Cảm biến tiệm cận IR là thiết bị phát hiện sự hiện diện của vật thể hoặc con người khi vật thể đó nằm trong phạm vi xác định trước từ cảm biến, thông qua chùm tia hồng ngoại phản xạ.
Ba khái niệm cảm biến tiệm cận hữu ích được giải thích ở đây, khái niệm đầu tiên dựa trên một opamp thông thường LM358, khái niệm thứ hai sử dụng IC LM567 hoạt động với nguyên tắc vòng lặp khóa pha đảm bảo phản ứng rất chính xác cho việc phát hiện. Mạch thứ ba hoạt động bằng cách sử dụng IC 555 phổ biến. Chúng ta hãy tìm hiểu từng mạch với giải thích từng bước.
Tổng quat
Đây là một danh sách dài các cảm biến có sẵn trên thị trường ngày nay.
Một trong những cảm biến như vậy là cảm biến tiệm cận.
Trong bài đăng này, chúng tôi sắp làm sáng tỏ cách hoạt động của cảm biến độ gần và những gì cung cấp kiến thức cần thiết để thực hiện dự án này tại nhà. Như tên cho thấy, thiết bị phát hiện xem một đối tượng ở gần hay xa nó. Chúng có thể được thiết kế theo nhiều cách khác nhau.
Nhưng, phương pháp phổ biến nhất là dựa trên tia HỒNG NGOẠI và OPAMP. Một số công dụng phổ biến của thiết bị này có thể thấy trong điện thoại di động, hệ thống xả nước tự động, vòi tự động, máy sấy tay và robot không bao giờ rơi.
Thành phần bắt buộc
1. IR dẫn đầu : Mỗi đèn led phát ra một số dạng bức xạ điện từ khi được cấp nguồn. Từ kinh nghiệm gia đình của chúng tôi, chúng tôi đã biết đèn led phát ra ánh sáng nhìn thấy được.
Tuy nhiên, cũng có một số đèn led đặc biệt phát ra tia hồng ngoại. Cũng giống như có thể nhìn thấy led có màu sắc khác nhau, IR led cũng phát ra các tia có bước sóng khác nhau. Tia hồng ngoại có thể có các bước sóng khác nhau và có thể nhận bất kỳ giá trị nào thuộc dải sóng của chúng.
Vì vậy, điều rất quan trọng là điốt quang IR được sử dụng phải có khả năng phát hiện bước sóng cụ thể của INFRA RED do đèn hồng ngoại phát ra.

2. IR PHOTODIODE : Nó là một loại diode đặc biệt được kết nối phân cực ngược để phát hiện tia hồng ngoại . Trong trường hợp không có bức xạ IR, nó có điện trở rất cao và thực tế dòng điện chạy qua nó bằng không.
Nhưng khi tia IR chiếu vào nó, điện trở của nó giảm và một dòng điện tỷ lệ với cường độ bức xạ được phép đi qua nó.
Đặc tính này của photodiode được sử dụng để tạo ra tín hiệu điện trong cảm biến tiệm cận về tỷ lệ tia IR.

3. Op-amp (IC LM358) : Op-amp hay bộ khuếch đại hoạt động là một ic đa năng và rất được tôn sùng trong thế giới điện tử.
Trong dự án này, op-amp được sử dụng như một bộ so sánh. IC LM358 có hai op-amps có nghĩa là chúng ta có thể tạo ra hai máy dò khoảng cách chỉ bằng một IC. Lý do sử dụng op-amp trong mạch là để chuyển đổi tín hiệu tương tự thành tín hiệu số.


Bốn. Đặt trước : Giá trị đặt trước về cơ bản là một điện trở có ba đầu cuối.
Chức năng của giá trị đặt trước là chia tổng điện áp có sẵn theo cách mà người dùng có thể truy cập một phần nhỏ của nó. Chúng ta chỉ cần đặt thiết bị đầu cuối ở giữa đến một vị trí thích hợp.
Giá trị đặt trước đặt điện áp ngưỡng mà trên đó điện áp đầu ra sẽ được tạo ra. Nó có thể được đặt thủ công ở bất kỳ giá trị nào bằng cách xoay đầu của nó bằng tuốc nơ vít phù hợp.

5. Dẫn màu đỏ : Tôi đã sử dụng đèn led đỏ cho dự án của mình nhưng nói chung đèn led màu nào cũng dùng được. Nó hoạt động như một tín hiệu trực quan cho thấy chướng ngại vật đã đến đủ gần.

