Bài đăng giải thích một mạch rô bốt tránh chướng ngại vật đơn giản mà không có vi điều khiển và không sử dụng các mạch hoặc IC điều khiển động cơ đặc biệt. Ý tưởng do ông Faiyyaz yêu cầu
Thiết kế
Về cơ bản, nó ở dạng phương tiện di chuyển có thể phát hiện và tránh các chướng ngại vật tiềm ẩn trên đường đi của nó và thay đổi hướng thích hợp để chuyển động của nó không bị gián đoạn, thật đơn giản!
Do đó, hoạt động là tự động mà không có bất kỳ sự can thiệp của thủ công hoặc con người.
Ý tưởng được trình bày về một robot tránh chướng ngại vật không có vi điều khiển như tên cho thấy, không sử dụng vi điều khiển và do đó, chế tạo cực kỳ đơn giản và phù hợp với bất kỳ người mới chơi nào.
Trong khi thiết kế mạch, tôi nhận ra rằng để thực hiện nguyên tắc này, cần ít nhất một vài mô-đun cảm biến chướng ngại vật, bởi vì việc sử dụng một mô-đun duy nhất có thể gây ra chuyển động thất thường của động cơ và có thể không giúp chuyển hướng hoặc quay đầu xe suôn sẻ. một con đường tự do.
Động cơ xe được thiết lập khá giống với ô tô đồ chơi điều khiển từ xa mà tôi đã thảo luận trong một trong những bài viết trước đó.
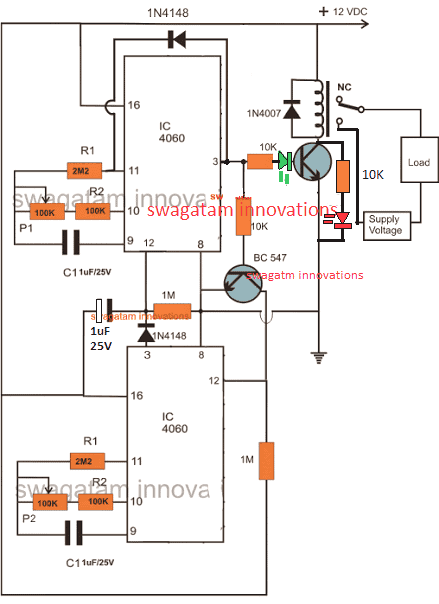
Sơ đồ sau đại diện cho một trong các mô-đun của hệ thống, và do đó cần có hai hoặc một cặp mô-đun như vậy ở bên phải và bên trái của xe.
Ý tưởng này rất đơn giản và hoạt động mà không cần vi điều khiển và không có IC điều khiển động cơ đặc biệt. Điều đó có nghĩa là bạn có thể tạo ra nó mà không cần bất kỳ loại mã hóa nào và không cần sử dụng bất kỳ loại IC điều khiển động cơ phức tạp nào ..... và mạch cho phép bạn sử dụng bất kỳ động cơ DC nào bất kể công suất của nó, vì vậy ngay cả khi xe tránh chướng ngại vật công suất cao cũng có thể được làm bằng mạch này thường được sử dụng trong các trung tâm mua sắm và các cửa hàng bán lẻ tương tự.
Sơ đồ mạch

