Bài đăng giải thích về một mạch cửa hoặc cửa quay tự động được điều khiển PWM đơn giản có tính năng đóng / mở tự động thông qua giai đoạn ngắt ảnh. Ý tưởng do ông Bruce Clark yêu cầu.
Thông số kỹ thuật
Cảm ơn bạn cho một dịch vụ thực sự tuyệt vời mà bạn cung cấp.
Bạn có thể vui lòng giúp tôi sửa đổi mạch của bạn tại:
Giải thích 3 mạch điều khiển tốc độ động cơ DC đơn giản
Tôi muốn sử dụng arduino PWM để điều khiển động cơ điều khiển cổng 12Vdc (sẽ vẽ 9 ampe khi khởi động) bằng bóng bán dẫn nguồn MJ11015G.
Tình huống khó xử của tôi nằm ở yêu cầu cung cấp đủ năng lượng cho đế bóng bán dẫn và các sửa đổi mạch liên quan trong giới hạn của arduino Uno. Đó là sự hiểu biết rất hạn chế của tôi rằng các cổng đảo ngược thậm chí sẽ không đủ cho ứng dụng này.
Tôi biết rằng giới hạn của Arduino là 40mA trên mỗi chân đầu ra. Nếu tôi áp dụng một đầu ra PWM thông qua một điện trở 120 Ohm trực tiếp vào đế của các bóng bán dẫn này thì tôi có ổn không? Nếu không, vui lòng tư vấn một giải pháp thay thế.
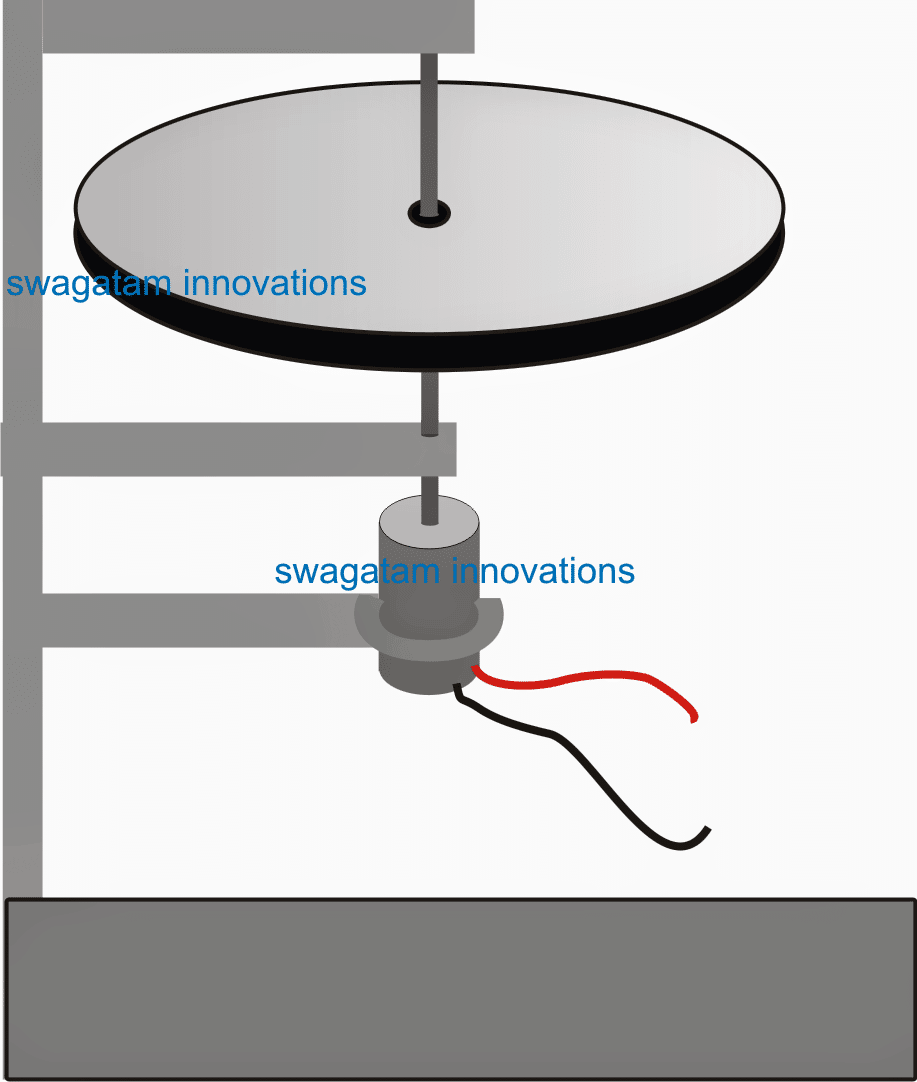
Về cơ bản, tôi muốn sử dụng động cơ cho cửa quay hoặc cửa tự động và như vậy cần có chức năng dừng và đảo chiều chết. Một bộ chuyển đổi quang học sẽ được sử dụng để xác định vị trí của cửa và gây ra sự dừng lại ngắn và sau đó đảo ngược về vị trí ban đầu, nơi nó sẽ được lập chỉ mục thông qua một cảm biến.
Cánh cửa có thể khá nặng và không gian rất hạn chế nên tôi định lái cánh cửa bằng động cơ được đề cập thông qua hộp số giảm tốc.
