Các IC dòng TSOP17XX là các thiết bị cảm biến hồng ngoại đặc biệt được chế tạo để đáp ứng các dải tần số hồng ngoại cụ thể và chuyển đổi nó thành một đầu ra xung điện. Do đó, nó có tính năng miễn nhiễm tuyệt đối với các dạng tín hiệu IR khác.
Do tần số hoạt động trung tâm hoặc thông dải cụ thể này của TSOP17XX, rất khó sử dụng các cảm biến này để thiết kế mạch điều khiển từ xa dựa trên tần số mong muốn hoặc tùy chỉnh.
Trong bài đăng này, chúng tôi sẽ cố gắng tìm ra ý tưởng cho phép các cảm biến này hoạt động với bất kỳ tần số duy nhất mong muốn nào để mạch có thể được tạo ra hoàn toàn dễ dàng.
Nguyên lý làm việc cơ bản của mô-đun cảm biến TSOP17XX
Nếu chúng ta tham khảo biểu dữ liệu của cảm biến TSOP17XX IR chúng tôi thấy rằng vi mạch có một số hướng dẫn vận hành quan trọng để đảm bảo cảm biến hoạt động chính xác và tối ưu khi phản ứng với tín hiệu hồng ngoại.
Để cho phép cảm biến hoạt động chính xác, tín hiệu IR phải được dao động ở giá trị tần số trung tâm băng thông của thiết bị và được điều chế ở các cụm từ 10 đến 70 chu kỳ, với một khoảng cách nhất định sau mỗi chu kỳ, như thể hiện trong hình ảnh sau đây.

Hình ảnh trên cho thấy rõ ràng rằng chùm tia hồng ngoại từ Tx phải được tạo xung với tần số trung tâm của vi mạch thường nằm trong khoảng từ 30kHz đến 39kHx, và được điều chế với các chùm khoảng cách 10ms.
TSOP đáp ứng tín hiệu tần số trung tâm này và kích hoạt BẬT, tạo ra một dạng sóng sao chép ở đầu ra của nó, trong đó 38kHz được san bằng thành các xung sóng vuông thông thường.
Dạng sóng hoạt động phức tạp này đảm bảo tăng khả năng miễn nhiễm chống lại nhiều tần số giả có thể có trong khí quyển phát ra từ bóng đèn, CFL lke, đèn huỳnh quang, v.v.
Mặt hạn chế của cảm biến TSOP17XX
Mặc dù cảm biến có tính năng hoạt động dễ dàng do mô hình tiếp nhận tín hiệu phức tạp này, tần số trung tâm cố định cho cảm biến TSOP chỉ giới hạn việc sử dụng chúng trong phạm vi tần số cụ thể này, do đó không thể tạo mạch điều khiển từ xa IR tùy chỉnh độc đáo bằng cách sử dụng các chip này.
Do nhược điểm này, hệ thống điều khiển từ xa dựa trên TSOP thường có thể được vận hành bằng bất kỳ thiết bị cầm tay điều khiển từ xa TV hoặc DVD thông thường nào và sử dụng bất kỳ nút nào trên thiết bị điều khiển.
Tuy nhiên, trong thiết bị điện tử luôn có một cách giải quyết cho mọi thứ và đối với những cảm biến này, chúng tôi có thể tạo ra một thiết kế cho phép chúng tôi sử dụng vi mạch với tần số duy nhất đã chọn do chúng tôi lựa chọn để bộ thu chỉ được chuyển qua một cặp Tx tương thích cụ thể và không với bất kỳ thiết bị cầm tay từ xa thông thường nào.
Thiết kế mạch điều khiển từ xa TSOP dựa trên tần số duy nhất
Từ cuộc thảo luận ở trên, chúng tôi hiểu rằng cảm biến dựa trên TSOP yêu cầu các cụm tần số 38kHz hoặc tần số trung tâm được chỉ định để hoạt động, điều này cho thấy rằng tín hiệu liên quan đến hai tần số trong đó tần số trung tâm là không đổi nhưng tần số bùng phát có thể thay đổi và không quan trọng .
Ý tưởng là nắm bắt tần số liên tục này có lợi cho chúng tôi và sử dụng bộ lọc có thể nhận ra tần số này để kích hoạt đầu ra.
