khác đều bao gồm một con chip trong đó. Cấu trúc cơ bản của vi điều khiển bao gồm các thành phần khác nhau.
CPU
Vi điều khiển được gọi là thiết bị CPU, được sử dụng để mang & giải mã dữ liệu và cuối cùng hoàn thành nhiệm vụ được giao một cách hiệu quả. Bằng cách sử dụng bộ xử lý trung tâm, tất cả các thành phần vi điều khiển được kết nối với một hệ thống cụ thể. Lệnh được tìm nạp thông qua bộ nhớ lập trình có thể được giải mã thông qua CPU.
Ký ức
Trong vi điều khiển, chip nhớ hoạt động giống như một bộ vi xử lý vì nó lưu trữ tất cả dữ liệu cũng như các chương trình. Bộ vi điều khiển được thiết kế với một số lượng RAM / ROM / bộ nhớ flash để lưu mã nguồn chương trình.
Cổng I / O
Về cơ bản, các cổng này được sử dụng để giao tiếp với các thiết bị khác nhau như đèn LED, màn hình LCD, máy in, v.v.
Cổng nối tiếp
Cổng nối tiếp được sử dụng để cung cấp giao diện nối tiếp giữa vi điều khiển cũng như nhiều loại thiết bị ngoại vi khác như cổng song song.
Bộ hẹn giờ
Một bộ vi điều khiển bao gồm các bộ định thời nếu không thì các bộ đếm. Chúng được sử dụng để quản lý tất cả các hoạt động định thời và đếm trong một bộ vi điều khiển. Chức năng chính của bộ đếm là đếm xung bên ngoài trong khi các hoạt động được thực hiện thông qua bộ định thời là chức năng đồng hồ, tạo xung, điều chế, đo tần số, tạo dao động, v.v.
ADC (Bộ chuyển đổi tương tự sang kỹ thuật số)
ADC là từ viết tắt của bộ chuyển đổi tương tự sang kỹ thuật số. Chức năng chính của ADC là thay đổi tín hiệu từ tương tự sang kỹ thuật số. Đối với ADC, các tín hiệu đầu vào yêu cầu là tín hiệu tương tự và việc tạo ra tín hiệu kỹ thuật số được sử dụng trong các ứng dụng kỹ thuật số khác nhau như thiết bị đo lường
DAC (Bộ chuyển đổi kỹ thuật số sang tương tự)
Từ viết tắt của DAC là bộ chuyển đổi kỹ thuật số sang tương tự, được sử dụng để thực hiện các chức năng đảo ngược sang ADC. Nói chung, thiết bị này được sử dụng để quản lý các thiết bị tương tự như động cơ DC, v.v.
Kiểm soát phiên dịch
Bộ điều khiển này được sử dụng để cung cấp khả năng kiểm soát bị trì hoãn cho một chương trình đang chạy & việc giải thích là nội bộ hoặc bên ngoài.
Khối chức năng đặc biệt
Một số vi điều khiển đặc biệt được thiết kế cho các thiết bị đặc biệt như rô bốt, hệ thống vũ trụ bao gồm một khối chức năng đặc biệt. Khối này có các cổng phụ để thực hiện một số hoạt động cụ thể.
Các loại vi điều khiển được phân loại như thế nào?
Các bộ vi điều khiển được đặc trưng bởi chiều rộng bus, tập lệnh và cấu trúc bộ nhớ. Đối với cùng một họ, có thể có các hình thức khác nhau với các nguồn khác nhau. Bài viết này sẽ mô tả một số loại vi điều khiển cơ bản mà người dùng mới có thể chưa biết.
Các loại vi điều khiển được thể hiện trong hình, chúng được đặc trưng bởi các bit, kiến trúc bộ nhớ, bộ nhớ / thiết bị và tập lệnh. Hãy thảo luận ngắn gọn về nó.

Các loại vi điều khiển
Các loại vi điều khiển theo số lượng bit
Các bit trong vi điều khiển là vi điều khiển 8 bit, 16 bit và 32 bit.
Trong một 8 bit vi điều khiển, điểm khi bus nội bộ là 8-bit thì ALU sẽ thực hiện các phép toán số học và logic. Ví dụ về vi điều khiển 8-bit là họ Intel 8031/8051, PIC1x và Motorola MC68HC11.
Các 16-bit vi điều khiển thực hiện độ chính xác và hiệu suất cao hơn so với 8-bit. Ví dụ, vi điều khiển 8 bit chỉ có thể sử dụng 8 bit, dẫn đến phạm vi cuối cùng là 0 × 00 - 0xFF (0-255) cho mỗi chu kỳ. Ngược lại, bộ vi điều khiển 16 bit với độ rộng dữ liệu bit của chúng có phạm vi từ 0 × 0000 - 0xFFFF (0-65535) cho mỗi chu kỳ.