Sự giúp đỡ của bạn sẽ được đánh giá chân thành nhất
Trân trọng
Bruce Clark
Thiết kế
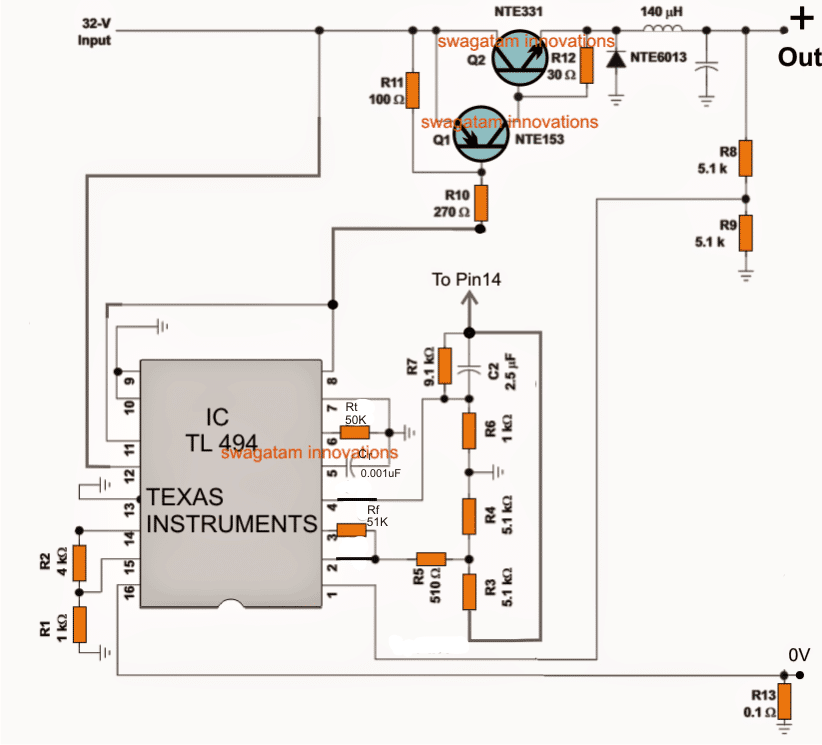
Một mạch điều khiển động cơ dựa trên PWM rất đơn giản với mô-men xoắn cao và tính năng dừng / đảo chiều tức thì có thể được chứng kiến trong sơ đồ đã cho và có thể được sử dụng để vận hành ứng dụng cửa quay hoặc cửa tự động được đề xuất.
Sơ đồ PWM

Nếu PWM dựa trên Arduino được dự định sử dụng, giai đoạn IC trong sơ đồ trên có thể được loại bỏ và PWM từ Arduino có thể được áp dụng trực tiếp tại cơ sở của mosfet thông qua điện trở 10 ohm như hình dưới đây
Trình điều khiển chuyển tiếp DPDT

Danh sách các bộ phận
R1 = 10 nghìn
R2 = 47 OHMS
P1 = 100K POT
D1, D2 = 1N4148
D3 = MUR1560
C1, C2 = 0,1uF / 100V
Z1 = 15V, 1/2 WATT
Q1 = IRF540
N1 --- N6 = IC MM74C14
DPDT = CHUYỂN ĐỔI DPST HOẶC RELAY DPDT
Hoạt động mạch
Mạch đầu tiên ở trên, không sử dụng đầu vào Arduino, được cấu hình xung quanh 6 cổng Schmidt NOT của biến tần hex từ IC MM74C14, trong đó N1 tạo thành bộ tạo xung sóng hình chữ nhật cơ bản, N2 được sử dụng để phát hiện chu kỳ làm việc của các xung được tạo ra bởi N1 qua pot P1, trong khi phần còn lại cổng được nối dây như bộ đệm .
P1 được sử dụng để xác định tốc độ mở và đóng cửa tự động.
Đầu ra PWM cuối cùng đạt được từ các đầu ra của bộ đệm N3 đến N6 được áp dụng cho một mosfet trình điều khiển Q1 sẽ chịu trách nhiệm điều khiển tốc độ của động cơ đi kèm tùy thuộc vào dữ liệu PWM được cấp.
Một công tắc DPDT có thể được gắn với các đầu cuối của động cơ và mosfet, công tắc này được sử dụng để có được phanh tức thời và đảo chiều quay của động cơ.
Điều tốt về mạch này là nó phụ thuộc vào cấu hình trình điều khiển cầu H để đạt được các hành động lật động cơ, thay vì điều này được thực hiện bằng cách sử dụng một công tắc DPDT thông thường.
Theo yêu cầu, để thực hiện đóng mở cửa tự động thông qua thiết bị nhạy ảnh, DPDT có thể được thay thế bằng rơ le DPDT và cuộn dây của rơ le này có thể được điều khiển lần lượt thông qua thiết bị nhạy ảnh dự kiến (bộ ngắt ảnh) như vậy như một diode quang hoặc một LDR.
Giai đoạn ngắt ảnh sẽ sớm được cập nhật.
Trước: What’s Islanding in GTI (Grid Tie Inverter) Tiếp theo: Tùy chỉnh Đèn đánh dấu bên ô tô thành Đèn đánh dấu bên nhấp nháy