Trong dự án này, chúng tôi sẽ giảm D.C 12v xuống bất kỳ giá trị D.C nào trong khoảng từ 2 đến 11V. Mạch làm giảm điện áp D.C được gọi là bộ chuyển đổi buck. Điện áp đầu ra hoặc điện áp bước xuống cần thiết được điều khiển bằng chiết áp kết nối với arduino.
Bởi Ankit Negi
GIỚI THIỆU VỀ NGƯỜI CHUYỂN ĐỔI:
Về cơ bản có hai loại bộ chuyển đổi:
1. Bộ chuyển đổi Buck
2. Bộ chuyển đổi tăng cường
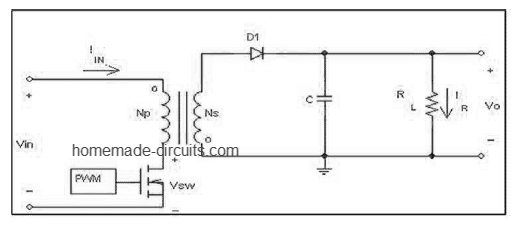
Cả hai bộ chuyển đổi đều thay đổi điện áp đầu vào theo yêu cầu. Chúng tương tự như một máy biến áp với một điểm khác biệt chính. Trong khi máy biến áp bước lên / xuống một điện áp A.C, thì máy biến áp bước lên / xuống điện áp D.C. Các thành phần chính của cả hai bộ chuyển đổi là:
A. MOSFET
B. CÔNG CỤ
C. VỐN
BUCK CONVERTER: như tên gọi của chính nó, buck có nghĩa là hạ thấp điện áp đầu vào. dụng cụ đổi tiền cho ta hiệu điện thế nhỏ hơn hiệu điện thế D.C đầu vào có công suất dòng điện lớn. Nó là một chuyển đổi trực tiếp.
BOOST CONVERTER: đúng như tên gọi, boost có nghĩa là tăng điện áp đầu vào.
Bộ chuyển đổi tăng cường cho chúng ta điện áp D.C nhiều hơn điện áp D.C ở đầu vào. Nó cũng là một chuyển đổi trực tiếp.
** trong dự án này, chúng tôi sẽ tạo một mạch chuyển đổi buck để chuyển xuống 12 v D.C bằng cách sử dụng arduino làm nguồn PWM.
THAY ĐỔI TẦN SỐ PWM TRÊN CÁC PIN ARDUINO:
Các chân PWM của arduino UNO là 3, 5, 6, 9, 10 và 11.
Để thực hiện PWM, lệnh được sử dụng là:
analogWrite (PWM PIN NO, PWM VALUE)
và tần số PWM cho các chân này là:
Đối với các chân Arduino 9, 10, 11 và 3 ---- 500Hz
Đối với chân Arduino 5 và 6 ---- 1kHz
Các tần số này phù hợp cho mục đích sử dụng chung như làm mờ đèn led. Nhưng đối với mạch như công cụ chuyển đổi buck hoặc boost , người ta cần nguồn PWM tần số cao (trong khoảng hàng chục KHZ) vì MOSFET cần tần số cao để chuyển đổi hoàn hảo và đầu vào tần số cao cũng làm giảm giá trị hoặc kích thước của các thành phần mạch như cuộn cảm và tụ điện. Vì vậy, đối với dự án này, chúng tôi cần nguồn PWM tần số cao.
