Một thiết bị linh hoạt khác, IC 4060 có nhiều ứng dụng và có thể được sử dụng để thực hiện các chức năng hữu ích khác nhau trong mạch điện tử.
Giới thiệu
Về cơ bản, IC 4060 là một IC dao động / Hẹn giờ và có thể được sử dụng để tạo ra các khoảng thời gian chính xác có thể thay đổi khác nhau hoặc độ trễ hoặc cách khác, nó cũng có thể được sử dụng như một bộ dao động để thu được các dao động chu kỳ thời gian chính xác cao của tần số.
Điều tốt nhất về con chip này là nó có một mô-đun dao động tích hợp chỉ yêu cầu một vài thành phần bên ngoài để bắt đầu dao động.
Do đó IC không phụ thuộc vào bất kỳ đầu vào xung nhịp bên ngoài nào.

Danh sách các bộ phận
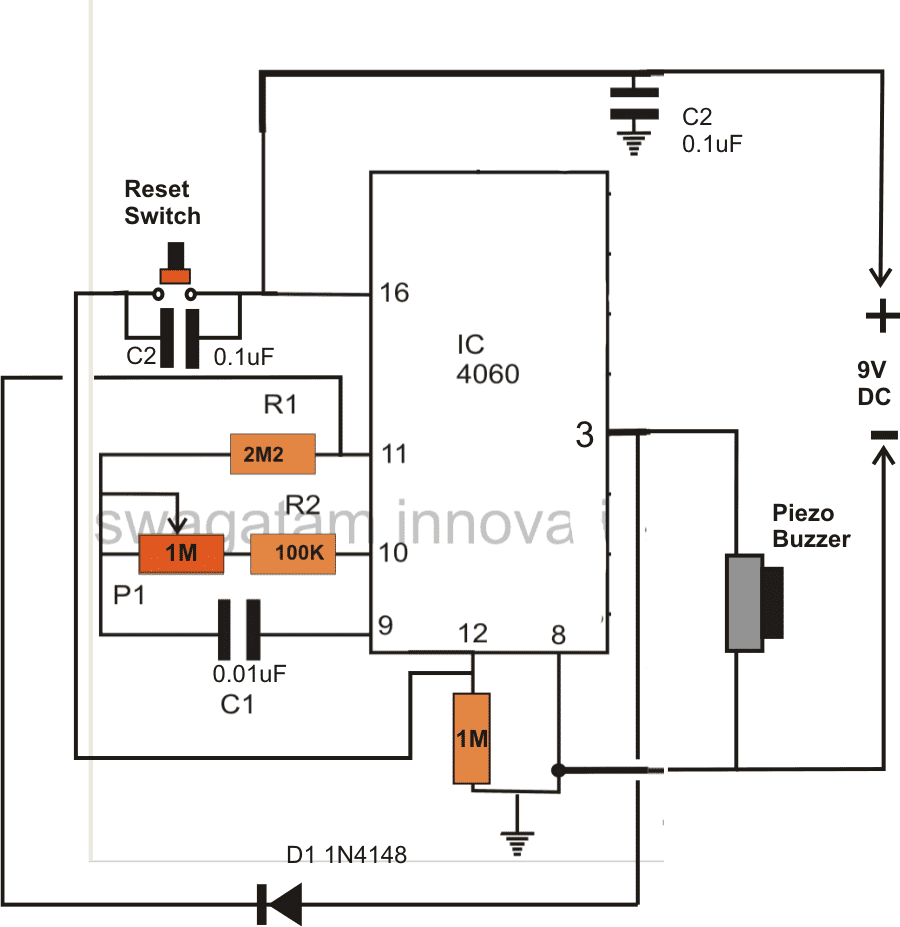
R1 = 2M2
P1 = 1M nồi
R2 = 100 nghìn
C1 = 1uF / 25V
Tìm hiểu chức năng sơ đồ của IC 4060
Hãy cố gắng hiểu các đầu ra chân của IC 4060 bằng các thuật ngữ đơn giản:
Tham khảo hình chúng ta thấy rằng các sơ đồ chân đầu vào duy nhất được yêu cầu cấu hình với các bộ phận bên ngoài là chân số 9, 10, 11 và 12, tất cả các sơ đồ chân còn lại là chân đầu ra của IC, ngoại trừ chân số 16 và chân # 8 rõ ràng là sơ đồ cung cấp Vcc và Vss.
Các đầu ra được chỉ định để tạo ra độ trễ thời gian BẬT / TẮT, hoặc tín hiệu đồng hồ, hoặc dao động hoặc tần số ở các mức khác nhau tùy thuộc vào giá trị của điện trở và tụ điện trên chân # 9/10 của IC.
Chân số 7 tạo ra giá trị tần số cao nhất, trong khi chân số 3 tạo ra giá trị thấp nhất.
Ví dụ: giả sử các giá trị điện trở / tụ điện ở chân số 9/10 làm cho chân số 7 tạo ra tần số 1MHz, thì chân số 5 sẽ tạo ra tần số 500 Khz, chân số 4 sẽ tạo ra 250 Khz, chân số 6 sẽ tạo ra 125KHz, chân # 14 sẽ tạo ra 62,5 KHz, v.v.
Như bạn có thể nhận thấy tần số cứ tăng dần theo tỷ lệ một nửa và điều này xảy ra với thứ tự sơ đồ chân là 7,5,4,6,14,13,15,1,2,3, trong đó chân số 7 tạo ra tần số cao nhất, trong khi pin số 3 là mức tối thiểu.
Như đã đề cập trước đó, tần số hoặc dao động ở trên có thể được bắt đầu hoặc thiết lập bằng cách kết nối một vài thành phần thụ động tại chân số 9, 10 và 11 của IC như trong hình, đơn giản vậy thôi.
Biến trở được sử dụng để thay đổi tần số đến bất kỳ mức mong muốn nào, giá trị tụ điện cũng có thể được thay đổi để thay đổi tần số của IC.
Chân số 12 là đầu vào đặt lại và phải luôn được nối đất hoặc kết nối với nguồn âm.
Một xung cung cấp tích cực cho đầu vào này sẽ thiết lập lại dao động hoặc hoàn nguyên vi mạch để nó bắt đầu đếm hoặc dao động lại từ đầu.
Chân # 16 là cực dương của IC và chân # 8 là đầu vào nguồn âm của IC.
Cách Reset IC 4060