Giá trị cao nhất của bộ hẹn giờ dài hơn có thể tỏ ra hữu ích trong các ứng dụng và mạch nhất định. Nó có thể tự động hoạt động trên hai số 16 bit. Một số ví dụ về vi điều khiển 16 bit là MCU 16 bit là các họ 8051XA, PIC2x, Intel 8096 và Motorola MC68HC12 mở rộng.
Các 32-bit vi điều khiển sử dụng các lệnh 32-bit để thực hiện các phép toán số học và logic. Chúng được sử dụng trong các thiết bị được điều khiển tự động bao gồm thiết bị y tế cấy ghép, hệ thống điều khiển động cơ, máy văn phòng, thiết bị gia dụng và các loại hệ thống nhúng khác. Một số ví dụ là dòng Intel / Atmel 251, PIC3x.
Các loại vi điều khiển theo thiết bị bộ nhớ
Thiết bị nhớ được chia thành hai loại, chúng
- Bộ vi điều khiển bộ nhớ nhúng
- Bộ vi điều khiển bộ nhớ ngoài
Bộ vi điều khiển bộ nhớ nhúng : Khi một hệ thống nhúng có một bộ vi điều khiển có tất cả các khối chức năng có sẵn trên một con chip được gọi là bộ vi điều khiển nhúng. Ví dụ, 8051 có bộ nhớ chương trình & dữ liệu, cổng I / O, giao tiếp nối tiếp, bộ đếm và bộ định thời và ngắt trên chip là một vi điều khiển nhúng.
Bộ vi điều khiển bộ nhớ ngoài : Khi một hệ thống nhúng có một bộ vi điều khiển không có tất cả các khối chức năng có sẵn trên một chip được gọi là bộ vi điều khiển bộ nhớ ngoài. Ví dụ, 8031 không có bộ nhớ chương trình trên chip là vi điều khiển bộ nhớ ngoài.
Các loại vi điều khiển theo bộ hướng dẫn
CISC : CISC là Máy tính Tập hợp lệnh phức tạp. Nó cho phép người lập trình sử dụng một lệnh thay cho nhiều lệnh đơn giản hơn.
RỦI RO : RISC là viết tắt của Reduce Instruction set Computer, loại tập lệnh này làm giảm thiết kế của bộ vi xử lý cho các tiêu chuẩn công nghiệp. Nó cho phép mỗi lệnh hoạt động trên bất kỳ thanh ghi nào hoặc sử dụng bất kỳ chế độ định địa chỉ nào và truy cập đồng thời chương trình và dữ liệu.
Ví dụ cho CISC và RISC
| CISC : | Mov AX, 4 | RỦI RO : | Mov AX, 0 | |
| Mov BX, 2 | Mov BX, 4 | |||
| THÊM BX, AX | Mov CX, 2 | |||
| Bắt đầu | THÊM AX, BX | |||
| Vòng | Bắt đầu |
Từ ví dụ trên, hệ thống RISC rút ngắn thời gian thực thi bằng cách giảm chu kỳ xung nhịp cho mỗi lệnh và hệ thống CISC rút ngắn thời gian thực thi bằng cách giảm số lượng lệnh trên mỗi chương trình. RISC cho phép thực thi tốt hơn CISC.
Các loại vi điều khiển theo kiến trúc bộ nhớ
Kiến trúc bộ nhớ của vi điều khiển có hai loại, chúng là:
- Vi điều khiển kiến trúc bộ nhớ Harvard
- Bộ vi điều khiển kiến trúc bộ nhớ Princeton
Vi điều khiển kiến trúc bộ nhớ Harvard : Điểm khi bộ vi điều khiển có không gian địa chỉ bộ nhớ khác nhau cho chương trình và bộ nhớ dữ liệu, bộ vi điều khiển có kiến trúc bộ nhớ Harvard trong bộ xử lý.
Bộ vi điều khiển kiến trúc bộ nhớ Princeton : Điểm khi vi điều khiển có địa chỉ bộ nhớ chung cho bộ nhớ chương trình và bộ nhớ dữ liệu, vi điều khiển có kiến trúc bộ nhớ Princeton trong bộ xử lý.
