Robot có thể được sử dụng trong nhiều ứng dụng trong các ngành công nghiệp, quân sự, trong nước. Một trong những công dụng chính của Robot là tài sản của con người. Cho dù đó là bất kỳ tình huống nguy hiểm nào như hỏa hoạn bùng phát hoặc một nơi đầy mìn, Robot có thể dễ dàng tìm ra cách giải quyết những vấn đề này. Vậy hãy cùng chúng tôi xem hai loại Robot này - Robot cảm biến mỏ đất và Robot chữa cháy
Robot cảm biến mỏ đất
Làm thế nào để khai thác mỏ đất với robot?
Một trong những ứng dụng quan trọng nhất của Robotics là trong quốc phòng. Robot trong quân đội là một phương tiện được điều khiển từ xa với nhiều tính năng độc đáo. Đó có thể là phương tiện robot có camera để do thám, phương tiện robot có súng LASER để phát hiện và tiêu diệt mục tiêu hoặc robot có máy dò kim loại để phát hiện sự hiện diện của các mỏ đất.
Một trong những cách dò mìn truyền thống và thông thường là sử dụng các cá nhân được đào tạo để tìm kiếm kim loại hoặc mìn theo cách thủ công bằng máy dò kim loại. Tuy nhiên, điều này là không an toàn và tốn kém và cũng chậm.
Để khắc phục vấn đề này, một hệ thống tiên tiến hơn được ưu tiên.
Một số cách để phát hiện mìn:
- Sử dụng rô bốt có thể đưa đầu dò xuống đất có thể phát hiện các vật thể bên dưới đất và xác định loại vật liệu.
- Sử dụng rô bốt có máy dò kim loại có thể cảm nhận được sự hiện diện của các phần tử dẫn điện như mỏ đất và báo động cho người dùng.
Trước khi đi sâu hơn vào chi tiết về loại thứ hai - tức là rô bốt có máy dò kim loại, chúng ta hãy nhớ lại ngắn gọn về hai thuật ngữ quan trọng - Land Mines và Metal Detector.
ĐẾN Mỏ đất là một thiết bị nổ được đặt cố ý bên dưới mặt đất sẽ phát nổ khi được kích hoạt bởi áp suất. Theo một báo cáo thống kê, có khoảng 100 triệu quả mìn ở 70 quốc gia trên thế giới. Một quả mìn sau khi được đặt có thể hoạt động đến 50 năm. Có nguy hiểm không !!

Máy dò kim loại cơ bản hoạt động dựa trên nguyên tắc của định luật cảm ứng faraday. Nó bao gồm một cuộn dây được cung cấp năng lượng để phát triển một từ trường xung quanh nó. Khi cuộn dây đến gần một phần tử dẫn điện như kim loại (mỏ), một dòng điện (dòng điện xoáy) được tạo ra trong nó. Dòng điện xoáy cảm ứng gây ra sự phát triển của trường điện từ xung quanh kim loại, trường này được truyền lại đến cuộn dây, tạo ra tín hiệu điện được phân tích. Lớn hơn là khoảng cách giữa cuộn dây và kim loại, yếu hơn là từ trường.
Một nguyên mẫu đơn giản:

Một nguyên mẫu đơn giản của phương tiện robot với máy dò kim loại
Thiết kế Robot:
Xe robot bao gồm các đơn vị sau:
- Một chân đế hình chữ nhật để nâng đỡ toàn bộ cấu trúc robot, gắn với hai bánh xe để chuyển động.
- Một vài động cơ DC để cung cấp chuyển động cần thiết cho robot.
- Bộ điều khiển bao gồm bộ thu RF nhận tín hiệu lệnh từ bộ phát để điều khiển trình điều khiển động cơ và điều khiển động cơ tương ứng.
- Một mạch dò kim loại cùng với cảnh báo còi được kích hoạt khi kim loại được phát hiện.
Cách hoạt động của Robot:
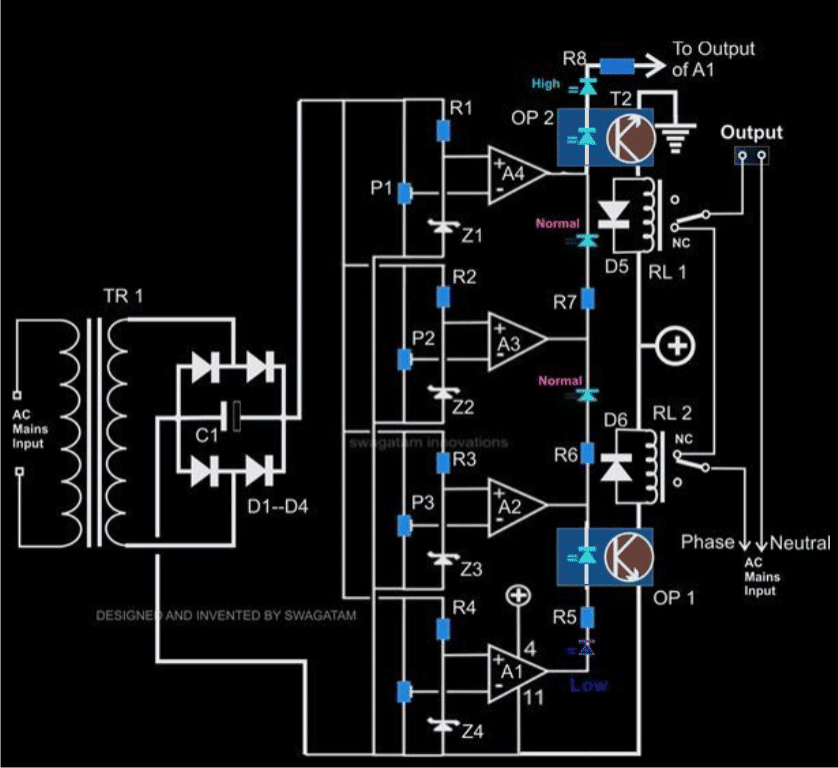
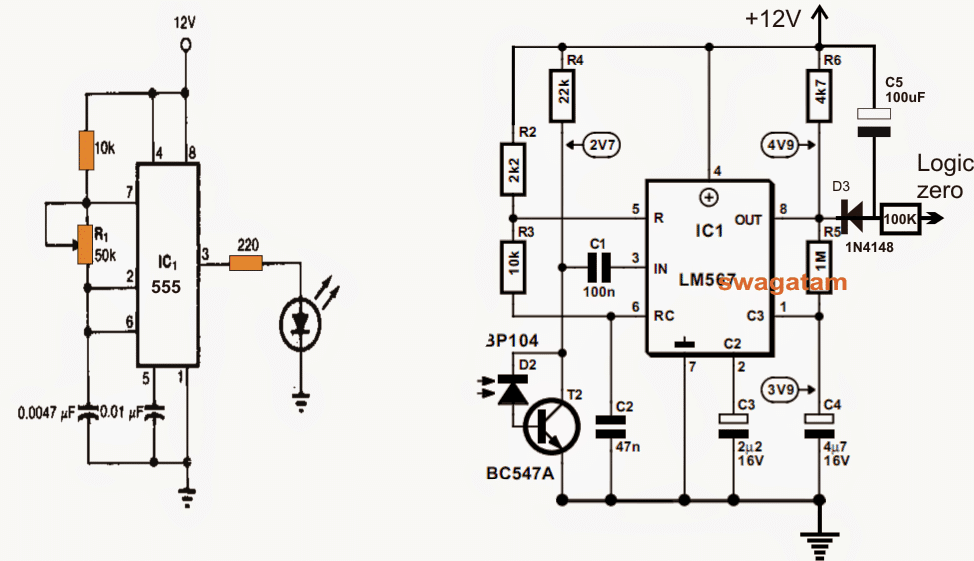
Mạch dò kim loại được nhúng trên mạch điều khiển robot bao gồm một bóng bán dẫn được dẫn động bởi một mạch dao động điều chỉnh bao gồm cuộn dây. Khi một kim loại được phát hiện và dòng điện được truyền lại qua cuộn dây, bóng bán dẫn1 ở trạng thái ở trạng thái và điều khiển bóng bán dẫn2 khác đến trạng thái tắt. Đến lượt bóng bán dẫn 3 này, điều khiển bóng bán dẫn khác đến điều kiện tắt. Bóng bán dẫn 3 cụ thể này được kết nối với bóng bán dẫn 4 khác được kết nối sao cho nó ở trong điều kiện khi bóng bán dẫn trình điều khiển 3 của nó ở trạng thái tắt. Bóng bán dẫn 4 được kết nối sao cho trong điều kiện, bộ rung và đèn LED được phân cực thích hợp và bắt đầu dẫn điện.