Việc kích hoạt tự động đặt lại IC hẹn giờ như IC 4060 trở nên quan trọng để bắt đầu đồng hồ IC và quá trình đếm từ 0.
Nếu không có cơ sở đặt lại tự động, vi mạch có thể thể hiện quá trình đếm ngẫu nhiên hoặc ngẫu nhiên của nó, có thể không phải từ số 0 hoặc bắt đầu, thay vì từ bất kỳ mức trung gian nào.
Do đó, để đảm bảo tự động đặt lại cho IC, chúng ta phải bao gồm một mạng RC với sơ đồ đặt lại của IC như được giải thích dưới đây:
Thay vì kết nối chân số 12 trực tiếp với đường dây nối đất, hãy kết nối nó qua một điện trở có giá trị cao chẳng hạn như 100K.
Sau đó, gắn một tụ điện có giá trị nhỏ từ dương vào chân số 12, giá trị có thể nằm ở bất kỳ đâu từ 0,33uF đến 1uF.
Vậy là xong, bây giờ mạch hẹn giờ IC 4060 của bạn đã được kích hoạt tính năng tự động reset, và sẽ luôn khởi động với khởi động ổn định, từ số không.
Bật hành động đặt lại thủ công

Để đạt được cơ sở đặt lại thủ công trong bất kỳ mạch IC 4060 nào, bạn chỉ cần thay thế tụ điện bằng một nút nhấn, như hình trên.
Nhấn nút này bất cứ lúc nào trong quá trình đếm của IC, sẽ nhanh chóng đặt lại IC về không, để quá trình đếm có thể bắt đầu lại từ không.
Tính toán các giá trị thành phần RC thời gian
Hình ảnh dưới đây cho thấy phần phóng đại của IC chứa chân dao động # 9, 10, 11. Rt và Ct là các thành phần định thời chính thực sự chịu trách nhiệm xác định các khoảng thời gian trễ hoặc tần số khác nhau trên các đầu ra của IC.

Công thức chuẩn để tính giá trị Rt và Ct là:
f (osc) = 1 / 2.3 x Rt x Ct
2.3 là một hằng số theo cấu hình bên trong IC.
Về cơ bản, bộ dao động sẽ chỉ hoạt động bình thường khi các giá trị đã chọn thỏa mãn điều kiện:
Rt<< R2 and R2 x C2 << Rt x Ct.
R2 được định vị để giảm ảnh hưởng tần số của điện áp thuận lên điốt bảo vệ đầu vào.
C2 mô tả điện dung đi lạc và được cho là tối thiểu để cho phép khoảng thời gian đầu ra có độ chính xác cao hơn.
Đối với điều này, Ct phải tương đối lớn hơn C2, càng lớn càng tốt.
Rt cũng phải là một giá trị khá lớn để phủ định điện trở LOCMOS bên trong, xuất hiện nối tiếp với Rt bên trong.
Giá trị thông thường của nó là khoảng 500 Ω ở VDD = 5 V, 300 Ω ở VDD = 10 V và 200 Ω ở VDD = 15 V.
Để đảm bảo một hành động dao động thích hợp, các giá trị được khuyến nghị nhất của các bộ phận thời gian được đề cập ở trên phải được cấu hình theo các điều kiện sau:
Ct ≥ 100 pF, lên đến bất kỳ giá trị khả thi nào,
10 kΩ ≤ Rt ≤ 1 MΩ.
Sử dụng IC 4060 với Bộ tạo dao động tinh thể
Mặc dù bản thân IC 4060 khá chính xác với tần số dao động và khoảng thời gian trễ, điều này có thể được nâng cao hơn nữa bằng cách sử dụng một thiết bị tinh thể bên ngoài với IC.
Một bộ dao động dựa trên tinh thể sẽ cho phép khóa tần số đến giá trị định trước và ngăn chặn bất kỳ dạng nào bị trôi khỏi giá trị dự định.
Sơ đồ sau đây cho thấy cách kết nối thiết bị tinh thể với IC 4060 để đạt được đầu ra tần số ổn định và chính xác:

Như chúng ta có thể thấy trong hình trên, chỉ có pin11 và pin10 được sử dụng để tích hợp tinh thể với IC. R2 được sử dụng để bắt đầu dao động tinh thể bằng cách cung cấp xung điện áp cần thiết cho tinh thể.
C3 và C2 cho phép tinh thể đạt được tần số cộng hưởng định mức của nó. C3 có thể được tinh chỉnh để thay đổi một chút giá trị cộng hưởng này của tinh thể, và do đó tần số đầu ra của IC 4060 tương ứng.
Trước: Làm thế nào để hiểu sơ đồ chân của IC 4017 Tiếp theo: Mạch phát hiện pha AC không tiếp xúc [Đã thử nghiệm]