IC TL494 là một IC điều khiển PWM đa năng, có thể được ứng dụng theo nhiều cách khác nhau trong các mạch điện tử. Trong bài viết này, chúng tôi thảo luận chi tiết về các chức năng chính của IC và cách sử dụng nó trong các mạch thực tế.
Mô tả chung
IC TL494 được thiết kế đặc biệt cho các mạch ứng dụng điều chế độ rộng xung chip đơn. Thiết bị này chủ yếu được tạo ra cho các mạch điều khiển nguồn điện, có thể được đo kích thước hiệu quả bằng cách sử dụng vi mạch này.
Thiết bị đi kèm với một bộ dao động biến đổi tích hợp, một giai đoạn điều khiển thời gian chết (DTC), kiểm soát lật cho điều khiển xung, một độ chính xác Bộ điều chỉnh 5 V , hai ampe báo lỗi, và một số mạch đệm đầu ra.
Bộ khuếch đại lỗi có dải điện áp chế độ phổ biến từ - 0,3 V đến VCC - 2V.
Kiểm soát thời gian chết người so sánh được đặt với giá trị bù cố định để cung cấp khoảng thời gian chết không đổi 5%.
Chức năng tạo dao động trên chip có thể bị ghi đè bằng cách kết nối chân RT # 14 của IC với chân tham chiếu # 14 và bằng cách cung cấp tín hiệu răng cưa bên ngoài tới chân CT # 5. Cơ sở này cũng cho phép điều khiển đồng bộ nhiều IC TL494 có đường ray cấp nguồn khác nhau.
Các bóng bán dẫn đầu ra bên trong chip có đầu ra nổi được sắp xếp để cung cấp một bộ phát chung đầu ra hoặc một cơ sở đầu ra theo emitter-follower.
Thiết bị cho phép người dùng có được kiểu kéo đẩy hoặc dao động kết thúc đơn trên các chân đầu ra của nó bằng cách định cấu hình thích hợp chân # 13, là chân chức năng điều khiển đầu ra.
Mạch bên trong làm cho bất kỳ đầu ra nào không thể tạo ra xung kép, trong khi IC có dây ở chức năng push-pull.
Chức năng và cấu hình ghim
Sơ đồ và giải thích sau đây cung cấp cho chúng ta thông tin cơ bản về chức năng chân của IC TL494.

- Pin # 1 và Pin # 2 (1 IN + và 1IN-): Đây là các loại không đảo và đảo đầu vào của bộ khuếch đại lỗi (op amp 1).
- Pin # 16, Pin # 15 (1 IN + và 1IN-): Như trên đây là các loại không đảo và đảo đầu vào của bộ khuếch đại lỗi (op amp 2).
- Pin # 8 và Pin # 11 (C1, C2): Đây là đầu ra 1 và 2 của IC kết nối với bộ thu của bóng bán dẫn bên trong tương ứng.
- Chân số 5 (CT): Chân này cần được kết nối với tụ điện bên ngoài để cài đặt tần số dao động.
- Chân số 6 (RT): Chân này cần được kết nối với một điện trở bên ngoài để thiết lập tần số dao động.
- Pin # 4 (DTC): Đó là đầu vào của bộ khuếch đại op bên trong điều khiển hoạt động thời gian chết của vi mạch.
- Pin # 9 và Pin # 10 (E1 và E2): Đây là đầu ra của IC kết nối với các chân cực phát của bóng bán dẫn bên trong.
- Pin # 3 (Phản hồi): Như tên cho thấy, điều này đầu vào pin được sử dụng để tích hợp với tín hiệu mẫu đầu ra để điều khiển tự động hệ thống mong muốn.
- Chân số 7 (Ground): Chân này là chân nối đất của IC, cần kết nối với 0 V của nguồn cấp.
- Chân số 12 (VCC): Đây là chân cấp nguồn tích cực của IC.
- Chân # 13 (O / P CNTRL): Chân này có thể được cấu hình để kích hoạt đầu ra của IC ở chế độ đẩy-kéo hoặc chế độ kết thúc đơn.
- Pin # 14 (REF): Cái này đầu ra chân cung cấp một đầu ra 5V không đổi có thể được sử dụng để sửa chữa điện áp tham chiếu cho lỗi op amps, trong chế độ so sánh.