Các loại vi điều khiển
Có các loại vi điều khiển khác nhau như 8051, PIC, AVR, ARM,
Vi điều khiển 8051
Nó là một vi điều khiển 40pin với Vcc là 5V kết nối với chân 40 và Vss ở chân 20 được giữ 0V. Và có các cổng đầu vào và đầu ra từ P1.0 - P1.7 và có tính năng mở cống. Port3 có các tính năng bổ sung. Pin36 có điều kiện thoát mở và chân17 có bóng bán dẫn được kéo lên bên trong bộ vi điều khiển.
Khi chúng ta áp dụng logic 1 tại port1 thì chúng ta nhận được logic 1 tại port21 và ngược lại. Việc lập trình vi điều khiển rất phức tạp. Về cơ bản, chúng tôi viết một chương trình bằng ngôn ngữ C, sau đó sẽ được chuyển đổi sang ngôn ngữ máy mà vi điều khiển hiểu được.
Chân ĐẶT LẠI được kết nối với chân9, được kết nối với một tụ điện. Khi công tắc BẬT, tụ điện bắt đầu sạc và RST ở mức cao. Việc áp dụng mức cao cho chân đặt lại sẽ đặt lại bộ vi điều khiển. Nếu chúng ta áp dụng logic zero cho chân này, chương trình sẽ bắt đầu thực hiện từ đầu.
Kiến trúc bộ nhớ của 8051
Bộ nhớ của 8051 được chia thành hai phần. Chúng là Bộ nhớ chương trình và Bộ nhớ dữ liệu. Bộ nhớ chương trình lưu trữ chương trình đang được thực thi trong khi bộ nhớ dữ liệu lưu trữ tạm thời dữ liệu và kết quả. 8051 đã được sử dụng trong nhiều loại thiết bị, chủ yếu là vì nó dễ tích hợp vào một thiết bị. Bộ vi điều khiển chủ yếu được sử dụng trong quản lý năng lượng, màn hình cảm ứng, ô tô và thiết bị y tế.

Bộ nhớ chương trình của 8051
Và

Bộ nhớ dữ liệu của 8051
Mô tả chân của Vi điều khiển 8051
Pin-40: Vcc là nguồn điện chính của + 5V DC.
Chốt 20: Vss - nó đại diện cho kết nối đất (0 V).
Các chân 32-39: Được gọi là Cổng 0 (P0.0 đến P0.7) để phục vụ như các cổng I / O.
Pin-31: Address Latch Enable (ALE) được sử dụng để phân kênh tín hiệu dữ liệu địa chỉ của cổng 0.
Pin-30: (EA) Đầu vào Access bên ngoài được sử dụng để bật hoặc tắt giao diện bộ nhớ ngoài. Nếu không có yêu cầu bộ nhớ ngoài, chân này luôn được giữ ở mức cao.
Pin- 29: Program Store Enable (PSEN) được sử dụng để đọc tín hiệu từ bộ nhớ chương trình bên ngoài.
Ghim- 21-28: Được gọi là Cổng 2 (P 2.0 đến P 2.7) - ngoài việc phục vụ như cổng I / O, các tín hiệu bus địa chỉ bậc cao hơn được ghép với cổng bán định hướng này.
Các chân 18 và 19: Được sử dụng để giao tiếp với một tinh thể bên ngoài để cung cấp đồng hồ hệ thống.
Các chân 10 - 17: Cổng này cũng phục vụ một số chức năng khác như ngắt, ngõ vào bộ định thời, tín hiệu điều khiển cho giao tiếp bộ nhớ ngoài Đọc và Ghi. Đây là một cổng hai chiều gần như có khả năng kéo lên bên trong.
Pin 9: Nó là một chân ĐẶT LẠI, được sử dụng để đặt các bộ vi điều khiển 8051 về các giá trị ban đầu của nó, trong khi bộ vi điều khiển đang hoạt động hoặc khi bắt đầu ứng dụng ban đầu. Chân RESET phải được đặt ở mức cao trong 2 chu kỳ máy.
Các chân 1 - 8: Cổng này không phục vụ bất kỳ chức năng nào khác. Cổng 1 là cổng I / O bán định hướng.
Vi điều khiển Renesas
Renesas là dòng vi điều khiển ô tô mới nhất cung cấp các tính năng hiệu suất cao với mức tiêu thụ điện năng đặc biệt thấp trên phạm vi rộng và linh hoạt của các hạng mục. Bộ vi điều khiển này cung cấp chức năng bảo mật phong phú và các đặc tính an toàn nhúng cần thiết cho các ứng dụng ô tô mới và tiên tiến. Cấu trúc cốt lõi của CPU vi điều khiển hỗ trợ các yêu cầu về độ tin cậy và hiệu suất cao.
