
ĐẾN rô bốt là một máy cơ điện được điều khiển bởi một mạch điện hoặc một chương trình máy tính. Robot đã trao đổi con người để hỗ trợ thực hiện các nhiệm vụ liên tục và nguy hiểm mà con người chọn không làm. Hiện tại rô bốt được phân thành các loại khác nhau dựa trên các tính năng và hiệu suất của chúng như rô bốt công nghiệp, rô bốt thương mại, rô bốt dịch vụ, rô bốt di động. Đây là một robot dịch vụ thực hiện các nhiệm vụ liên tục để chào đón mọi người bằng chuyển động tay đại diện cho “Namaste” thông qua một tin nhắn thoại được ghi lại. Nói chung, khi chúng ta mời mọi người đến nhà, tiệc tùng, hôn lễ, văn phòng, ... chúng ta cần bố trí một người chào và mời họ ở cửa ra vào. Nếu lượng người ít thì nhiệm vụ đơn giản hơn. Nhưng nếu bạn chào hàng trăm người, thì nhiệm vụ thật khó khăn. Để khắc phục vấn đề này, đây là một dự án, cụ thể là robot namaste điều khiển bằng giọng nói.

Robot Namaste
Robot Namaste với điều khiển bằng giọng nói
Khái niệm chính của Namaste này dự án robot là điều khiển các động cơ servo khác nhau thông qua bảng Arduino. Robot này quét những người xung quanh và quay đầu của nó một góc 180 °. Nếu nó nhận ra bất cứ ai ở gần, thì nó sẽ ước người đó với Namaste bằng cả hai tay ép vào nhau. Đó là cách chúc phúc truyền thống của người dân Ấn Độ. Các ứng dụng của robot tham gia vào các trung tâm mua sắm, công viên, văn phòng để thu hút người dân.
Sơ đồ khối của Robot Namastae với điều khiển bằng giọng nói
Hình sau biểu thị sơ đồ khối của robot Namaste được điều khiển bằng giọng nói. Trong loại robot này, lệnh thoại được lập trình. Toàn bộ bảng phát triển có thể được kết nối với nguồn điện chung. Mô tả của mỗi và mọi khối như sau. Các Nguồn cấp cung cấp năng lượng cho tất cả các mô-đun. Các mô-đun này yêu cầu dòng điện tính bằng mA và điện áp hoạt động sẽ là 5V.

Sơ đồ khối của Robot Namastae với điều khiển bằng giọng nói
Bảng Arduino
Arduino là một loại công cụ dựa trên một bảng vi điều khiển đơn giản được sử dụng để điều khiển và cảm nhận thế giới vật lý hơn một máy tính để bàn. Đối với tính toán vật lý, có nhiều nền tảng vi điều khiển khác nhau. Các tính năng quan trọng của Arduino là phần mềm không tốn kém, mã nguồn mở và có thể mở rộng. Phần mềm Arduino có sẵn dưới dạng công cụ nguồn mở và ngôn ngữ có thể được mở rộng thông qua các thư viện C ++.

Bảng Arduino
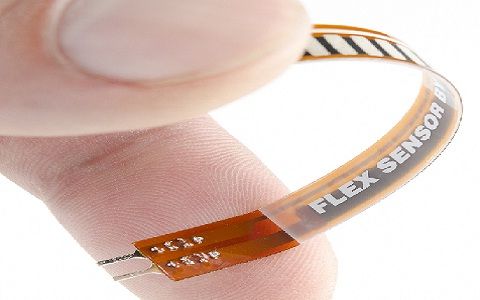
Cảm biến ping
Cảm biến ping sử dụng SONAR để kiểm soát khoảng cách của một đối tượng trong vùng lân cận. Điều này cảm biến được sử dụng như mắt của robot để cảm nhận chướng ngại vật, ví dụ như cảm biến khoảng cách. Nó cung cấp một phạm vi chính xác tuyệt vời và đọc ổn định. Hoạt động của cảm biến này không bị ảnh hưởng bởi vật liệu đen hoặc ánh sáng mặt trời. Các thông số kỹ thuật của cảm biến ping là điện áp là 5V, dòng điện là 15mA, góc cảm biến KHÔNG> = 15 và khoảng cách phát hiện là 2 cm ~ 450 cm.