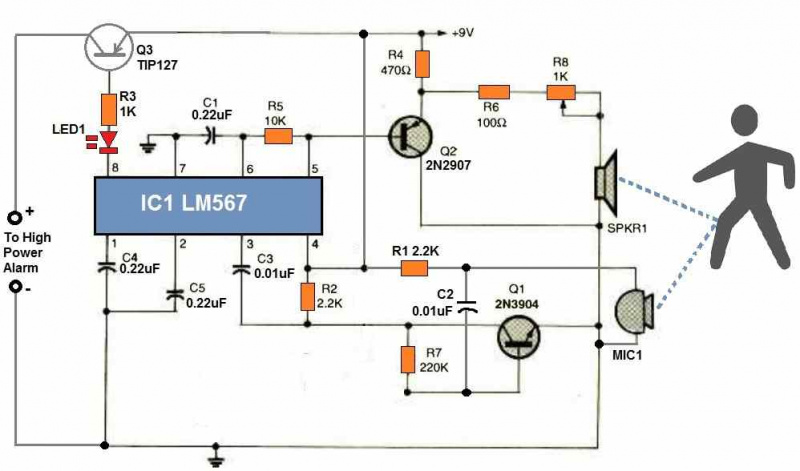
Mạch lọc có thể được thiết kế dễ dàng bằng cách sử dụng Mạch giải mã âm sắc LM567 và sử dụng nó để giải mã một tần số liên tục cụ thể từ đầu ra cảm biến TSOP ở phía máy thu.
Khái niệm cơ bản có thể được chứng kiến trong sơ đồ sau đây.
Sơ đồ mạch 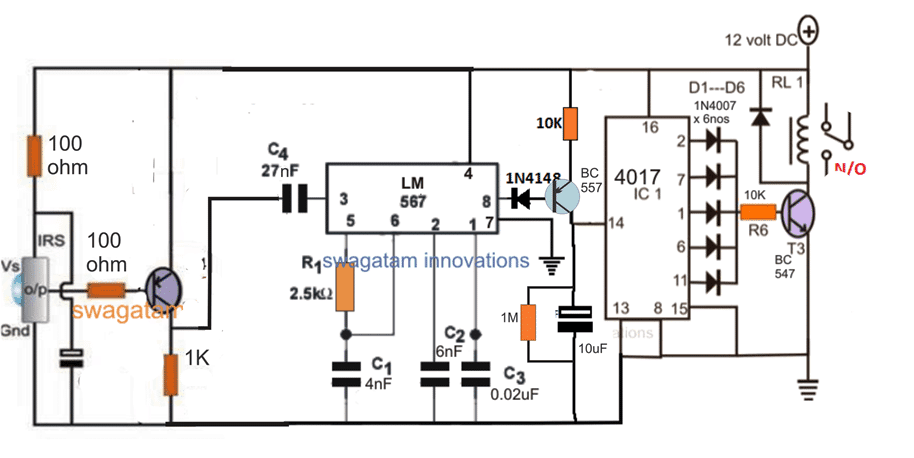

Hoạt động mạch
Tham khảo sơ đồ mạch triển khai TSOP17XX với tần số tùy chỉnh ở trên, chúng ta thấy nó bao gồm 3 giai đoạn cơ bản:
- giai đoạn cảm biến TSOP17XX
- giai đoạn dò tần số dựa trên LM567
- và giai đoạn mạch flip flop hoặc mạch bistable dựa trên IC 4017.
Giai đoạn TSOP17XX được định cấu hình ở chế độ tiêu chuẩn, lấy tần số 38kHz đã được điều chế từ bộ Tx của máy phát và tạo ra một sóng vuông xung như được chỉ ra trong sơ đồ đầu tiên.
Đầu ra này từ TSOP có thể được mong đợi mang tần số cụm mà chúng tôi quan tâm. Điều này có thể được đặt thành 1kHz, 2kHz hoặc bất kỳ thứ gì dưới 10kHz.
Bây giờ chúng ta muốn tầng bộ giải mã âm LM567 của chúng tôi phát hiện chính xác tần số điều chế này, do đó chúng tôi phải đảm bảo rằng R1 / C1 của tầng LM567 được tính toán sao cho bộ dao động bên trong khóa vào cùng một tần số khớp với tần số điều chế bùng phát từ đầu ra TSOP .
Khi các tham số này được thiết lập, chúng ta có thể mong đợi LM567 sẽ chốt ON ngay khi tần số đã chọn được phát hiện từ đầu ra TSOP78XX, trong khi bất kỳ tần số điều chế nào khác chỉ bị từ chối.
Khi phát hiện một tần số được chỉ định chính xác, đầu ra LM567 tạo ra tín hiệu kích hoạt thấp tương ứng tại chân # 8 của nó, kích hoạt chân đầu vào flip flop # 14 dựa trên IC 4017 được gắn vào thông qua PNP.
Bằng cách này, chúng tôi có thể chỉ định các tần số duy nhất khác nhau để đảm bảo rằng việc kích hoạt bộ thu chỉ được bật thông qua thiết bị cầm tay Tx phù hợp chứ không phải với bất kỳ thiết bị điều khiển từ xa TV thông thường nào.