Dạng đầy đủ của vi điều khiển RENESAS là “Chất bán dẫn thời Phục hưng cho các giải pháp nâng cao”. Các bộ vi điều khiển này cung cấp hiệu suất tốt nhất cho bộ vi xử lý cũng như bộ vi điều khiển có các tính năng hiệu suất tốt cùng với việc sử dụng năng lượng rất thấp cũng như đóng gói chắc chắn.
Bộ vi điều khiển này có dung lượng bộ nhớ lớn cũng như sơ đồ chân, vì vậy chúng được sử dụng trong các ứng dụng điều khiển ô tô khác nhau. Các họ vi điều khiển phổ biến nhất là RX cũng như RL78 do hiệu suất cao của chúng. Các tính năng chính của RENESAS RL78, cũng như các bộ vi điều khiển dựa trên họ RX, bao gồm những điều sau.
- Kiến trúc được sử dụng trong vi điều khiển này là kiến trúc CISC Harvard cho hiệu suất cao.
- Họ RL78 có thể truy cập được trong vi điều khiển 8 bit và 16 bit trong khi họ RX là vi điều khiển 32 bit.
- Bộ vi điều khiển họ RL78 là một bộ vi điều khiển công suất thấp trong khi họ RX cung cấp hiệu suất cũng như hiệu suất cao.
- Bộ vi điều khiển Dòng RL78 có sẵn từ 20 chân đến 128 chân trong khi họ RX có sẵn trong một bộ vi điều khiển 48 chân với gói 176 chân.
- Đối với vi điều khiển RL78, bộ nhớ flash nằm trong khoảng từ 16KB đến 512KB trong khi đối với họ RX, nó là 2MB.
- Bộ nhớ RAM của vi điều khiển họ RX nằm trong khoảng từ 2KB đến 128KB.
- Bộ vi điều khiển Renesas cung cấp năng lượng thấp, hiệu suất cao, gói nhỏ gọn và phạm vi kích thước bộ nhớ lớn nhất kết hợp cùng với các thiết bị ngoại vi phong phú về đặc tính.

Bộ vi điều khiển Renesas
- Renesas cung cấp các dòng vi điều khiển linh hoạt nhất trên thế giới, chẳng hạn như dòng RX của chúng tôi cung cấp nhiều loại thiết bị với các biến thể bộ nhớ từ 32K flash / RAM 4K đến RAM 8M flash / 512K đáng kinh ngạc.
- Dòng vi điều khiển 32 bit RX là một MCU đa năng, đa năng bao gồm một loạt các ứng dụng điều khiển nhúng với kết nối tốc độ cao, xử lý tín hiệu kỹ thuật số và điều khiển biến tần.
- Họ vi điều khiển RX sử dụng kiến trúc Harvard CISC nâng cao 32 bit để đạt được hiệu suất rất cao.
Ghim Mô tả
Cách sắp xếp chân của vi điều khiển Renesas được thể hiện trong hình:

Sơ đồ chân của vi điều khiển Renesas
Nó là một vi điều khiển 20 chân. Chân 9 là Vss, chân nối đất, và Vdd, chân cấp nguồn. Nó có ba loại ngắt khác nhau, đó là ngắt thông thường, ngắt nhanh, ngắt tốc độ cao.
Ngắt bình thường lưu trữ các thanh ghi quan trọng trên ngăn xếp bằng cách sử dụng các lệnh đẩy và bật. Các ngắt nhanh được lưu trữ tự động bộ đếm chương trình và từ trạng thái bộ xử lý trong các thanh ghi sao lưu đặc biệt, do đó thời gian phản hồi nhanh hơn. Và ngắt tốc độ cao phân bổ tối đa bốn thanh ghi chung để sử dụng riêng bởi ngắt để mở rộng tốc độ hơn nữa.
Cấu trúc bus nội bộ cung cấp 5 bus nội bộ để đảm bảo việc xử lý dữ liệu không bị chậm lại. Tìm nạp lệnh diễn ra thông qua một bus 64 bit rộng, do đó các lệnh có độ dài thay đổi được sử dụng trong kiến trúc CISC.