Sơ đồ khối của đơn vị máy dò kim loại
Đèn LED bắt đầu phát sáng và còi bắt đầu đổ chuông. Do đó khi phát hiện có kim loại, chuông báo động sẽ bắt đầu đổ chuông và đèn LED sẽ phát sáng.
Điều khiển Robot:
Nguyên mẫu đơn giản có thể được điều khiển bằng cách sử dụng giao tiếp RF, đây là một hệ thống liên lạc tầm ngắn. Các lệnh được truyền bằng cách sử dụng một bộ phát và nhận bởi một bộ thu được nhúng trên mạch robot để điều khiển chuyển động của robot.

Sơ đồ khối của phần máy phát
Máy phát bao gồm một tập hợp các nút bấm như tiến, lùi, dừng, trái và phải được nhấn để cung cấp chuyển động của rô bốt theo bất kỳ hướng nào mong muốn. Các nút bấm được kết nối với cổng đầu vào của bộ vi điều khiển. Bộ vi điều khiển khi nhận các tín hiệu này sẽ phát triển một tín hiệu 4 bit tương ứng ở dạng song song qua một cổng I / O khác, nơi mà một IC mã hóa được kết nối. Bộ mã hóa chuyển đổi các tín hiệu này thành dạng dữ liệu nối tiếp. Máy phát RF điều chế dữ liệu nối tiếp này, dữ liệu này được truyền qua ăng-ten.

Sơ đồ khối của phần bộ thu
Bộ phận thu được gắn trên robot bao gồm bộ thu RF giải điều chế tín hiệu này. IC giải mã nhận tín hiệu này ở dạng nối tiếp và phát triển một dữ liệu song song 4 bit tương ứng ở đầu ra của nó. Bộ vi điều khiển nhận dữ liệu này và theo đó cung cấp tín hiệu điều khiển tới IC điều khiển động cơ LM293D, IC điều khiển động cơ này.
Xe robot chữa cháy:
Khái niệm của xe chữa cháy chữa cháy đang chiến đấu trong đám cháy. Trong những năm gần đây đã xảy ra một số vụ tai nạn nghiêm trọng bao gồm cháy và nổ bom. Chúng ta đã biết về những vụ cháy lớn như nhà máy điện hạt nhân, nhà máy xăng dầu, bồn chứa khí đốt, hóa chất, các công ty công nghiệp cháy quy mô lớn ở những nơi này một khi bắt đầu xảy ra hỏa hoạn, hậu quả có thể rất nghiêm trọng. Hàng ngàn người đã chết vì bệnh này. Đó là chữa cháy phương tiện robot Công nghệ. Chiếc xe robot này được sử dụng để tìm đám cháy và chữa cháy.

Xe robot chữa cháy
Nguyên lý làm việc của xe robot chữa cháy:
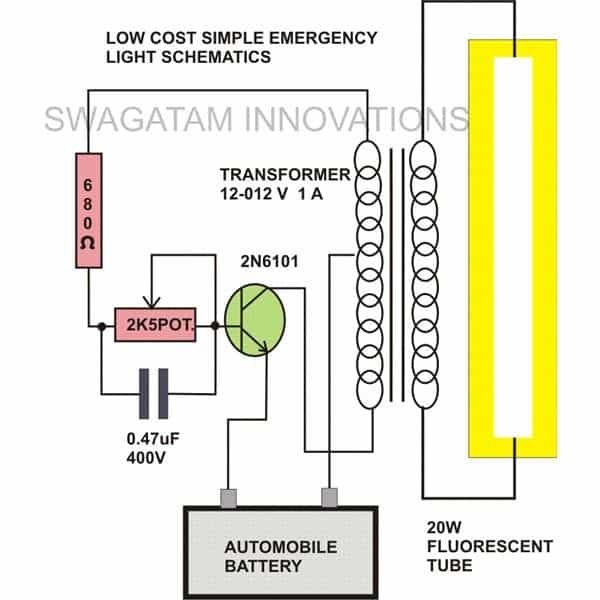
Xe rô-bốt chở nước. Máy bơm được điều khiển bằng giao tiếp không dây (giao tiếp RF và di động). Đầu máy phát kết nối với các nút bấm. Sử dụng nút bấm này, các lệnh sẽ được gửi đến người nhận và thời điểm điều khiển tiến, lùi, trái, phải giống như rô bốt. Ba động cơ cuối nhận được kết nối với bộ vi điều khiển.