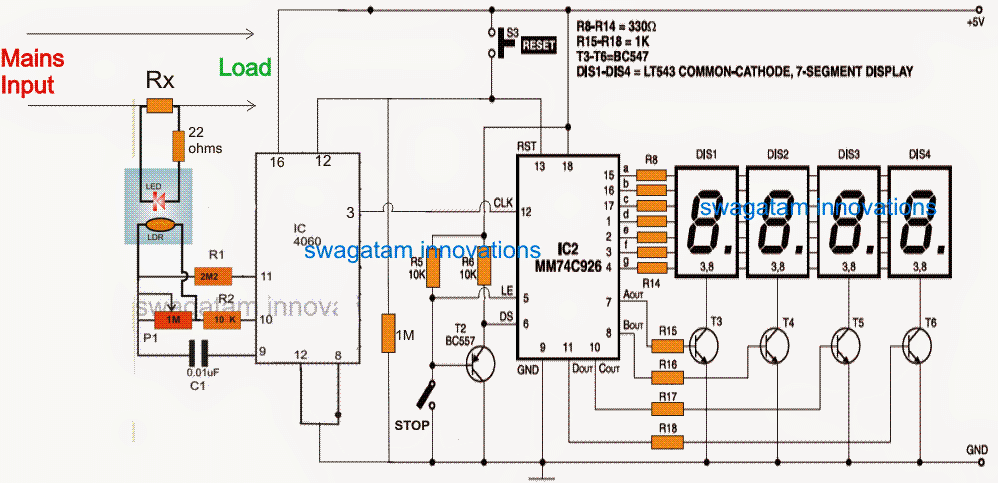
Tạo mạch phát tùy chỉnh (Tx)
Trong phần thảo luận ở trên, chúng ta đã tìm hiểu cách một cảm biến TSOP17XX có thể hoạt động với tần số tùy chỉnh bằng cách sử dụng giai đoạn dò tần số, tuy nhiên điều này cũng có nghĩa là bộ phát (Tx) cũng sẽ cần được xây dựng duy nhất để tạo ra các tín hiệu IR tùy chỉnh.
Hình sau đây cho thấy cách thực hiện điều này bằng cách sử dụng một IC 4049 và một vài phần tử thụ động:

6 cổng đều từ IC 4049, R3 có thể là điện trở 10K trong khi các giá trị đặt trước có thể là 100K. Các nắp C1 sẽ cần được chọn với một số thí nghiệm thực tế. Diode có thể là 1N4148, các điện trở còn lại có thể được chọn 2K2.
Như có thể thấy cặp cổng trên cùng với R3, cài sẵn và C1 được cấu hình như một bộ dao động chạy tự do, phần dưới cũng có một tầng giống hệt nhau.
Phần trên được đưa đến một cổng đệm trung gian mà đầu ra của nó cuối cùng được kết nối với điốt quang IR của máy phát.
Toàn bộ phần được cấu hình để tạo tần số trung tâm cơ bản cho khả năng tương thích TSOP17XX, tần số này có thể nằm trong khoảng từ 32kHz đến 38kHz tùy thuộc vào thông số kỹ thuật của cảm biến đã chọn.
Bộ dao động dưới được coi là một tầng điều biến tần số thấp có thể được nhìn thấy tích hợp với phần trên thông qua một diode. Tần số thấp này sẽ chuyển đổi tần số cao trên để tạo ra '38kHz bùng nổ' cần thiết trên diode máy phát IR.
Tần số thấp này thực sự trở thành tần số duy nhất của chúng tôi hoặc tần số điều khiển từ xa được tùy chỉnh dự kiến cần phải được khớp với tần số LM567 để cả hai tần số 'bắt tay nhau' trong quá trình giao tiếp IR giữa các đơn vị Tx và Rx.
Tần số thấp có thể được chọn từ bất kỳ đâu trong khoảng từ 1kHz đến 10kHz và dải tần đã chọn này phải được thiết lập chính xác cho giai đoạn LM567 bằng cách điều chỉnh thích hợp các giá trị R1 / C1 của nó.
Phần này kết thúc cuộc thảo luận của chúng ta về cách sửa đổi mạch cảm biến TSOP17XX để đáp ứng các dải tần số đặc biệt tùy chỉnh hoặc các dải tần số được chọn duy nhất để làm cho hệ thống điều khiển từ xa hoàn toàn an toàn và cá nhân.
Nếu bạn có bất kỳ nghi ngờ nào về khái niệm này, hộp bình luận là của bạn!
Trước: Giới thiệu về cảm biến màu RGB TCS3200 Tiếp theo: Mạch dò màu với mã Arduino