
WSG-DSA là một ngón tay kẹp tích hợp cảm biến xúc giác để có phản hồi cấu hình độ phân giải cao trong quá trình cầm nắm. Đối với mục đích cảm biến, nó sử dụng đầu dò xúc giác thông minh DSA9205i. Nó phù hợp trên đầu các hàm cơ sở của WSG và được giao tiếp thẳng với bộ điều khiển bộ kẹp thông qua cổng cảm biến tích hợp bên trong các hàm cơ sở để không cần các thành phần và cáp bên ngoài để đưa thiết bị xúc giác vào các ứng dụng xử lý của bạn. Các loại cảm biến ngón tay này được WSG phát hiện và tham số tự động. Cấu hình áp suất có thể được sử dụng từ bên trong bộ điều khiển kẹp bằng cách sử dụng giao diện kịch bản mạnh mẽ. Bài viết này thảo luận về các loại xúc giác cảm biến và hoạt động của chúng .
Cảm biến Xúc giác là gì?
Cảm biến xúc giác là một thiết bị. Nó đo lường thông tin đến để phản ứng với tương tác vật lý với môi trường. Cảm giác xúc giác ở con người thường được mô hình hóa, tức là cảm giác da và cảm giác động học. Cảm ứng da có khả năng phát hiện các kích thích do kích thích cơ học, đau và nhiệt độ. Cảm ứng động học nhận đầu vào cảm biến từ các thụ thể có bên trong cơ, gân và khớp.

Cảm biến xúc giác
Các loại cảm biến xúc giác
Có các loại cảm biến xúc giác khác nhau được đưa ra bên dưới
- Cảm biến lực / mô-men xoắn
- Cảm biến động
- Cảm biến nhiệt
Cảm biến lực / mô-men xoắn
Cảm biến lực / mô-men xoắn được sử dụng kết hợp với một mảng xúc giác để cung cấp thông tin cho việc kiểm soát lực. Những các loại cảm biến có thể cảm nhận tải ở bất kỳ đâu như liên kết xa của một bộ điều khiển và trong các ràng buộc như một cảm biến da. Cảm biến da thường cung cấp phép đo lực chính xác hơn ở băng thông cao hơn. Nếu liên kết của người thao tác được xác định chung và tiếp xúc điểm tín hiệu được giả định, thì cảm biến lực / mô-men xoắn có thể cung cấp thông tin về vị trí tiếp xúc của lực và mômen - nó được gọi là cảm giác xúc giác nội tại. Hình ảnh của cảm biến mô-men xoắn được hiển thị bên dưới.

Cảm biến lực hoặc mô-men xoắn
Cảm biến động
Cảm biến động nhỏ hơn máy đo gia tốc ở các dải ngón tay hoặc ở da của ngón tay rô bốt. Chức năng chung giống như tiểu thể Pacinian ở người và có các trường tương ứng lớn như nhau, do đó một hoặc hai máy đo gia tốc da là đủ cho toàn bộ ngón tay. Các cảm biến này phát hiện hiệu quả việc tạo và phá vỡ tiếp xúc, các rung động liên quan đến việc trượt trên các bề mặt kết cấu.

Cảm biến động
Cảm biến tốc độ căng thẳng là loại cảm biến xúc giác động thứ hai. Nếu đầu ngón tay trượt với tốc độ vài cm / s tổng thể là những vết sưng hoặc rỗ nhỏ trên bề mặt thì những thay đổi tạm thời trên da trở nên quan trọng. Một áp điện polyme chẳng hạn như PVDF tạo ra một điện tích để phản ứng với thiệt hại có thể được áp dụng để tạo ra dòng điện, tỷ lệ thuận với phạm vi thay đổi.
Cảm biến nhiệt
Cảm biến nhiệt rất quan trọng đối với khả năng con người xác định vật liệu của các vật thể được tạo ra, nhưng một số cảm biến cũng được sử dụng trong chế tạo robot. Cảm biến nhiệt liên quan đến việc phát hiện các gradient nhiệt trên da, tương ứng với cả nhiệt độ và độ dẫn nhiệt của một vật thể. Cảm biến nhiệt rô bốt tham gia vào các mối nối Peltier kết hợp với Thermistors .