Xếp hạng tối đa tuyệt đối
- (VCC) Điện áp cung cấp tối đa không vượt quá = 41 V
- (VI) Điện áp tối đa trên các chân đầu vào không được vượt quá = VCC + 0,3 V
- (VO) Điện áp đầu ra tối đa tại cực thu của bóng bán dẫn bên trong = 41 V
- (IO) Dòng điện tối đa trên Bộ thu của bóng bán dẫn bên trong = 250 mA
- Nhiệt hàn chân IC tối đa ở cách 1,6 mm (1/16 inch) từ thân IC không quá 10 giây @ 260 ° C
- Tstg Phạm vi nhiệt độ bảo quản = –65/150 ° C
Điều kiện hoạt động được đề xuất
Dữ liệu sau cung cấp cho bạn các điện áp và dòng điện được khuyến nghị có thể được sử dụng để vận hành IC trong các điều kiện an toàn và hiệu quả:
- Nguồn cung cấp VCC: 7 V đến 40 V
- VI Điện áp đầu vào Bộ khuếch đại: -0,3 V đến VCC - 2 V
- Điện áp thu của bóng bán dẫn VO = 40, Dòng điện thu cho mỗi bóng bán dẫn = 200 mA
- Dòng điện vào chân phản hồi: 0,3 mA
- fOSC Dải tần số dao động: 1 kHz đến 300 kHz
- Giá trị tụ điện định thời của Bộ dao động CT: Từ 0,47 nF đến 10000 nF
- RT Giá trị điện trở định thời bộ dao động: Từ 1,8 k đến 500 k Ohms.
Sơ đồ bố cục bên trong

Cách sử dụng IC TL494
Trong các đoạn sau, chúng ta tìm hiểu các chức năng quan trọng của IC TL494 và cách sử dụng nó trong các mạch PWM.
Tổng quat: IC TL494 được thiết kế theo cách mà nó không chỉ có tính năng mạch điện quan trọng cần thiết để điều khiển nguồn điện chuyển mạch, mà còn giải quyết một số khó khăn cơ bản và giảm thiểu nhu cầu của các giai đoạn mạch bổ sung cần thiết trong cấu trúc tổng thể.
TL494 về cơ bản là một mạch điều khiển tần số cố định-độ rộng-điều chế (PWM).
Chức năng điều chế của xung đầu ra đạt được khi bộ dao động bên trong so sánh dạng sóng răng cưa của nó thông qua tụ định thời (CT) với cả hai cặp tín hiệu điều khiển.
Giai đoạn đầu ra được bật tắt trong khoảng thời gian điện áp răng cưa cao hơn tín hiệu điều khiển điện áp.
Khi tín hiệu điều khiển tăng lên, thời gian đầu vào răng cưa cao hơn giảm do đó, độ dài xung đầu ra giảm.
Một flip-flop điều khiển xung luân phiên dẫn xung được điều chế đến từng bóng bán dẫn đầu ra.
Bộ điều chỉnh tham chiếu 5-V
TL494 tạo ra một tham chiếu bên trong 5 V được cấp cho chân REF.
Tham chiếu nội bộ này giúp phát triển tham chiếu không đổi ổn định, hoạt động giống như một bộ điều chỉnh trước để đảm bảo nguồn cung cấp ổn định. Tham chiếu này sau đó được sử dụng một cách đáng tin cậy để cấp nguồn cho các giai đoạn bên trong khác nhau của vi mạch như điều khiển đầu ra logic, điều khiển xung lật, bộ dao động, bộ so sánh điều khiển thời gian chết và bộ so sánh PWM.
Dao động
Bộ dao động tạo ra một dạng sóng răng cưa dương cho thời gian chết và bộ so sánh PWM để các giai đoạn này có thể phân tích các tín hiệu đầu vào điều khiển khác nhau.
Đó là RT và CT chịu trách nhiệm xác định tần số dao động và do đó có thể được lập trình bên ngoài.
Dạng sóng răng cưa được tạo ra bởi bộ dao động tích điện cho tụ điện định thời bên ngoài CT với một dòng điện không đổi, được xác định bởi điện trở bổ sung RT.
Điều này dẫn đến việc tạo ra một dạng sóng điện áp dốc tuyến tính. Mỗi khi điện áp trên CT đạt đến 3 V, bộ dao động sẽ nhanh chóng phóng điện nó, sau đó sẽ khởi động lại chu kỳ sạc. Dòng điện cho chu kỳ sạc này được tính theo công thức:
Icharge = 3 V / RT --------------- (1)
Chu kỳ của dạng sóng răng cưa được cho bởi:
T = 3 V x CT / Icharge ---------- (2)
Do đó, tần số dao động được xác định bằng công thức:
f OSC = 1 / RT x CT --------------- (3)
Tuy nhiên, tần số dao động này sẽ tương thích với tần số đầu ra khi đầu ra được cấu hình là một đầu. Khi được cấu hình ở chế độ push-pull, tần số đầu ra sẽ bằng 1/2 tần số dao động.
Do đó, đối với đầu ra kết thúc đơn, phương trình số 3 ở trên có thể được sử dụng.
Đối với ứng dụng kéo đẩy, công thức sẽ là:
f = 1 / 2RT x CT ------------------ (4)
Kiểm soát thời gian chết
Thiết lập chốt thời gian chết quy định thời gian chết tối thiểu ( khoảng thời gian tắt giữa hai đầu ra ).