6. Điện trở : Hai 220 ohm và một 10k ohm.
7. Nguồn cấp : 5 v đến 6 v.
Nó hoạt động như thế nào
Nguyên tắc hoạt động của cảm biến tiệm cận khá đơn giản. Một khái niệm điển hình có hai led song song với nhau - led phát hồng ngoại và một photodiode.
Chúng hoạt động như một cặp máy phát - máy thu. Khi một chướng ngại vật đến trước tia phát, chúng sẽ bị phản xạ trở lại và bị chặn bởi bộ thu.
Theo các đặc tính của điốt quang, các tia IR bị chặn làm giảm điện trở của điốt quang và kết quả là tín hiệu điện được tạo ra. Tín hiệu này trong thực tế là điện áp trên điện trở 10k được cấp trực tiếp cho đầu không đảo ngược của op-amp.

Chức năng của op-amp là so sánh hai đầu vào được cấp cho nó.
Tín hiệu từ điốt quang được cấp cho chân không đảo (chân 3) và điện áp ngưỡng từ chiết áp được cấp cho chân đảo ngược (chân 2). Nếu điện áp tại chân không đảo lớn hơn điện áp tại chân đảo ngược chân đầu ra op-amp cao, nếu không đầu ra thấp.
Nói chung, op-amp chuyển đổi tín hiệu tương tự thành tín hiệu kỹ thuật số trong mạch này.
ĐẦU RA:
Đầu ra của cảm biến có thể được sử dụng ở hai dạng: ANALOG và DIGITAL.
Đầu ra kỹ thuật số ở dạng cao hoặc thấp. Tín hiệu đầu ra kỹ thuật số của cảm biến khoảng cách có thể được sử dụng để dừng chuyển động của robot tránh chướng ngại vật. Ngay khi chướng ngại vật đến đủ gần, tín hiệu có thể được truyền trực tiếp đến các chân đầu vào của trình điều khiển động cơ để dừng động cơ.
Đầu ra tương tự là một dải giá trị liên tục từ 0 đến một giá trị hữu hạn nào đó. Tín hiệu như vậy không thể được cấp trực tiếp cho trình điều khiển động cơ và các thiết bị chuyển mạch khác. Đầu tiên chúng cần được xử lý bởi bộ vi điều khiển và chuyển đổi thành dạng kỹ thuật số thông qua ADC và một số mã hóa. Dạng đầu ra này yêu cầu một bộ vi điều khiển bổ sung nhưng loại bỏ việc sử dụng op-amp.
Toàn mạch Digaram

CẬP NHẬT từ quản trị viên
Thiết kế mạch trên cũng có thể được xây dựng bằng cách sử dụng một IC opamp đơn thông thường 741, như hình dưới đây:

Đoạn ghi hình
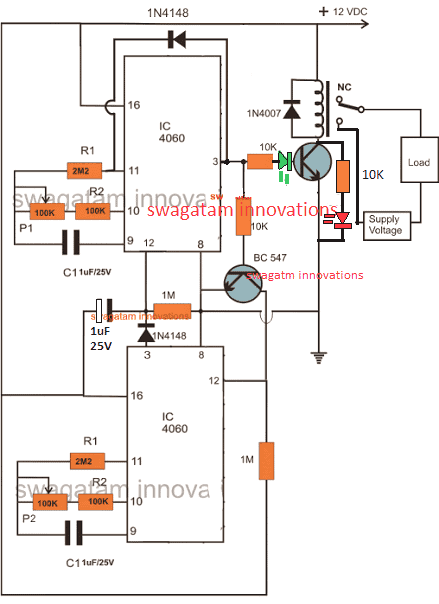
2) Mạch phát hiện tiệm cận chính xác (Miễn dịch với ánh sáng mặt trời)
Bài đăng sau giải thích một mạch phát hiện tiệm cận dựa trên tia hồng ngoại (IR) chính xác kết hợp với IC LM567 để đảm bảo các hoạt động đáng tin cậy và an toàn. Mạch này miễn nhiễm với ánh sáng mặt trời hoặc bất kỳ ánh sáng xung quanh nào khác và sẽ không bị ảnh hưởng, cho đến khi cảm biến nhận được tín hiệu phản xạ đã điều chỉnh. Thiết kế cũng hoạt động như một máy dò tìm chướng ngại vật.
Khái niệm vi mạch
Tôi tìm thấy thiết kế này trên mạng khi đang tìm kiếm một mạch cảm biến tiệm cận chính xác và đáng tin cậy nhưng giá rẻ.
Mạch có thể được hiểu với sự trợ giúp của mô tả sau:
Tham khảo mạch dò chuyển động hồng ngoại (IR) được trình bày dưới đây, chúng ta thấy thiết kế bao gồm hai giai đoạn chính, một liên quan đến IC LM567 trong khi giai đoạn kia sử dụng IC555.
Về cơ bản IC LM567 trở thành trái tim của mạch chỉ thực hiện các chức năng tạo / phát tần số IR và cũng phát hiện tương tự.
Hơn nữa, IC có mạch vòng khóa pha bên trong làm cho nó có độ tin cậy cao với các ứng dụng mạch dò tần số.
Nó có nghĩa là một khi nó đọc và chốt ở một tần số nhất định, tính năng phát hiện của nó sẽ bị khóa với tần số đó và do đó bất kỳ nhiễu loạn nào khác cho dù nó có mạnh đến đâu cũng không ảnh hưởng hoặc làm hỏng chức năng của nó.
Hoạt động mạch
Một tần số dao động bên trong được xác định bởi R3, C2 cấp nguồn cho diode IR D274 thông qua một tầng điều khiển hiện tại bao gồm T1, R2. Tần số này quyết định tần số trung tâm của chip.
Với các điều kiện trên, IC được đặt và căn giữa ở tần số trên tạo ra mức cao không đổi tại chân đầu ra # 8 của nó.
Chân đầu vào số 3 của IC chờ nhận một tần số có thể chính xác bằng tần số 'trung tâm' ở trên của IC.
Bộ thu IR hoặc cảm biến được kết nối qua chân số 3 của IC được định vị chính xác cho mục đích này.
Ngay khi chùm tia hồng ngoại từ LD274 tìm thấy vật cản, chùm tia của nó sẽ bị phản xạ và rơi vào điốt dò được định vị thích hợp BP104.
Tần số IR từ LD274 bây giờ chuyển đến chân đầu vào # 3 của IC, vì tần số này sẽ giống hệt với tần số trung tâm đã đặt của IC, IC nhận ra điều này và ngay lập tức chuyển đầu ra của nó từ cao sang THẤP.
Bộ kích hoạt mức thấp trên ở chân số 2 của IC 555 được cấu hình như một bộ ổn định lần lượt sẽ chuyển đầu ra của nó lên mức cao, khiến cảnh báo được kết nối bị nổ.
Tình trạng trên vẫn tồn tại trong một thời gian dài khi sự gián đoạn của cảm biến / máy dò hồng ngoại vẫn còn và cho phép các chùm tia bị phản xạ. Với việc bao gồm R9 và C5, đầu ra của IC555 thể hiện điều kiện tắt trễ nhất định đối với bộ rung được kết nối ngay cả sau khi chuyển động hoặc chướng ngại vật di chuyển đi.
Để điều chỉnh hiệu ứng tắt trễ, R9 và C5 có thể được điều chỉnh tùy theo sở thích.
Mạch được giải thích ở trên cũng có thể được sử dụng như một mạch phát hiện khoảng cách và mạch phát hiện chướng ngại vật.
Sơ đồ mạch

Kiểm tra mạch
Mạch thử nghiệm sau đây cho thấy cách xác minh kết quả từ thiết kế cơ bản dựa trên LM567 IR. Sơ đồ có thể được nhìn thấy dưới đây:

Như bạn có thể thấy, chỉ có giai đoạn LM567 được kết hợp trong thiết kế trong khi giai đoạn IC 555 đã được loại bỏ để giữ cho các quy trình thử nghiệm cơ bản đơn giản hơn.
Ở đây đèn LED màu đỏ ở chân số 8 của IC sáng lên và vẫn sáng miễn là các đèn LED hồng ngoại được giữ song song với nhau trong khoảng cách 1 foot.
Nếu bạn thử thay thế đèn LED phát hồng ngoại Tx bằng một số nguồn bên ngoài khác có tần số khác, LM567 sẽ ngừng phát hiện tín hiệu và đèn LED màu đỏ sẽ ngừng phát sáng.
Điốt quang không quan trọng, bạn có thể sử dụng bất kỳ điốt ảnh tương tự hoặc tiêu chuẩn nào cho đèn LED bộ phát và bộ thu.
Video clip thiết lập thử nghiệm trên:
3) Một thiết kế cảm biến tiệm cận khác dựa trên IC 567
Cũng như ở trên, tính năng đặc biệt của mạch này là nó không thể được kích hoạt hoặc bị rung bởi bức xạ IR trực tiếp, thay vào đó, chỉ có bức xạ IR phản xạ chạm vào máy dò mới kích hoạt mạch.