Cảm biến nhiệt
Nguyên lý làm việc và Sơ đồ mạch của Cảm biến Xúc giác
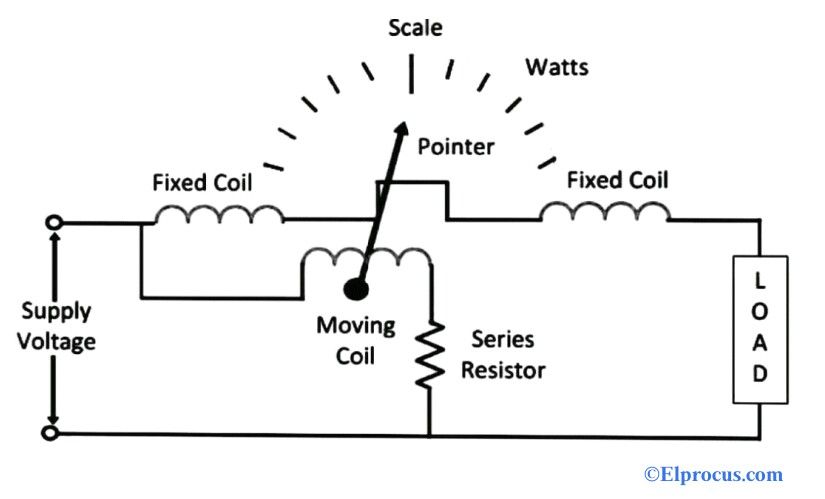
Các cảm biến xúc giác được phát triển để cung cấp khả năng cảm nhận xúc giác cho người thao tác từ xa và robot thông minh. Cảm biến xúc giác có thể xác định một lực bình thường tác dụng lên các pixel xúc giác để mê hoặc điều khiển lực và hình ảnh xúc giác và để tạo ra nhận dạng đối tượng. Tuy nhiên, để có được hình ảnh xúc giác và lực bình thường, thông tin về tiếp tuyến là rất quan trọng đối với việc kiểm soát lực và ngăn chặn trượt, điều này giúp đạt được thành công trong nhiệm vụ - do đó, cần phải có các cảm biến xúc giác ba chiều.

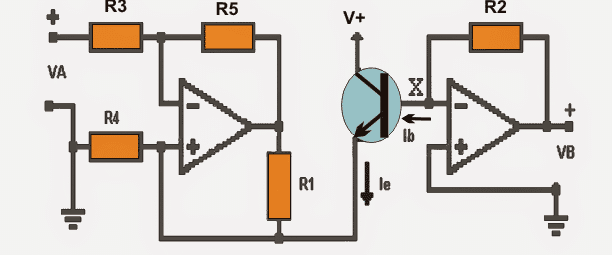
Sơ đồ mạch của cảm biến xúc giác
Có một số cảm biến xúc giác ba chiều được phát triển bằng cách sử dụng các phần tử cảm biến Piezoresistive, điện dung và tùy chọn và các cảm biến xúc giác này được chế tạo bởi Công nghệ MEMS . Các phần tử cảm biến tích hợp và các mạch tiền xử lý nhằm mục đích nhỏ gọn nhưng chúng quá yếu và dễ bị hỏng đối với hầu hết các ứng dụng và ví dụ, phạm vi lực của cảm biến xúc giác chỉ là 0,01 N w4x và các cảm biến xúc giác khác thì không. được cung cấp bởi công nghệ MEMS. Sơ đồ mạch dưới đây cho thấy một mạch cảm biến xúc giác.
Cảm biến xúc giác trong người máy
Cảm biến xúc giác được sử dụng trong robot NASA được đưa ra bên dưới
- Một trong những ví dụ liên quan trực tiếp đến việc khám phá hành tinh.
- NASA sử dụng các cảm biến này tại trạm vũ trụ quốc tế để giúp con người sửa chữa / bảo trì môi trường
- NASA đã thử nhiều cảm biến xúc giác trong robot đang ở giai đoạn đầu. Họ đã sử dụng Lực cảm biến điện trở , và bây giờ vật liệu tổng hợp đường hầm lượng tử đang được sử dụng
- Nhiều nút và ô tải được thực hiện để phát triển các cảm biến xúc giác được sản xuất bởi một robot công nghiệp
Ứng dụng cảm biến xúc giác
Chạm ứng dụng cảm biến được sử dụng trong
- Người máy
- Phần cứng máy tính
- Hệ thống an ninh
- Màn hình cảm ứng thiết bị trên điện thoại di động
- Tin học
Ưu điểm của cảm biến xúc giác
Những ưu điểm của cảm biến xúc giác được đưa ra dưới đây:
- Họ cung cấp các giải pháp cảm biến xúc giác dễ sử dụng
- Cảm biến xúc giác không có các thành phần và cáp bên ngoài
- Chiết xuất nhỏ gọn
- Công nghệ cảm nhận xúc giác đã được xác minh từ robot.
Đây là về nguyên lý hoạt động và các ứng dụng của cảm biến xúc giác. chúng tôi hy vọng rằng những thông tin đưa ra sẽ hữu ích trong việc cung cấp một số thông tin và hiểu biết tốt về dự án. Hơn nữa, nếu bạn có bất kỳ câu hỏi nào liên quan đến khái niệm này trên dự án điện và điện tử , bạn có thể bình luận trong phần bên dưới. Đây là một câu hỏi dành cho bạn - các chức năng của cảm biến xúc giác là gì?
Tín ảnh:
- Cảm biến xúc giác không gian vuông
- Cảm biến lực / mô-men xoắn transducertechniques
- Cảm biến động vernier
- Cảm biến nhiệt hình ảnh-amazon





{kind=link}
{kind=link}
{kind=link}