Trong chức năng này khi điện áp trên chân DTC vượt quá điện áp dốc từ bộ dao động, buộc bộ so sánh đầu ra phải TẮT các bóng bán dẫn Q1 và Q2.
IC có mức bù đặt bên trong là 110 mV đảm bảo thời gian chết tối thiểu khoảng 3% khi chân DTC được kết nối với đường dây nối đất.
Đáp ứng thời gian chết có thể được tăng lên bằng cách đặt điện áp bên ngoài vào chân DTC # 4. Điều này cho phép kiểm soát tuyến tính đối với hàm thời gian chết từ 3% mặc định đến tối đa 100%, thông qua đầu vào biến đổi từ 0 đến 3,3 V.
Nếu sử dụng điều khiển toàn dải, có thể điều chỉnh đầu ra của IC thông qua điện áp bên ngoài mà không làm ảnh hưởng đến cấu hình bộ khuếch đại lỗi.
Tính năng thời gian chết có thể được sử dụng trong các tình huống cần kiểm soát thêm chu kỳ nhiệm vụ đầu ra.
Nhưng để hoạt động bình thường, phải đảm bảo rằng đầu vào này được kết nối với mức điện áp hoặc nối đất và không bao giờ được để nổi.
Bộ khuếch đại lỗi
Hai bộ khuếch đại lỗi của IC có độ lợi cao, và được phân cực qua đường cung cấp VI của IC. Điều này cho phép phạm vi đầu vào chế độ chung từ -0,3 V đến VI - 2 V.
Cả hai bộ khuếch đại lỗi đều được thiết lập bên trong để hoạt động giống như bộ khuếch đại nguồn đơn một đầu, trong đó mỗi đầu ra chỉ có khả năng hoạt động cao. Do khả năng này, các bộ khuếch đại có thể kích hoạt độc lập để đáp ứng nhu cầu PWM thu hẹp.
Vì đầu ra của hai ampe lỗi được gắn như Cổng HOẶC với nút đầu vào của bộ so sánh PWM, bộ khuếch đại có thể hoạt động với xung ra tối thiểu chiếm ưu thế.
Các bộ khuếch đại có đầu ra được phân cực với dòng chìm thấp để đầu ra IC đảm bảo PWM tối đa khi bộ khuếch đại lỗi ở chế độ không hoạt động.
Đầu vào kiểm soát đầu ra
Chân này của IC có thể được cấu hình để cho phép đầu ra IC hoạt động ở một chế độ kết thúc duy nhất mà cả hai đầu ra đều dao động song song hoặc theo cách kéo đẩy tạo ra các đầu ra dao động luân phiên.
Chân điều khiển đầu ra hoạt động không đồng bộ, cho phép nó kiểm soát trực tiếp đầu ra của IC, mà không ảnh hưởng đến giai đoạn dao động bên trong hoặc giai đoạn điều khiển xung flip flop.
Chân này thường được định cấu hình với một tham số cố định theo thông số kỹ thuật của ứng dụng. Ví dụ, nếu các đầu ra IC được thiết kế để làm việc song song hoặc kết thúc đơn lẻ, thì chân điều khiển đầu ra được kết nối vĩnh viễn với đường dây nối đất. Do đó, giai đoạn điều khiển xung bên trong IC bị vô hiệu hóa và flip flop thay thế dừng lại ở các chân đầu ra.
Ngoài ra, trong chế độ này, các xung đến bộ điều khiển thời gian chết và bộ so sánh PWM được mang cùng nhau bởi cả hai bóng bán dẫn đầu ra, cho phép đầu ra chuyển đổi BẬT / TẮT song song.
Để có được hoạt động đầu ra kéo đẩy, chân điều khiển đầu ra chỉ cần được kết nối với chân tham chiếu đầu ra + 5V (REF) của IC. Trong điều kiện này, mỗi bóng bán dẫn đầu ra lần lượt BẬT thông qua giai đoạn lật hướng xung.
Bóng bán dẫn đầu ra
Như có thể thấy sơ đồ thứ hai từ trên xuống, chip bao gồm hai bóng bán dẫn đầu ra, có các đầu cuối cực phát và cực thu không được cam kết.
Cả hai thiết bị đầu cuối nổi này đều được đánh giá là có thể chìm (nhận vào) hoặc cấp nguồn (cho ra) dòng điện lên đến 200 mA.
Điểm bão hòa của bóng bán dẫn nhỏ hơn 1,3 V khi được định cấu hình ở chế độ bộ phát chung và nhỏ hơn 2,5 V ở chế độ người thu tiền chung chế độ.
Chúng được bảo vệ bên trong khỏi ngắn mạch và quá dòng.
