Bộ khởi động mềm là bất kỳ thiết bị nào điều khiển gia tốc của động cơ điện bằng cách sử dụng điều khiển điện áp đặt vào.
Bây giờ chúng ta hãy nhắc lại ngắn gọn về sự cần thiết phải có bộ khởi động cho bất kỳ động cơ nào.
Một động cơ cảm ứng có thể tự khởi động do tương tác giữa từ thông của từ trường quay và từ thông của cuộn dây rôto, gây ra dòng điện rôto cao khi mômen xoắn tăng lên. Kết quả là, stato tạo ra dòng điện cao và vào thời điểm động cơ đạt đến tốc độ tối đa, một lượng lớn dòng điện (lớn hơn dòng định mức) được tạo ra và điều này có thể gây nóng động cơ, cuối cùng làm hỏng động cơ. Để ngăn chặn điều này, cần khởi động động cơ.
Khởi động động cơ có thể theo 3 cách
- Áp dụng điện áp đầy tải tại các khoảng thời gian: Khởi động trực tiếp trên đường dây
- Áp dụng giảm dần điện áp: Star Delta Starter và Soft starter
- Áp dụng bắt đầu cuộn dây một phần: Bộ khởi động máy biến áp tự động
Xác định khởi động mềm
Bây giờ chúng ta hãy chuyển sự chú ý đặc biệt của mình sang khởi động mềm.
Về mặt kỹ thuật, bộ khởi động mềm là bất kỳ thiết bị nào làm giảm mô-men xoắn đặt vào động cơ điện. Nó thường bao gồm các thiết bị trạng thái rắn như thyristor để điều khiển việc áp dụng điện áp cung cấp cho động cơ. Bộ khởi động hoạt động dựa trên thực tế là mô-men xoắn tỷ lệ với bình phương của dòng điện khởi động, lần lượt tỷ lệ với điện áp đặt vào. Do đó mômen và dòng điện có thể được điều chỉnh bằng cách giảm điện áp tại thời điểm khởi động động cơ.
Có thể có hai loại điều khiển bằng cách sử dụng khởi động mềm:
Mở kiểm soát : Điện áp khởi động được đặt theo thời gian, không phụ thuộc vào dòng điện kéo ra hoặc tốc độ của động cơ. Đối với mỗi pha, hai SCR được kết nối ngược trở lại và SCR được tiến hành ban đầu ở độ trễ 180 độ trong các chu kỳ nửa sóng tương ứng (mà mỗi SCR dẫn). Độ trễ này giảm dần theo thời gian cho đến khi điện áp đặt vào tăng lên bằng điện áp cung cấp đầy đủ. Đây còn được gọi là Hệ thống dốc điện áp theo thời gian. Phương pháp này không phù hợp vì nó không kiểm soát gia tốc động cơ.
Kiểm soát vòng lặp kín : Bất kỳ đặc tính đầu ra nào của động cơ như dòng điện được vẽ hoặc tốc độ được theo dõi và điện áp khởi động được sửa đổi cho phù hợp để có được phản ứng cần thiết. Dòng điện trong mỗi pha được theo dõi và nếu nó vượt quá một điểm đặt nhất định, thì đoạn dốc điện áp thời gian sẽ bị dừng lại.
Do đó, nguyên tắc cơ bản của bộ khởi động mềm là bằng cách điều khiển góc dẫn của SCR, ứng dụng của điện áp cung cấp có thể được điều khiển.
2 Các thành phần của bộ khởi động mềm cơ bản
- Công tắc nguồn như SCR cần được điều khiển theo pha để chúng được áp dụng cho từng phần của chu kỳ. Đối với động cơ 3 pha, hai SCR được nối ngược trở lại cho mỗi pha. Các thiết bị đóng cắt cần được đánh giá cao hơn điện áp đường dây ít nhất ba lần.
- Kiểm soát logic sử dụng bộ điều khiển PID hoặc Bộ vi điều khiển hoặc bất kỳ logic nào khác để điều khiển việc áp dụng điện áp cổng vào SCR, tức là điều khiển góc bắn của SCR để làm cho SCR dẫn ở phần bắt buộc của chu kỳ điện áp cung cấp.
Ví dụ làm việc của Hệ thống khởi động mềm điện tử cho động cơ cảm ứng 3 pha
Hệ thống bao gồm các thành phần sau.
