
Trong máy tính, giao diện CAN có thể là một ranh giới được chia sẻ qua hai phần riêng biệt của thông tin hội thoại hệ thống. Cuộc trò chuyện có thể được thực hiện giữa phần cứng máy tính, phần mềm, con người, thiết bị ngoại vi và sự kết hợp của những thứ này. Một số thiết bị phần cứng của máy tính như màn hình cảm ứng vì một màn hình cảm ứng có thể chia sẻ và nhận thông tin thông qua giao diện, trong khi các thiết bị khác như micrô, chuột chỉ có một chiều. Các giao diện chủ yếu có hai loại chẳng hạn như giao diện phần cứng và giao diện phần mềm. Giao diện phần cứng được sử dụng trong nhiều thiết bị như thiết bị đầu vào, đầu ra, bus và thiết bị lưu trữ. Giao diện CAN này có thể được xác định bởi các tín hiệu logic. Một giao diện phần mềm có thể có sẵn ở nhiều mức độ khác nhau. Một hệ điều hành có thể giao diện với các phần khác nhau của phần cứng. Các chương trình hoặc ứng dụng trên Hệ điều hành có thể cần giao tiếp thông qua các luồng và trong lập trình hướng đối tượng, các đối tượng trong bất kỳ ứng dụng nào cũng cần giao tiếp thông qua các phương thức.

CÓ THỂ XE BUÝT
Xe buýt CAN được phát triển vào năm 1983 tại Robert Bosch GmbH. Giao thức này được phát hành vào năm 1986 tại Đại hội SAE (Hiệp hội Kỹ sư Ô tô) ở Detroit, Michigan. Đầu tiên Giao thức CAN được sản xuất bởi Philips và Intel và được tung ra thị trường vào năm 1987. Nhưng BMW series-8 là chiếc xe đầu tiên có hệ thống đấu dây đa giao thức CAN.

CÓ THỂ XE BUÝT
Hình thức đầy đủ của CAN là mạng vùng điều khiển . Nó là một loại xe buýt chủ yếu được thiết kế để cho phép thiết bị và vi điều khiển để tương tác với nhau mà không cần máy chủ. Giao thức này dựa trên một thông điệp và chủ yếu được thiết kế cho hệ thống dây điện trong ô tô. Bosch đã xuất bản các phiên bản CAN khác nhau và vào năm 1991, CAN 2.0 mới nhất đã được xuất bản.
CAN bao gồm hai phần chủ yếu như phần A và phần B trong đó, Phần A là mã định danh 11 bit và nó ở định dạng chuẩn. Phần B là mã định danh 29 bit và nó ở định dạng mở rộng. CAN sử dụng số nhận dạng 11 bit được gọi là AN 2.0A và CAN sử dụng số nhận dạng 29 bit được gọi là CAN 2.0B
Giao diện CAN sang USB
Giao tiếp CAN to USB là một thiết bị đơn giản, được sử dụng để giám sát bus CAN. Thiết bị này sử dụng bộ vi xử lý NUC140LC1CN 32 K Cortexes-M0. Nó có cả CAN và thiết bị ngoại vi USB.
Các tính năng chính của giao tiếp CAN to USB là
- Nó rất đơn giản để thiết kế
- Kết hợp tốt với giao thức LUẬT SƯ HỎI
- Tự thể hiện như một thiết bị như FTDI USB
- Nó hỗ trợ CAN 2.0B khung hình 29 bit và CAN 2.0A 11 bit
- Nó bao gồm một bộ đệm tin nhắn bên trong (FIFO CAN)
- Nó cấp nguồn từ cổng USB
- Để cập nhật chương trình cơ sở, một thiết bị lưu trữ chung (USB thường trú Flash) được sử dụng
Sơ đồ
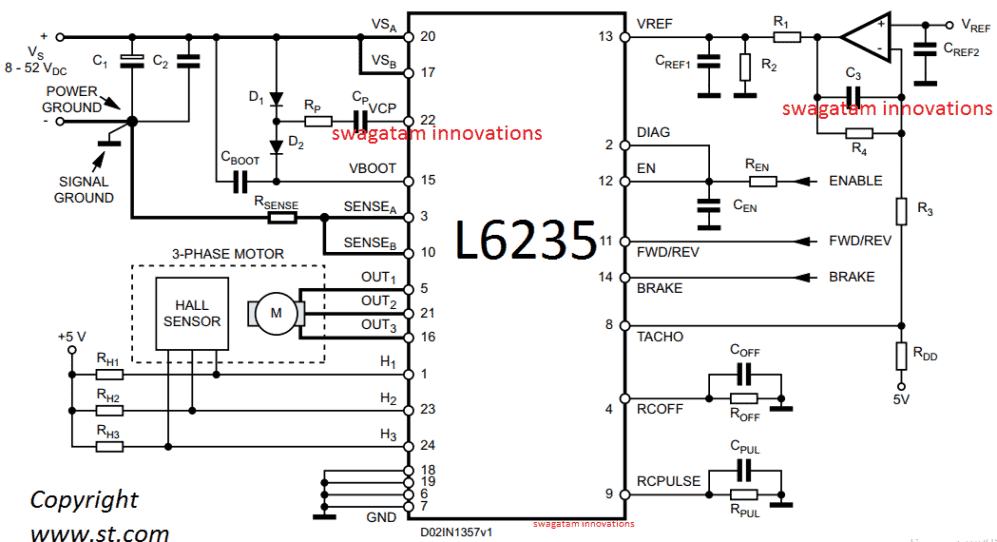
Cấu hình mạch của Giao diện CAN to USB được hiển thị bên dưới. Biến áp CAN được sử dụng để cho phép thiết bị CAN NUC140 tương tác với bus CAN. Chip TJA1051T giải quyết mục đích từ NXP. Bộ vi xử lý NUC140 có khả năng làm việc với nguồn điện 5V mà không cần thêm bộ điều chỉnh điện áp 3.3V. Sự sắp xếp thuận tiện này làm cho một tác vụ đơn giản thực hiện giao diện CAN to USB.

