An động cơ cảm ứng là một động cơ điện xoay chiều, nó còn được đặt tên là Động cơ không đồng bộ . Rôto trong động cơ này có dòng điện tạo ra mômen xoắn từ một cảm ứng điện từ qua từ trường quay trong cuộn dây của stato. Kiểu rôto trong động cơ cảm ứng là kiểu dây quấn lồng sóc. Các đặc điểm chính của động cơ này là bò và ăn bám. Những điều này chủ yếu xảy ra do động cơ hoạt động không đúng cách có nghĩa là động cơ chạy với tốc độ thấp hơn nếu không thì nó không sử dụng tải. Bài viết này thảo luận tổng quan về Thu thập thông tin và Kết hợp của Động cơ cảm ứng
Thu thập thông tin và cố định động cơ cảm ứng
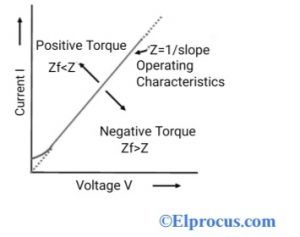
Quá trình trườn và bò của động cơ cảm ứng sẽ không nhanh hơn vì đặc tính ăn khớp của động cơ sẽ không nhanh hơn chút nào và đặc tính trườn của động cơ này sẽ ngừng tăng tốc ở một tốc độ cụ thể. Gia tốc này có thể được kiểm soát thông qua momen xoắn trong động cơ.

Thu thập thông tin và cố định động cơ cảm ứng
Cogging của động cơ cảm ứng
Các stato và rôto của động cơ cảm ứng bao gồm một tập hợp các khe. Số lượng khe cắm này không được giống nhau vì có thể động cơ ngừng chạy do đặc tính ăn mòn. Vì lý do này, số lượng rãnh trong rôto và rôto không bằng nhau, tuy nhiên, có sự thay đổi đối với các tần số rãnh tương ứng thông qua tần số hài để gây ra mô-men xoắn điều chế . Các khe được xoắn để duy trì sự chồng chéo trên tất cả các khe để giảm vấn đề này.
Các phương pháp để vượt qua sự mắc kẹt là gì?
Có nhiều phương pháp khác nhau có thể được áp dụng để giải quyết vấn đề cogging.
- Số lượng rãnh bên trong stato cũng như rôto không được bằng nhau.
- Việc bố trí các rãnh rôto xiên có thể được thực hiện theo cách mà nó có thể nghiêng qua trục quay.
Thu thập thông tin của động cơ cảm ứng
Đặc điểm thứ hai của động cơ cảm ứng là bò. Khe hở trong động cơ có thể được phát triển với từ thông điều hòa vì từ trường của động cơ cảm ứng. Các điều hòa từ thông trong động cơ sẽ tạo ra một trường mômen phụ.
Một sự cố thông thường có thể xảy ra do sóng hài thứ bảy sẽ tạo ra từ trường mômen quay thuận ở tốc độ 1/7 của đồng bộ. Mômen cực đại của động cơ chỉ dưới 1/7 Ns. Nếu nó đủ cao, thì mô-men xoắn thực sẽ cao hơn so với mô-men xoắn vì tần số dòng tại bất kỳ nơi nào có độ trượt ở 1/7 N là cao. Khi tốc độ đồng bộ của động cơ dưới 1/7 thì có thể xảy ra hiện tượng bò.
Lý do thu thập thông tin trong động cơ cảm ứng
Bò trong động cơ cảm ứng có thể do một số nguyên nhân bao gồm những nguyên nhân sau.
- Nó có thể được gây ra do sự hiện diện của sóng hài không gian trong thông lượng khe hở không khí.
- Sóng hài khe hở không khí có thể xảy ra do sự chia sẻ không đồng đều của cuộn dây Stator.
- Sự khác biệt về điện trở khe hở không khí có thể xảy ra do các khe trong Stator & Rotor.
Làm thế nào để tránh bò trong động cơ cảm ứng?
Trong động cơ cảm ứng, việc bò ít hơn do mô-men xoắn khởi động cao. Vì vậy, có thể tránh được hiện tượng bò và mắc kẹt trong động cơ rôto lồng thông qua việc lựa chọn chiều dài cuộn dây phù hợp và uốn nhẹ các răng của rôto. Vì vậy, có thể tránh hoặc giảm thiểu việc thu thập thông tin bằng cách chọn sự kết hợp phù hợp giữa các khe của stato và rôto
Do đó, đây là tất cả về tổng quan về thu thập thông tin và mã hóa động cơ cảm ứng . Việc thu thập thông tin của động cơ này có thể xảy ra ở một phần tốc độ định mức trong khi động cơ này có thể xảy ra nếu không. của các rãnh stato là một số rãnh của rôto quan trọng. Đây là một câu hỏi dành cho bạn, trong động cơ nào, việc thu thập thông tin và cogging không chiếm ưu thế?