Các tính năng và lợi ích của vi điều khiển RX
- Tiêu thụ điện năng thấp được thực hiện bằng công nghệ đa lõi
- Hỗ trợ hoạt động 5V cho các thiết kế công nghiệp và thiết bị
- Khả năng mở rộng từ 48 đến 145 chân và từ 32KB đến 1MB bộ nhớ flash, với 8KB bộ nhớ flash dữ liệu bao gồm
- Tính năng an toàn tích hợp
- Một bộ chức năng phong phú tích hợp gồm 7 UART, I2C, 8 SPI, bộ so sánh, 12 bit ADC, 10 bit DAC và 24 bit ADC (RX21A), sẽ giảm chi phí hệ thống bằng cách tích hợp hầu hết các chức năng
Ứng dụng của Vi điều khiển Renesas
- Tự động trong công nghiệp
- Ứng dụng giao tiếp
- Ứng dụng điều khiển động cơ
- Kiểm tra và đo lường
- Ứng dụng y tế
Bộ vi điều khiển AVR
Vi điều khiển AVR được phát triển bởi Alf-Egil Bogen và Vegard Wollan từ Atmel Corporation. Các bộ vi điều khiển AVR được sửa đổi kiến trúc RISC Harvard với các bộ nhớ riêng biệt cho dữ liệu và chương trình và tốc độ của AVR cao khi so sánh với 8051 và PIC. AVR là viết tắt của ĐẾN lf-Egil Bogen và V egard Wollan’s R Bộ xử lý ISC.

Bộ vi điều khiển Atmel AVR
Sự khác biệt giữa Bộ điều khiển 8051 và AVR
- 8051 là bộ điều khiển 8 bit dựa trên kiến trúc CISC, AVR là bộ điều khiển 8 bit dựa trên kiến trúc RISC
- 8051 tiêu thụ nhiều năng lượng hơn vi điều khiển AVR
- Trong 8051, chúng ta có thể lập trình dễ dàng hơn vi điều khiển AVR
- Tốc độ của AVR hơn vi điều khiển 8051
Phân loại bộ điều khiển AVR
Bộ vi điều khiển AVR được phân thành ba loại:
- TinyAVR - Bộ nhớ ít hơn, kích thước nhỏ, chỉ thích hợp cho các ứng dụng đơn giản hơn
- MegaAVR - Đây là những loại phổ biến nhất có dung lượng bộ nhớ tốt (lên đến 256 KB), số lượng thiết bị ngoại vi tích hợp cao hơn và phù hợp với các ứng dụng vừa phải đến phức tạp
- XmegaAVR - Được sử dụng thương mại cho các ứng dụng phức tạp, đòi hỏi bộ nhớ chương trình lớn và tốc độ cao
Các tính năng của Vi điều khiển AVR
- 16KB Flash có thể lập trình trong hệ thống
- 512B EEPROM có thể lập trình trong hệ thống
- Bộ hẹn giờ 16 bit với các tính năng bổ sung
- Nhiều bộ dao động bên trong
- Bộ nhớ flash hướng dẫn tự lập trình bên trong lên đến 256K
- Có thể lập trình trong hệ thống bằng cách sử dụng ISP, JTAG hoặc các phương pháp điện áp cao
- Phần mã khởi động tùy chọn với các bit khóa độc lập để bảo vệ
- Thiết bị ngoại vi nối tiếp đồng bộ / không đồng bộ (UART / USART)
- Bus giao diện ngoại vi nối tiếp (SPI)
- Giao diện nối tiếp chung (USI) để truyền dữ liệu đồng bộ hai / ba dây
- Bộ định thời gian giám sát (WDT)
- Nhiều chế độ ngủ tiết kiệm điện
- Bộ chuyển đổi A / D 10 bit, với bộ ghép kênh lên đến 16 kênh
- Hỗ trợ bộ điều khiển CAN và USB
- Các thiết bị điện áp thấp hoạt động xuống 1.8v
Có rất nhiều bộ vi điều khiển họ AVR, chẳng hạn như ATmega8, ATmega16, v.v. Trong bài viết này, chúng tôi thảo luận về vi điều khiển ATmega328. ATmega328 và ATmega8 là IC tương thích với chân nhưng về mặt chức năng thì chúng khác nhau. ATmega328 có bộ nhớ flash 32kB, trong đó ATmega8 có 8kB. Sự khác biệt khác là thêm SRAM và EEPROM, bổ sung ngắt thay đổi chân và bộ định thời. Một số tính năng của ATmega328 là:
Đặc điểm của ATmega328
- Bộ vi điều khiển AVR 28 chân
- Bộ nhớ chương trình flash 32kbyte
- Bộ nhớ dữ liệu EEPROM 1kbyte
- Bộ nhớ dữ liệu SRAM 2kbyte
- Chân I / O là 23
- Hai bộ định thời 8 bit
- Công cụ chuyển đổi A / D
- PWM sáu kênh
- USART có sẵn
- Bộ dao động bên ngoài: lên đến 20MHz
Mô tả chân của ATmega328
Nó có DIP 28 chân, được hiển thị trong hình bên dưới:

Sơ đồ chân của bộ vi điều khiển AVR
Vcc: Điện áp cung cấp kỹ thuật số.