Mạch ứng dụng
Như đã giải thích ở trên, TL494 chủ yếu là một vi mạch điều khiển PWM, do đó các mạch ứng dụng chính hầu hết là các mạch dựa trên PWM.
Một số mạch ví dụ được thảo luận dưới đây, có thể được sửa đổi theo nhiều cách khác nhau tùy theo yêu cầu riêng.
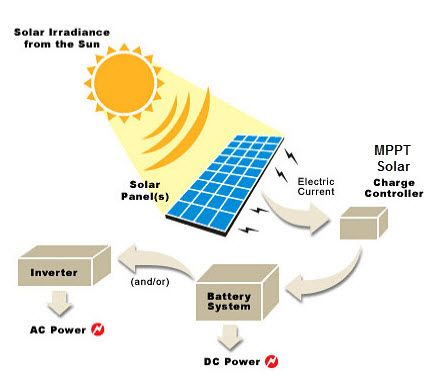
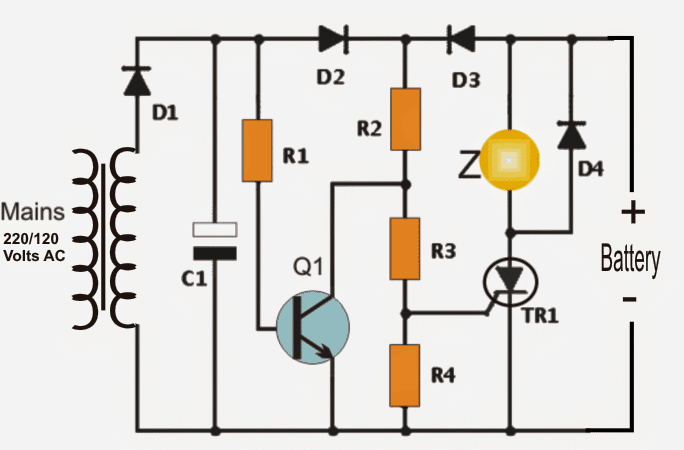
Bộ sạc năng lượng mặt trời sử dụng TL494
Thiết kế sau đây cho thấy TL494 có thể được định cấu hình hiệu quả như thế nào để tạo nguồn cấp điện buck chuyển mạch 5-V / 10-A.
Trong cấu hình này, đầu ra hoạt động ở chế độ song song, và do đó chúng ta có thể thấy chân điều khiển đầu ra # 13 được kết nối với đất.
Hai ampe báo lỗi cũng được sử dụng rất hiệu quả ở đây. Một bộ khuếch đại lỗi điều khiển phản hồi điện áp qua R8 / R9 và giữ đầu ra không đổi ở tốc độ mong muốn (5V)
Bộ khuếch đại lỗi thứ hai được sử dụng để kiểm soát dòng điện tối đa qua R13.

Biến tần TL494
Đây là một mạch biến tần cổ điển được xây dựng xung quanh IC TL494. Trong ví dụ này, đầu ra được cấu hình để hoạt động theo cách kéo đẩy, và do đó chân điều khiển đầu ra ở đây được kết nối với tham chiếu + 5V, đạt được từ chân số 14. Đầu tiên của các chân cũng được cấu hình chính xác như được mô tả trong biểu dữ liệu ở trên.

Phần kết luận
IC TL494 là một IC điều khiển PWM với các cơ sở điều khiển phản hồi và đầu ra có độ chính xác cao đảm bảo điều khiển xung lý tưởng cho bất kỳ ứng dụng mạch PWM mong muốn nào.
Nó tương tự như SG3525 theo nhiều cách và có thể được sử dụng như một sự thay thế hiệu quả cho nó, mặc dù số pin có thể khác nhau và không tương thích chính xác.
Nếu bạn có bất kỳ câu hỏi nào liên quan đến vi mạch này, vui lòng hỏi họ thông qua các bình luận bên dưới, tôi sẽ sẵn lòng trợ giúp!
Tài liệu tham khảo: Biểu dữ liệu TL494
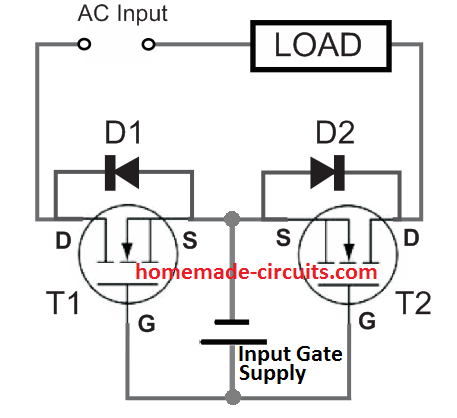
Trước: Tìm hiểu Quy trình BẬT MOSFET Tiếp theo: Các loại bảng Arduino với thông số kỹ thuật