Sơ đồ khối máy phát

Sơ đồ khối máy thu
Máy phát RF hoạt động như điều khiển từ xa RF ở phạm vi 200 mét. Trong nhà, văn phòng và các ngành công nghiệp, các cảm biến cháy được đặt ở những nơi nhất định khi xảy ra hỏa hoạn gần cảm biến cháy. Các cảm biến là một cảm giác rằng bit tương ứng được truyền đến máy thu RF. Bộ thu RF được tích hợp với một bộ vi điều khiển. Khi bộ thu RF nhận được các tín hiệu rằng thông tin đang chuyển đến bộ vi điều khiển, robot sẽ di chuyển đến các cảm biến cháy. Vị trí của các cảm biến được lưu trữ trong bộ vi điều khiển. Khi rô bốt đến vị trí mong muốn thì rô bốt dừng lại và kích hoạt máy phun vào đám cháy đó. Sau khi bắn robot đi về vị trí ban đầu. Toàn bộ mạch được điều khiển bởi vi điều khiển.
Các loại phương tiện robot chữa cháy:
Xe robot chữa cháy tại nhà :
Hành động hiện trường bị hạn chế trên Flore of house hiện tại. Robot này đang sử dụng nhiều vật dụng trong nhà để bắt lửa khi ai đó đang ngủ hoặc đi vắng. Robot này được sử dụng để bảo vệ ngôi nhà và sử dụng ứng dụng này, tất cả các cửa đều được mở trong Flore vì chiếc xe này đang di chuyển nơi này đến nơi khác trong nhà. Khu vực chữa cháy phải đảm bảo an toàn không để xảy ra tai nạn mới. Tính năng bổ sung của robot này là hoạt động ở khoảng cách xa.
Chữa cháy công nghiệp:
Hầu hết các ngành công nghiệp đều phải đối mặt với vấn đề tai nạn hỏa hoạn như khí đốt, xăng dầu, nhà máy điện hạt nhân, công nghiệp hóa chất với số lượng thiệt hại rất lớn và số người chết gần các khu vực lân cận ngày càng nhiều. Robot này thừa sức mang lửa đi khắp bên trong khu vực cháy để cung cấp nước không giới hạn. Lửa làm giảm tầm nhìn, nhiệt độ cao và nhiều tình huống khác có thể dẫn đến thương tích.
Chữa cháy rừng:
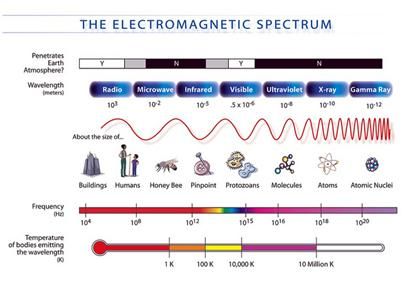
Cháy rừng rất nguy hiểm. Có thể chỉ trong một thời gian ngắn đã đốt cháy một lượng lớn diện tích rừng. Ngay cả các sở cứu hỏa của thành phố cũng phải đối phó với các vụ cháy rừng ở khu vực xung quanh thành phố. Vài năm trở lại đây, khoảng 152 lính cứu hỏa đã thiệt mạng trong những năm 1990. Các robot chữa cháy rừng đang sử dụng để bắt lửa và chữa cháy. Robot này sử dụng thiết bị điều khiển bên ngoài cho mục đích giao tiếp không dây. Mô-đun được kết nối với đầu ra của rô-bốt được sử dụng để chữa cháy rừng. Các ứng dụng như cảm biến áp suất, cảm biến nhiệt độ, cảm biến sương mù, cảm biến hồng ngoại, được sử dụng để điều khiển robot chữa cháy rừng.
Tại dấu nhắc!
Mặc dù tôi đã đưa ra ý tưởng cơ bản về robot với máy dò kim loại, nhưng một câu hỏi lớn vẫn còn tồn tại - Làm thế nào để hướng dẫn robot trên các địa hình không bằng phẳng mà chúng ta chưa biết, đặc biệt là trong môi trường có mưa lớn, bụi và phạm vi nhiệt độ nóng. Để tìm câu trả lời và đăng bình luận của bạn.