Ở trung tâm của mạch là một IC giải mã âm 567 đơn lẻ (U1) thực hiện một chức năng kép: nó vừa chạy như một trình điều khiển bộ phát IR cơ bản vừa như một bộ thu. Tụ điện C1 và điện trở R2 được sử dụng để cố định tần số dao động bên trong của U1 vào khoảng 1 kHz.
Đầu ra sóng vuông từ U1 tại chân 5 được áp dụng trên đế Q1. Transistor Q1 được thiết lập như một bộ khuếch đại theo bộ phát, kết nối xung 20 mA trên cực dương LED2.
Bóng bán dẫn Q3 nhận đầu ra IR từ LED2 và chuyển hướng truyền đến Q2 để khuếch đại hơn. Sau khi khuếch đại bởi Q2, tín hiệu được đưa trở lại đầu vào của U1 tại chân 3, kích hoạt chân 8 trở nên mức thấp, chuyển sang BẬT LED1.
Khi cần thiết, LED1 có thể được thay thế bằng bộ ghép quang để chuyển đổi hầu như bất kỳ tải nào hoạt động bằng AC. Bởi vì mạch rất đơn giản, hầu hết mọi kế hoạch thiết kế sẽ hoạt động.
Bộ phát hồng ngoại (LED1) và phototransistor (03) phải được lắp đặt cách nhau khoảng inch trong một vị trí cạnh nhau và tập trung trong cùng một rãnh.
Có thể cần phải kiểm tra khoảng cách và góc nhìn lắp đặt của một cặp thiết bị IR để tìm ra vị trí hoàn hảo cho bất kỳ phạm vi được chỉ định nào giữa bộ phát hiện và bộ phát.
Theo quy luật chung, khoảng cách inch giữa cặp bộ phát / dò IR giúp cho mạch gần có thể phát hiện ra mục tiêu cách nhau khoảng nửa đến 1 inch. Các mục tiêu được tô bóng sáng hơn phản ánh tốt hơn nhiều và có thể hoạt động ở khoảng cách xa hơn so với các mục tiêu được tạo từ các phần tử sâu hơn. Miễn là cảm biến khoảng cách nhận các tín hiệu IR đã điều chỉnh, mạch được điều khiển tiếp tục được bật và ngay khi tín hiệu biến mất, đầu ra sẽ tắt.
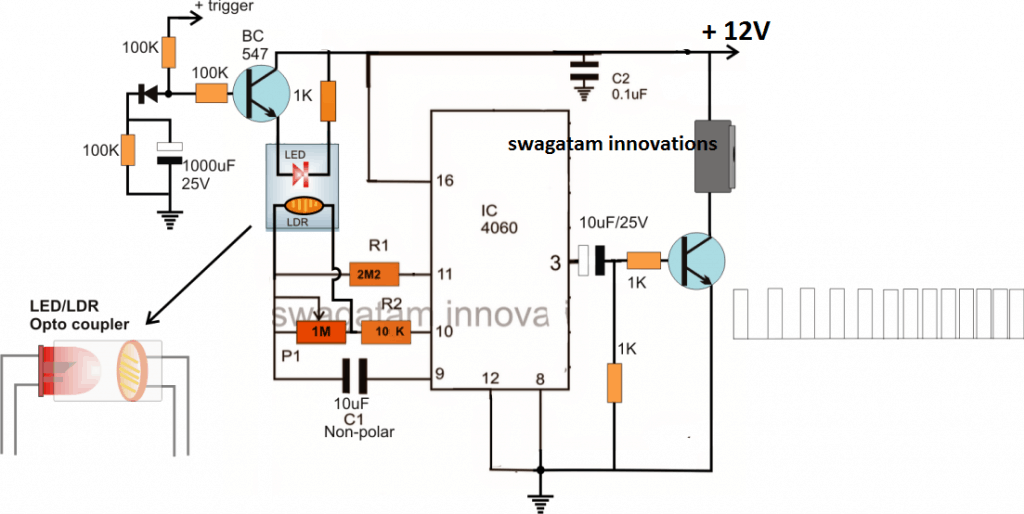
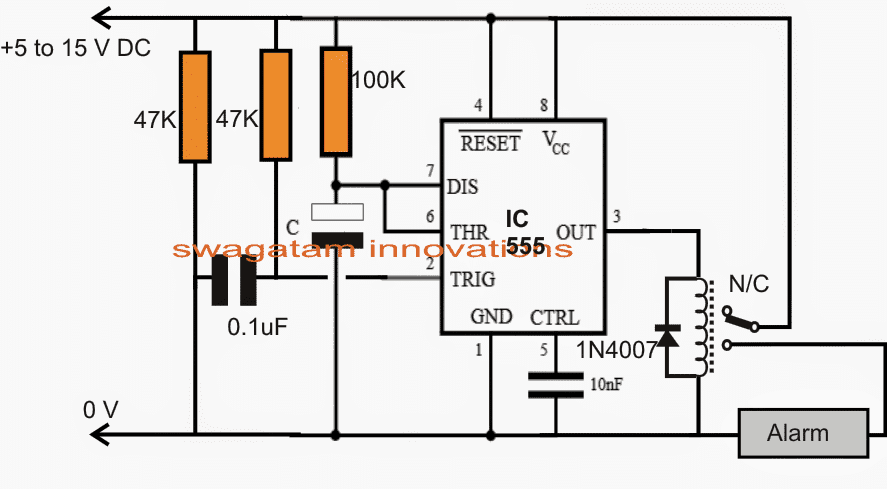
4) Bộ phát hiện tiệm cận sử dụng mạch IC 555
Trong thiết kế thứ ba này, chúng ta thảo luận về một mạch phát hiện tiệm cận đơn giản dựa trên IC 555 có thể được sử dụng để phát hiện sự xâm phạm của con người từ xa.
Hoạt động mạch
Một đầu báo tiệm cận hồng ngoại có thể được coi là một trong những mạch có giá trị và được sử dụng rộng rãi trong phạm vi ứng dụng điện tử tự động hóa.