GND: Đất.
Cổng B: Cổng B là cổng I / O hai chiều 8 bit. Các chân Cổng B được chỉ định ba khi một điều kiện đặt lại hoạt động hoặc một, ngay cả khi đồng hồ không chạy.
Cổng C: Cổng C là cổng I / O hai chiều 7 bit với các điện trở kéo lên bên trong.
PC6 / ĐẶT LẠI
Cổng D: Nó là một cổng I / O hai chiều 8 bit với các điện trở kéo lên bên trong. Bộ đệm đầu ra của Cổng D bao gồm các đặc tính truyền động đối xứng.
AVcc: AVcc là chân cung cấp điện áp cho ADC.
VÙNG: AREF là chân tham chiếu tương tự cho ADC.
Các ứng dụng của Vi điều khiển AVR
Có rất nhiều ứng dụng của vi điều khiển AVR, chúng được sử dụng trong tự động hóa gia đình, màn hình cảm ứng, ô tô, thiết bị y tế và quốc phòng.
Bộ vi điều khiển PIC
PIC là một bộ điều khiển giao diện ngoại vi, được phát triển bởi vi điện tử của dụng cụ nói chung, vào năm 1993. Nó được điều khiển bởi phần mềm. Chúng có thể được lập trình để hoàn thành nhiều nhiệm vụ và kiểm soát một dòng thế hệ và nhiều hơn nữa. Bộ vi điều khiển PIC đang tìm đường vào các ứng dụng mới như điện thoại thông minh, phụ kiện âm thanh, thiết bị ngoại vi chơi game video và các thiết bị y tế tiên tiến.
Có rất nhiều PIC, bắt đầu bằng PIC16F84 và PIC16C84. Nhưng đây là những PIC flash duy nhất có giá cả phải chăng. Microchip gần đây đã giới thiệu chip flash với các loại hấp dẫn hơn nhiều, chẳng hạn như 16F628, 16F877 và 18F452. 16F877 có giá gấp đôi 16F84 cũ nhưng có kích thước mã gấp tám lần, RAM nhiều hơn, nhiều chân I / O hơn, bộ chuyển đổi UART, A / D và nhiều thứ khác.

Bộ vi điều khiển PIC
Đặc điểm của PIC16F877
Các tính năng của pic16f877 bao gồm những điều sau đây.
- CPU RISC hiệu suất cao
- Bộ nhớ chương trình FLASH lên đến 8K x 14 từ
- 35 Hướng dẫn (mã hóa độ dài cố định-14-bit)
- Bộ nhớ dữ liệu dựa trên RAM tĩnh 368 × 8
- Bộ nhớ dữ liệu EEPROM lên đến 256 x 8 byte
- Khả năng ngắt (lên đến 14 nguồn)
- Ba chế độ địa chỉ (trực tiếp, gián tiếp, tương đối)
- Đặt lại khi bật nguồn (POR)
- Ký ức kiến trúc Harvard
- Chế độ SLEEP tiết kiệm điện
- Dải điện áp hoạt động rộng: 2.0V đến 5.5V
- Dòng chìm / nguồn cao: 25mA
- Máy dựa trên bộ tích lũy
Tính năng ngoại vi
3 bộ đếm thời gian / bộ đếm (tiền vô hướng có thể lập trình)
- Timer0, Timer2 là bộ định thời / bộ đếm 8 bit với tiền vô hướng 8 bit
- Timer1 là 16-bit, có thể được tăng lên trong khi ngủ thông qua tinh thể / đồng hồ bên ngoài
Hai mô-đun chụp, so sánh, PWM
- Chức năng chụp đầu vào ghi lại số đếm Timer1 khi chuyển đổi chân
- Đầu ra hàm PWM là một sóng vuông với chu kỳ và chu kỳ nhiệm vụ có thể lập trình được.
Bộ chuyển đổi tín hiệu tương tự sang kỹ thuật số 8 kênh 10 bit
USART với phát hiện địa chỉ 9 bit
Cổng nối tiếp đồng bộ với chế độ chính và I2C Master / Slave
Cổng nô lệ song song 8 bit
Tính năng tương tự
- Bộ chuyển đổi Analog-to-Digital (A / D) 10-bit, lên đến 8 kênh
- Đặt lại màu nâu (BOR)
- Mô-đun so sánh tương tự (Ghép kênh đầu vào có thể lập trình từ đầu vào thiết bị và đầu ra của bộ so sánh có thể truy cập bên ngoài)
Mô tả Pin của PIC16F877A
Mô tả chân của PIC16F877A được thảo luận dưới đây.