- Hai SCR giáp lưng cho mỗi giai đoạn, tức là tổng cộng 6 SCR.
- Điều khiển mạch Logic ở dạng hai bộ so sánh - LM324 và LM339 để tạo ra mức và điện áp dốc và một bộ quang cách ly để điều khiển việc áp dụng điện áp cổng cho mỗi SCR trong mỗi pha.
Mạch cung cấp điện để cung cấp điện áp nguồn một chiều cần thiết.

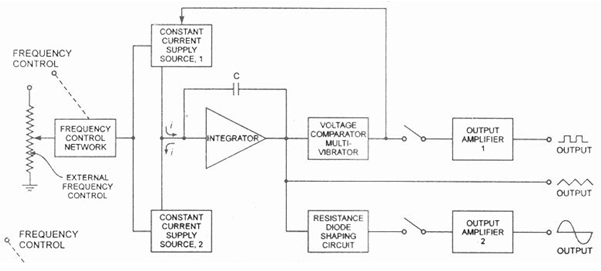
Sơ đồ khối hiển thị Hệ thống khởi động mềm điện tử cho động cơ cảm ứng 3 pha
Điện áp mức được tạo ra bằng cách sử dụng bộ so sánh LM324 có đầu cuối đảo ngược được cấp bằng nguồn điện áp cố định và đầu cuối không đảo được cấp qua tụ điện được kết nối với bộ thu của bóng bán dẫn NPN. Việc sạc và phóng điện của tụ điện làm cho đầu ra của bộ so sánh thay đổi tương ứng và mức điện áp thay đổi từ cao xuống thấp. Điện áp mức đầu ra này được áp dụng cho đầu cuối không đảo của bộ so sánh khác LM339 có đầu cuối đảo ngược được cấp bằng cách sử dụng điện áp dốc. Điện áp dốc này được tạo ra bằng cách sử dụng một bộ so sánh khác LM339 so sánh điện áp một chiều tạo xung đặt tại đầu cực nghịch đảo của nó với điện áp một chiều thuần tại đầu cực không đảo của nó và tạo ra tín hiệu tham chiếu điện áp 0 được chuyển đổi thành tín hiệu dốc bằng cách sạc và xả của một tụ điện.
3rdbộ so sánh LM339 tạo ra tín hiệu độ rộng xung Cao cho mọi điện áp mức cao, tín hiệu này giảm dần khi điện áp mức giảm. Tín hiệu này được đảo ngược và được áp dụng cho Optoisolator, cung cấp các xung cổng cho SCR. Khi mức điện áp giảm, độ rộng xung của Optoisolator tăng lên và độ rộng xung càng nhiều, độ trễ càng nhỏ và dần dần SCR được kích hoạt mà không có bất kỳ độ trễ nào. Do đó, bằng cách kiểm soát khoảng thời gian giữa các xung hoặc độ trễ giữa các ứng dụng của xung, góc bắn của SCR được kiểm soát và ứng dụng của dòng điện cung cấp được kiểm soát, do đó kiểm soát mô-men xoắn đầu ra của động cơ.
Toàn bộ quá trình là một hệ thống điều khiển vòng hở trong đó thời gian áp dụng các xung kích hoạt cổng cho mỗi SCR được kiểm soát dựa trên cách điện áp dốc giảm trước đó so với điện áp mức.
Ưu điểm của Khởi động mềm
Bây giờ chúng ta đã tìm hiểu về cách hệ thống khởi động mềm điện tử hoạt động, chúng ta hãy nhớ lại một vài lý do tại sao nó được ưa thích hơn các phương pháp khác.
- Cải thiện hiệu quả : Hiệu quả của hệ thống khởi động mềm sử dụng công tắc trạng thái rắn cao hơn do điện áp ở trạng thái thấp.
- Khởi động có kiểm soát : Dòng khởi động có thể được kiểm soát trơn tru bằng cách dễ dàng thay đổi điện áp khởi động và điều này đảm bảo khởi đầu suôn sẻ của động cơ mà không bị giật.
- Kiểm soát gia tốc : Gia tốc động cơ được kiểm soát trơn tru.
- Chi phí thấp và kích thước : Điều này được đảm bảo với việc sử dụng công tắc trạng thái rắn.