Điều tốt là chúng ta có thể thay đổi tần số PWM của các chân PWM của arduino bằng cách sử dụng mã đơn giản:
ĐỐI VỚI ARDUINO UNO:
Tần số PWM khả dụng cho D3 & D11:
// TCCR2B = TCCR2B & B11111000 | B00000001 // cho tần số PWM 31372,55 Hz
// TCCR2B = TCCR2B & B11111000 | B00000010 // cho tần số PWM 3921,16 Hz
// TCCR2B = TCCR2B & B11111000 | B00000011 // cho tần số PWM 980,39 Hz
TCCR2B = TCCR2B & B11111000 | B00000100 // cho tần số PWM 490,20 Hz (DEFAULT)
// TCCR2B = TCCR2B & B11111000 | B00000101 // cho tần số PWM 245,10 Hz
// TCCR2B = TCCR2B & B11111000 | B00000110 // cho tần số PWM là 122,55 Hz
// TCCR2B = TCCR2B & B11111000 | B00000111 // cho tần số PWM 30,64 Hz
Tần số PWM khả dụng cho D5 & D6:
// TCCR0B = TCCR0B & B11111000 | B00000001 // cho tần số PWM 62500,00 Hz
// TCCR0B = TCCR0B & B11111000 | B00000010 // cho tần số PWM 7812,50 Hz
TCCR0B = TCCR0B & B11111000 | B00000011 // cho tần số PWM 976,56 Hz (DEFAULT)
// TCCR0B = TCCR0B & B11111000 | B00000100 // cho tần số PWM 244,14 Hz
// TCCR0B = TCCR0B & B11111000 | B00000101 // cho tần số PWM 61,04 Hz
Tần số PWM khả dụng cho D9 & D10:
// TCCR1B = TCCR1B & B11111000 | B00000001 // đặt bộ định thời 1 số chia thành 1 cho tần số PWM là 31372,55 Hz
// TCCR1B = TCCR1B & B11111000 | B00000010 // cho tần số PWM 3921,16 Hz
TCCR1B = TCCR1B & B11111000 | B00000011 // cho tần số PWM 490,20 Hz (DEFAULT)
// TCCR1B = TCCR1B & B11111000 | B00000100 // cho tần số PWM 122,55 Hz
// TCCR1B = TCCR1B & B11111000 | B00000101 // cho tần số PWM 30,64 Hz
** chúng tôi sẽ sử dụng mã pin không. 6 cho PWM do đó mã:
// TCCR0B = TCCR0B & B11111000 | B00000001 // cho tần số PWM 62,5 KHz
DANH SÁCH THÀNH PHẦN:
1. ARDUINO UNO
2. CÔNG CỤ (100Uh)
3. SCHOTTKY DIODE
4. VỐN (100uf)
5. IRF540N
6. TIỀM NĂNG
7. 10k, 100ohm ĐIỆN TRỞ
8. TẢI (động cơ trong trường hợp này)
9,12 V PIN
SƠ ĐỒ MẠCH


Thực hiện các kết nối như trong sơ đồ mạch.
1. Kết nối các đầu cuối của chiết áp với chân 5v và chân nối đất của arduino UNO tương ứng trong khi đầu cuối gạt nước của nó với chân tương tự chân A1.
2. Kết nối chân PWM 6 của arduino với chân đế của mosfet.
3. Cực dương của pin để tiêu hao mosfet và cực âm với cực p của diode schottky.
4. Từ cực p của diode schottky, nối tải (động cơ) nối tiếp với cuộn cảm đến cực nguồn của mosfet.
5. Bây giờ kết nối đầu cuối n của diode schottky với đầu cuối nguồn của mosfet.
6. Kết nối tụ điện 47uf qua động cơ.
7. Cuối cùng kết nối chân nối đất của arduino với cực nguồn của mosfet.
Mục đích của mosfet:
Mosfet được sử dụng để chuyển đổi điện áp đầu vào ở tần số cao và cung cấp dòng điện cao với ít tản nhiệt hơn.
Mục đích của arduino:
Đối với tốc độ chuyển mạch cao của mosfet (ở tần số khoảng 65 KHz)
Mục đích của cuộn cảm:
Nếu mạch này được chạy mà không kết nối một cuộn cảm, thì khả năng cao làm hỏng mosfet do các xung điện áp cao trên thiết bị đầu cuối của mosfet.
Để ngăn chặn mosfet khỏi các xung điện áp cao này, nó được kết nối như trong hình vì khi mosfet ở trên nó sẽ tích trữ năng lượng và khi mosfet tắt, nó sẽ cung cấp năng lượng tích trữ này cho động cơ.