Cảm biến ping
Giao diện của cảm biến ping với Arduino được hiển thị bên dưới. Có bốn chân có sẵn để giao tiếp cảm biến ping của anh ấy với bảng Arduino. Bốn chân trên bảng Arduino là GND, VCC, ECHO và TRIGGER. Các chân trên bảng là D0-D13, trong đó chân 12 và 13 là chân xuất nhập.
Bộ vi điều khiển Arduino cung cấp cho chúng ta một thư viện điều khiển servo cho phép chúng ta chuyển đổi các servo một cách dễ dàng. Trong dự án này, chúng tôi sử dụng 5 servo để điều chỉnh chuyển động của robot Namaste như đầu, khuỷu tay phải, khuỷu tay trái, vai phải và vai trái. Ở đây, các chân đầu vào / đầu ra kỹ thuật số (chân D5, D6, D9, D10, D1) biểu thị trong bảng Arduino được giao tiếp với động cơ servo.
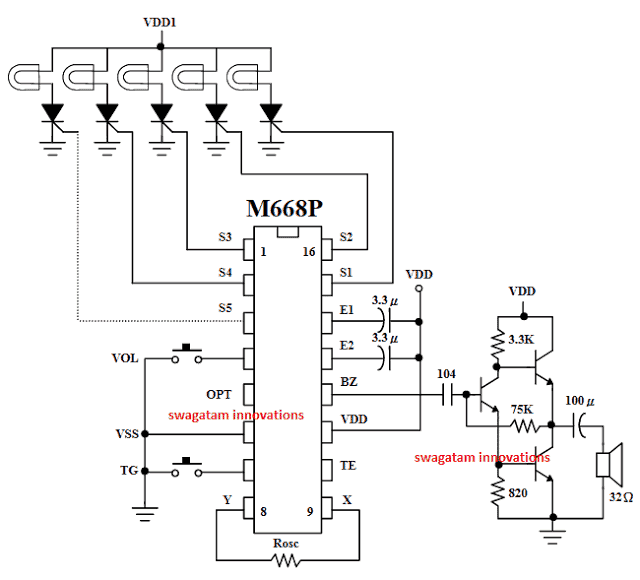
IC phát lại giọng nói
IC phát lại giọng nói này cung cấp tin nhắn đã ghi sẽ phát ở tốc độ tần số xác định trước. Phát lại được chuyển đến bộ khuếch đại âm thanh.

IC phát lại giọng nói
Chuyển tiếp
ĐẾN rơ le là một loại công tắc hoạt động bằng điện. Dòng điện chạy qua cuộn dây của rơle tạo ra từ trường tạo ra một đòn bẩy & thay đổi các tiếp điểm của công tắc.

Chuyển tiếp
Điều khiển bằng giọng nói Robot Namastae hoạt động
Hoạt động của robot Namaste có thể được thực hiện theo quy trình từng bước cùng với kết quả mô phỏng. Khi rô bốt Namaste ở trạng thái đầu tiên, thì động cơ servo s của rô bốt 2, 3, 4, 5 ở trạng thái TẮT hoặc trạng thái không. Đầu của rô bốt Namaste luân phiên từ trung tâm sang phải, trái và sau đó quay lại trung tâm do quay của động cơ Servo1 từ 0 ° -180 °. Chuyển động của đầu robot cho biết rằng robot Namaste đang tìm kiếm chướng ngại vật. Khi cảm biến ping phát hiện bất kỳ chướng ngại vật nào, vị trí đầu của robot sẽ quay trở lại trung tâm và động cơ Servo1 di chuyển ở góc 90 ° và TẮT. Nó được kích hoạt ở trạng thái THẤP.
Khi động cơ servo1 được TẮT thì các động cơ còn lại như servo4 và servo5 sẽ BẬT. Dây tín hiệu được kích hoạt cho vai phải và trái của robot Namaste. Giờ đây, bàn tay của robot có thể chuyển động. Các động cơ servo vai được giao tiếp với các chân đầu vào và đầu ra kỹ thuật số của bảng Arduino. Tuy nhiên, các đường tín hiệu hoặc các chân này sẽ cao và vị trí của servo được thay đổi thành 90 °. Bây giờ servo4 và servo 5 TẮT.
Cuối cùng, chúng tôi có thể kết luận rằng, mục đích chính của điều khiển bằng giọng nói này robot là để cung cấp dịch vụ chào đón mọi người một cách lịch sự bằng cách phát hiện những người đi bộ trước mặt nó. Nó có thể được sử dụng ở nhiều nơi công cộng khác nhau như công viên, trung tâm mua sắm, tiệc tùng, ... Chúng tôi hy vọng rằng bạn đã hiểu rõ hơn về khái niệm này. Hơn nữa, bất kỳ truy vấn nào liên quan đến khái niệm này hoặc dựa trên arduino dự án robot , hãy đóng góp ý kiến quý báu của bạn bằng cách bình luận trong phần bình luận bên dưới.
Tín ảnh:
- Bảng Arduino nyacknewsandviews
- Cảm biến ping thị sai
- IC phát lại giọng nói kealab
- Chuyển tiếp thẳng thắn
- Robot Namaste lontockphoto







{kind=link}
{kind=link}
{kind=link}
{kind=link}