Ưu điểm của PIC
- Đó là một thiết kế RISC
- Mã của nó cực kỳ hiệu quả, cho phép PIC chạy với bộ nhớ chương trình thường ít hơn so với các đối thủ cạnh tranh lớn hơn của nó
- Đó là chi phí thấp, tốc độ đồng hồ cao
Một mạch ứng dụng điển hình của PIC16F877A
Mạch bên dưới bao gồm một đèn có điều khiển chuyển mạch bằng vi điều khiển PIC. Bộ vi điều khiển được giao diện với một tinh thể bên ngoài cung cấp đầu vào xung nhịp.

Ứng dụng vi điều khiển PIC16F877A
PIC cũng được giao diện bằng một nút nhấn và khi nhấn nút nhấn, Bộ vi điều khiển theo đó sẽ gửi tín hiệu cao đến chân đế của bóng bán dẫn, để bật bóng bán dẫn và do đó cung cấp kết nối thích hợp với rơ le để bật nó và cho phép dòng điện xoay chiều đi qua đèn và do đó đèn phát sáng. Trạng thái của hoạt động được hiển thị trên màn hình LCD được giao tiếp với bộ vi điều khiển PIC.
Bộ vi điều khiển MSP
Một vi điều khiển như MSP430 là một vi điều khiển 16 bit. Thuật ngữ MSP là từ viết tắt của “Bộ xử lý tín hiệu hỗn hợp”. Họ vi điều khiển này được lấy từ Texas Instruments và được thiết kế cho các hệ thống tiêu tán công suất thấp cũng như chi phí thấp. Bộ điều khiển này bao gồm một bus dữ liệu 16 bit, các chế độ địa chỉ-7 với bộ lệnh giảm bớt, cho phép mã lập trình dày hơn, ngắn hơn, được sử dụng để thực hiện nhanh chóng.
Vi điều khiển này là một loại mạch tích hợp, được sử dụng để thực hiện các chương trình điều khiển máy móc hoặc thiết bị khác. Nó là một loại thiết bị siêu nhỏ, được sử dụng để điều khiển các máy móc khác. Các tính năng của bộ vi điều khiển này thường có thể có được với các loại vi điều khiển khác.
- Hoàn thành SoC như ADC, LCD, cổng I / O, RAM, ROM, UART, bộ định thời cơ giám sát, bộ hẹn giờ cơ bản, v.v.
- Nó sử dụng một tinh thể bên ngoài và một bộ dao động FLL (vòng lặp khóa tần số) chủ yếu lấy ra tất cả các CLK bên trong
- Sử dụng điện năng thấp, chỉ 4,2 nW cho mỗi lệnh
- Bộ tạo ổn định cho các hằng số được sử dụng thường xuyên nhất như –1, 0, 1, 2, 4, 8
- Tốc độ cao điển hình là 300 ns cho mỗi lệnh như CLK 3,3 MHz
- Các chế độ định địa chỉ là 11 trong đó bảy chế độ địa chỉ được sử dụng cho toán hạng nguồn và bốn chế độ định địa chỉ được sử dụng cho toán hạng đích.
- Kiến trúc RISC với 27 hướng dẫn cốt lõi
Công suất thời gian thực đầy, ổn định và tần số CLK hệ thống danh định có thể đạt được sau 6 đồng hồ chỉ khi MSP430 được khôi phục từ chế độ công suất thấp. Đối với tinh thể chính, không cần chờ đợi để bắt đầu ổn định và dao động.
Các hướng dẫn cốt lõi đã được kết hợp bằng cách sử dụng các tính năng đặc biệt để làm cho chương trình dễ dàng trong vi điều khiển MSP430 bằng cách sử dụng trình hợp dịch trong C để cung cấp chức năng vượt trội cũng như tính linh hoạt. Ví dụ, ngay cả khi sử dụng số lượng lệnh thấp, bộ vi điều khiển vẫn có khả năng tuân theo gần như toàn bộ tập lệnh.
Bộ vi điều khiển Hitachi
Vi điều khiển Hitachi thuộc họ H8. Một cái tên như H8 được sử dụng trong một họ vi điều khiển lớn 8 bit, 16 bit và 32 bit. Những bộ vi điều khiển này được phát triển thông qua Công nghệ Renesas. Công nghệ này được thành lập trên chất bán dẫn của Hitachi vào năm 1990.