Sơ đồ
Mạch được xây dựng với ba đèn LED trạng thái là D1, D2 và D3.
- Ở đây trạng thái của diode D1 cho biết USB đã kết nối với máy chủ
- Ở đây trạng thái của diode D2 cho biết hoạt động của bus CAN
- Các lỗi của bus CAN có thể được chỉ ra bằng diode D3
Bộ vi xử lý NUC140 không có bộ tải khởi động tích hợp và cách tốt nhất để lập trình là chỉ sử dụng bộ lập trình Nuvoton ICP và CÁNH TAY Giao diện SWD (Serial Wire Debug). Nếu bộ tải khởi động trước đó được kết xuất với một chương trình, nó có thể được kích hoạt. Kết nối JP1 trước khi cấp nguồn cho giao diện sẽ kích hoạt bộ nạp khởi động.
Bộ nạp khởi động
Bộ nhớ flash của bộ vi xử lý NUC140LC1 được tách thành hai phần. Họ đang thực thi mã chương trình người dùng và bộ tải khởi động. Kích thước của bộ tải khởi động và thực thi chương trình người dùng là 4K và 32K. Ở đây, bộ tải khởi động thiết bị lưu trữ chung (MSD) từ Nuvoton được sử dụng để xây dựng bộ tải khởi động USB đầy đủ chức năng. Bộ tải khởi động sẽ kích hoạt bằng cách kết nối một jumper JP1. Vì vậy, cuối cùng, một ổ đĩa di động phải hiển thị trong hệ thống tệp máy chủ với kích thước 32KB. Chỉ cần sao chép và dán bản cập nhật của chương trình cơ sở CAN to USB vào ổ bộ nạp khởi động. Ngắt kết nối cáp USB, ngắt kết nối jumper và cắm lại. Bản cập nhật chương trình cơ sở mới hiện đang chạy.

Bộ nạp khởi động
Có thể lập trình giao diện USB và NuTiny-SDK-140
Lập trình bộ vi xử lý NUC140 cần ứng dụng lập trình Nuvoton ICP và lập trình Nuvoton’s Nu-Link. Nhưng ở đây NuTiny-SDK-140 (bảng demo NUC140) có sẵn từ Digi-Key. Nó bao gồm hai phần như phần lập trình Nu-Link và phần có chip NUC140. Tấm bảng này thậm chí còn được đục lỗ để tách phần của Nu-Link. Trên thực tế, bạn có thể thiết kế thiết bị này độc quyền xung quanh bảng demo NUC140, chỉ một chip thu phát CAN bổ sung sẽ là điều cần thiết.

Bảng NUC140
Vì vậy, đây là tất cả về giao diện CAN với USB bao gồm, bus CAN, giao tiếp CAN với USB, sơ đồ giản đồ, bộ nạp khởi động và bộ vi xử lý NUC140. Chúng tôi hy vọng rằng bạn đã hiểu rõ hơn về khái niệm này. Hơn nữa, mọi thắc mắc liên quan đến bài viết này vui lòng đưa ra những gợi ý quý báu của bạn bằng cách comment trong phần bình luận bên dưới. Đây là một câu hỏi cho bạn, các ứng dụng của giao diện CAN là gì?
Tín ảnh:








{kind=link}
{kind=link}
{kind=link}