Bây giờ chúng ta hãy cố gắng hiểu mạch trên với sự trợ giúp của lời giải thích sau:
Làm thế nào nó hoạt động
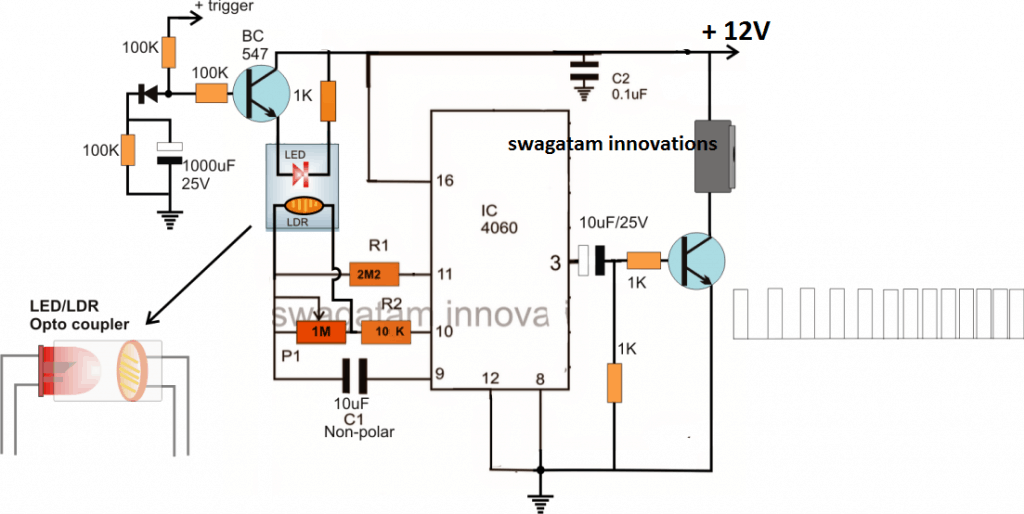
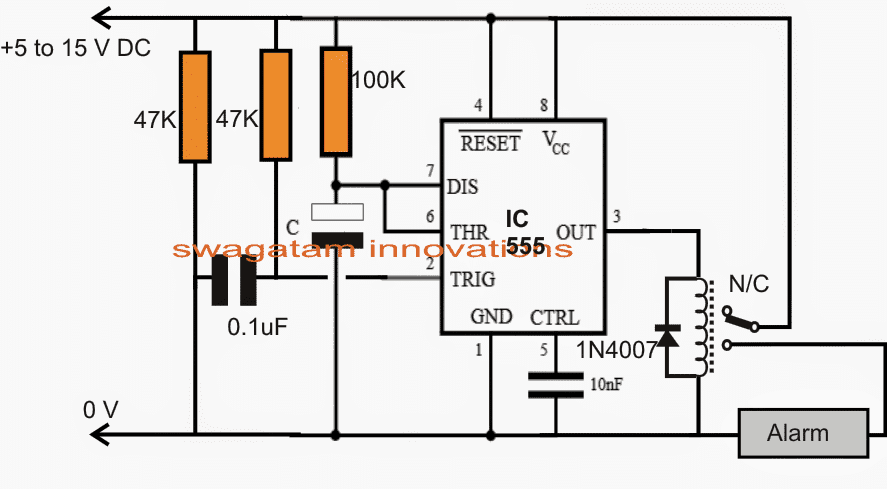
IC 555 được cấu hình như một bộ phát IR và được thiết lập để tạo ra tần số 38kHz không đổi, trong khi mạch transistorized liền kề được cấu hình làm tầng thu hoặc tầng cảm biến IR.
Hãy giả sử đó là mô-đun bên phải và giả sử mô-đun này là mô-đun đầu tiên phát hiện chướng ngại vật trên đường đi.
Do đó, ngay khi phát hiện vật cản, tần số 38kHz do IC 555 tạo ra sẽ được phản xạ về phía cảm biến của mạch thu liền kề.
Máy thu ngay lập tức kích hoạt các bóng bán dẫn liên quan để bóng bán dẫn trình điều khiển cuối cùng bị ức chế dẫn điện.
Bây giờ động cơ được điều khiển bởi bóng bán dẫn này được cho là nằm ở phía bên trái của chiếc xe, ở phía đối diện của mô-đun này ... tương tự như vậy, động cơ nằm ở phía bên phải thực sự được điều khiển bởi mô-đun bên trái .
Do đó, khi mô-đun phát hiện chướng ngại vật bên phải giả định ở trên kích hoạt, nó sẽ dừng động cơ bên trái, trong khi động cơ bên phải được phép di chuyển bình thường.
Tình huống này dẫn đến việc chiếc xe buộc phải chuyển hướng bên trái ... có nghĩa là bây giờ mô-đun bên trái giả định bắt đầu nhận được nhiều tín hiệu chướng ngại vật mạnh hơn và tiếp tục buộc xe phải tiếp tục khó khăn hơn trong quá trình chuyển hướng đang diễn ra cho đến khi nó hoàn toàn tránh được chướng ngại vật . Bây giờ mô-đun ngừng nhận tín hiệu chướng ngại vật và xe bắt đầu di chuyển bình thường về phía trước trên con đường mới của nó.
Trong khi chuyển hướng ở trên được thực hiện, mô-đun bên trái buộc phải ngày càng trở nên cô lập và tránh xa chướng ngại vật để không có cơ hội can thiệp vào quy trình, đồng thời cho phép xe chuyển hướng trơn tru và sạch sẽ.
Chính xác các quy trình tương tự được thực hiện trong trường hợp mô-đun bên trái tình cờ cảm nhận được chướng ngại vật phía trước của mô-đun bên phải, trong đó xe buộc phải di chuyển ngày càng khó khăn hơn về phía bên phải.
Chúng ta cũng có thể thấy một giai đoạn mạch 'vô hiệu hóa' trong mô-đun được kết nối với nhau qua các mô-đun bên trái và bên phải. Giai đoạn này được giới thiệu có chủ đích để đảm bảo rằng cả hai mô-đun không bao giờ được kích hoạt cùng nhau.
Do đó, ví dụ, nếu mô-đun bên trái trở thành mô-đun đầu tiên phát hiện chướng ngại vật, nó sẽ ngay lập tức tắt mô-đun bên phải và bắt đầu chuyển hướng của xe ở bên phải và ngược lại.
IC cảm biến có thể là một sê-ri TSOP17XX tiêu chuẩn
Để biết thêm thông tin liên quan đến IC cảm biến trên, bạn có thể tìm hiểu cách kết nối TSOP1738 IC
Và động cơ nên được trang bị hộp số để chuyển động ban đầu được duy trì ở mức được kiểm soát.
Thiết lập bánh xe
Có thể chứng kiến sự thiết lập hoàn chỉnh của mô-đun bên trái và bên phải và các kết nối điện liên quan trong hình bên dưới:

Cập nhật
Suy nghĩ một chút cho chúng ta biết rằng mạch robot tránh chướng ngại vật đơn giản ở trên cũng có thể được thực hiện bằng cách sử dụng một mô-đun duy nhất, thay vì cả hai.
Tuy nhiên, một mô-đun duy nhất sẽ cho phép xe thực hiện chuyển hướng một phía mỗi khi phát hiện chướng ngại vật, do đó, hệ thống có thể được cấu hình để chuyển hướng theo chiều kim đồng hồ hoặc chuyển hướng ngược chiều kim đồng hồ tùy thuộc vào động cơ được kết nối với mạch điện nào.
Ví dụ thiết lập có thể được hình dung trong hình ảnh sau:

Tuy nhiên, có vẻ như có một vấn đề với động cơ đơn ở trên được thiết lập. Nếu giả sử xe gặp một góc nghiêng bên phải bên trái. Điều này sẽ buộc xe tiếp tục di chuyển ngược chiều kim đồng hồ cho đến khi nó quay đầu xe và bắt đầu di chuyển ngược lại theo cùng hướng từ nơi nó đã xuất phát. Đây không phải là thứ mà người dùng sẽ đánh giá cao.
Trước: Điện trở SMD - Giới thiệu và Làm việc Tiếp theo: Cách hoạt động của máy đo gia tốc