Bộ vi điều khiển Motorola
Vi điều khiển Motorola là một vi điều khiển được tích hợp cực kỳ hiệu quả, được sử dụng cho quá trình xử lý dữ liệu với hiệu suất cao. Bộ vi điều khiển này sử dụng SIM (Mô-đun tích hợp hệ thống), TPU (Đơn vị xử lý thời gian) & QSM (Mô-đun nối tiếp hàng đợi).
Ưu điểm của các loại vi điều khiển
Ưu điểm của các loại vi điều khiển bao gồm những điều sau đây.
- Đáng tin cậy
- Có thể tái sử dụng
- Tiết kiệm năng lượng
- Tiết kiệm chi phí
- Có thể tái sử dụng
- Nó đòi hỏi ít thời gian hơn để hoạt động
- Đây là những linh hoạt và rất nhỏ
- Do tính tích hợp cao của chúng, kích thước và chi phí của hệ thống có thể được giảm bớt.
- Giao diện của bộ vi điều khiển dễ dàng với ROM bổ sung, RAM và các cổng I / O.
- Nhiều tác vụ có thể được thực hiện, do đó hiệu quả của con người có thể bị giảm.
- Nó rất đơn giản để sử dụng, khắc phục sự cố và bảo trì hệ thống rất đơn giản.
- Nó hoạt động như một máy vi tính mà không cần bất kỳ bộ phận kỹ thuật số nào
Nhược điểm của các loại vi điều khiển
Những nhược điểm của các loại vi điều khiển bao gồm những điều sau đây.
- Lập trình phức tạp
- Độ nhạy tĩnh điện
- Không thể giao tiếp với các thiết bị công suất cao.
- Cấu trúc của nó phức tạp hơn so với các bộ vi xử lý.
- Nói chung, nó được sử dụng trong các thiết bị vi mô
- Nó chỉ đơn giản là thực hiện không đầy đủ. thực thi đồng thời.
- Nó thường được sử dụng trong thiết bị vi mô
- Nó có cấu trúc phức tạp hơn so với một bộ vi xử lý
- Bộ vi điều khiển không thể giao tiếp trực tiếp với thiết bị công suất cao hơn
- Nó chỉ thực hiện một số lần thực thi giới hạn đồng thời
Ứng dụng của các loại vi điều khiển
Bộ vi điều khiển chủ yếu được sử dụng cho các thiết bị nhúng, trái ngược với bộ vi xử lý được sử dụng trong máy tính cá nhân, nếu không thì các thiết bị khác. Chúng chủ yếu được sử dụng trong các thiết bị khác nhau như thiết bị y tế cấy ghép, công cụ điện, hệ thống điều khiển động cơ trong ô tô, máy móc dùng trong văn phòng, thiết bị được điều khiển thông qua điều khiển từ xa, đồ chơi, v.v. Các ứng dụng chính của các loại vi điều khiển bao gồm những điều sau đây.
- Ô tô
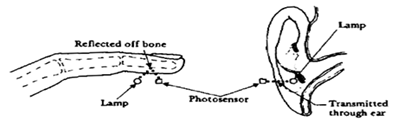
- Hệ thống đo sáng cầm tay
- Điện thoại di động
- Hệ thống máy tính
- Báo động an ninh
- Thiết bị
- Đồng hồ đo hiện tại
- Máy ảnh
- Lò vi sóng
- Dụng cụ đo lường
- Thiết bị kiểm soát quy trình
- Được sử dụng trong các thiết bị đo lường & đo lường, vôn kế, đo các vật thể quay
- Kiểm soát thiết bị
- Thiết bị đo đạc công nghiệp
- Thiết bị đo lường trong các ngành công nghiệp
- Cảm biến ánh sáng
- Thiết bị an toàn
- Các thiết bị điều khiển quá trình
- Điều khiển thiết bị
- Báo cháy
- Cảm biến nhiệt độ
- Điện thoại di động
- Điện thoại di động
- Máy giặt
- Máy ảnh
- Báo động an ninh
Vì vậy, đây là tất cả về tổng quan về các loại vi điều khiển . Các Bộ vi điều khiển này là các máy vi tính một chip và công nghệ được sử dụng để chế tạo nó là VLSI. Chúng còn được gọi là bộ điều khiển nhúng có sẵn 4 bit, 8 bit, 64 bit và 128 bit. Con chip này được thiết kế để điều khiển các chức năng hệ thống nhúng khác nhau. Đây là một câu hỏi dành cho bạn, sự khác biệt giữa vi xử lý và vi điều khiển là gì?