Chúng ta thường có thể thấy nó được sử dụng trong máy lọc nước tự động, máy sấy tay tự động và một số biến thể cụ thể có thể được chứng kiến trong cửa tự động của các cửa hàng bách hóa.
Nguyên lý làm việc của mạch phát hiện tiệm cận được đề xuất sử dụng IC 555
Trong thiết kế, việc tạo ra các xung điện áp đỉnh nhanh chóng từ IC LM555 được thực hiện ở tốc độ tần số tương đối thấp hơn, tần số này được truyền qua LED hồng ngoại dưới dạng các tia hồng ngoại.
Các xung được truyền này được tập trung vào khu vực cần được theo dõi và được phản xạ trở lại khi phát hiện chủ thể hoặc kẻ xâm nhập qua một diode quang điện trở được đặt ở vị trí chiến lược để nhận các tín hiệu phản xạ này ..
Khi điều này xảy ra, các tín hiệu nhận được sẽ được xử lý để kích hoạt một cơ chế chuyển tiếp được gắn kèm và sau đó một thiết bị báo động được kích hoạt.
Để kiểm tra việc triển khai trên, một đối tượng có thể được đưa qua vùng của chùm tia hồng ngoại và phản ứng có thể được kiểm tra bằng cách giám sát hoạt động của rơle, chẳng hạn như bằng cách di chuyển tay trong vùng lấy nét, trong khoảng cách khoảng 1 mét.
Khi các tín hiệu phản xạ chạm vào phototransistor, nó phát triển một sự khác biệt tiềm năng trên nồi 1M (có thể điều chỉnh) và kích hoạt giai đoạn Darlington liên quan, lần lượt kích hoạt giai đoạn 555 phía bên phải được cấu hình như một mạch ổn định.
Rơ le được kích hoạt để đáp ứng điều này và vẫn BẬT tùy thuộc vào độ trễ thời gian xác định trước đơn ổn được thiết lập bởi tụ điện 1M và 10uF.
Sơ đồ mạch

Danh sách các bộ phận cho mạch phát hiện tiệm cận IR dựa trên IC 555 được đề xuất.
2-- IC LM 555
2-- ổ cắm IC 8 chân
1-- rơ le 12 V 5 chân
1-- Bóng bán dẫn quang hồng ngoại Mục đích chung

1-- Diode hồng ngoại Mục đích chung
3-- BC547
2-- tụ điện. 10 uF / 50 V
1-- 1N4148 diode
1-- dẫn đỏ 5mm
1-- 68 H
1-- 1K5
2-- 10 nghìn
1-- 100 nghìn
1-- 470 R H Tất cả 1/2 W
Điện trở 1-- 10k 1/4 w được kết nối giữa dây dẫn trung tâm 1M đặt trước và cặp BC547
Sơ đồ chân IC 555

Trước: Tạo bộ chuyển đổi Buck này bằng Arduino Tiếp theo: Bộ điều khiển máy bơm dựa trên SMS với Tự động tắt chạy khô tự động