Mục đích của diode schottky:
Giả sử diode schottky không được kết nối trong mạch. Trong trường hợp này khi mosfet được tắt, cuộn cảm giải phóng năng lượng của nó để tải hoặc động cơ có ảnh hưởng rất nhẹ đến tải vì không có vòng lặp không hoàn chỉnh cho dòng điện chạy qua. Do đó, diode schottky hoàn thành vòng lặp cho dòng điện chạy qua. Bây giờ một diode bình thường không được kết nối ở đây vì diode schottky có điện áp chuyển tiếp thấp.để chỉ ra bước xuống điện áp trên tải.
Mục đích của chiết áp:
Chiết áp cung cấp giá trị tương tự cho arduino (dựa trên vị trí của thiết bị đầu cuối gạt nước) theo đó điện áp pwm được nhận bởi cực cổng của mosfet từ chân PWM 6 của Arduino. Giá trị này cuối cùng kiểm soát điện áp đầu ra trên tải.
Tại sao điện trở được kết nối giữa cổng và nguồn?
Ngay cả một lượng nhỏ tiếng ồn cũng có thể bật MOSFET. Do đó a kéo điện trở xuống được kết nối giữa cổng và mặt đất, tức là nguồn.
Mã chương trình
Burn this code to arduino:
int m // initialize variable m
int n // initialize variable n
void setup()
B00000001 // for PWM frequency of 62.5 KHz on pin 6( explained under code section)
Serial.begin(9600) // begin serial communication
void loop()
{
m= analogRead(A1) // read voltage value from pin A1 at which pot. wiper terminal is connected
n= map(m,0,1023,0,255) // map this ip value betwenn 0 and 255
analogWrite(6,n) // write mapped value on pin 6
Serial.print(' PWM Value ')
Serial.println(n)
}
GIẢI THÍCH MÃ
1. Biến x là giá trị điện áp nhận được từ chân A1 mà tại đó đầu cuối gạt nước của nồi được kết nối.
2. Biến y được gán giá trị được ánh xạ trong khoảng từ 0 đến 255.
3. ** như đã giải thích ở phần trên đối với mạch như bộ chuyển đổi buck hoặc boost, người ta cần nguồn PWM tần số cao (trong khoảng hàng chục KHZ) vì MOSFET cần tần số cao để chuyển đổi hoàn hảo và đầu vào tần số cao làm giảm giá trị hoặc kích thước của các thành phần mạch như cuộn cảm và tụ điện.
Vì vậy, chúng tôi sẽ sử dụng mã đơn giản này để tạo ra điện áp pwm xấp xỉ. Tần số 65 kHz: TCCR0B = TCCR0B & B11111000 | B00000001 // cho tần số PWM 62,5 KHz trên chân 6
Làm thế nào nó hoạt động:
Vì Potentiometer cung cấp giá trị tương tự cho arduino (dựa trên vị trí của thiết bị đầu cuối gạt nước), điều này xác định giá trị điện áp pwm nhận được bởi cực cổng của mosfet từ chân PWM 6 của Arduino.
Và giá trị này cuối cùng điều khiển điện áp đầu ra trên tải.
Khi mosfet được bật, cuộn cảm lưu trữ năng lượng và khi nó tắt năng lượng tích trữ này được giải phóng cho tải, tức là động cơ trong trường hợp này. Và bởi vì quá trình này diễn ra ở tần số rất cao, chúng tôi nhận được một bước giảm điện áp D.C trên động cơ phụ thuộc vào vị trí của thiết bị đầu cuối gạt nước vì mosfet là một thiết bị phụ thuộc điện áp.Hình ảnh nguyên mẫu:



 Video Clip Giải Thích Mạch Chuyển Đổi Buck ở Trên Sử Dụng Arduino
Video Clip Giải Thích Mạch Chuyển Đổi Buck ở Trên Sử Dụng Arduino
Một cặp: Mạch đồng hồ đo lưu lượng nước kỹ thuật số đơn giản sử dụng Arduino Tiếp theo: 4 Mạch Cảm Biến Tiệm Cận Đơn Giản - Dùng IC LM358, IC LM567, IC 555