Trong bài đăng này, chúng tôi điều tra các thông số kỹ thuật và chi tiết sơ đồ chân của IC L293, là một IC điều khiển quad-half-H linh hoạt và có thể được sử dụng để thực hiện nhiều động cơ thú vị mạch dựa trên trình điều khiển các ứng dụng, chẳng hạn như đối với động cơ vận hành, solenoids và các tải cảm ứng khác (4 đơn vị riêng biệt hoặc theo cặp thông qua chế độ kéo đẩy).
Làm thế nào nó hoạt động
IC L293 về cơ bản bao gồm hai cặp đầu ra có thể được sử dụng độc lập để vận hành hai tải riêng biệt ở chế độ kéo đẩy hoặc theo cách hai chiều, còn được gọi là chế độ cực totem. Ngoài ra, một số cặp đầu ra này có thể là riêng lẻ được sử dụng để vận hành 4 tải riêng lẻ theo phương thức một chiều.
Các hoạt động trên của tải được điều khiển thông qua sơ đồ chân đầu vào tương ứng, được kích hoạt từ mạch dao động bên ngoài hoặc Nguồn PWM .
Ví dụ, nếu tải được yêu cầu hoạt động theo cách cực totem, các đầu vào tương ứng của hai giai đoạn điều khiển của IC có thể được kích hoạt từ một bên ngoài bộ dao động chẳng hạn như thông qua một vài cổng NAND , trong đó một cổng có thể được nối dây như một bộ dao động trong khi cổng kia làm bộ biến tần.
Hai tín hiệu chống pha từ những Cổng NAND sau đó có thể được kết nối với các đầu vào của L293 để vận hành các đầu ra liên quan theo cách cực totem (đẩy-kéo), do đó sẽ chạy tải được kết nối theo cùng một kiểu.
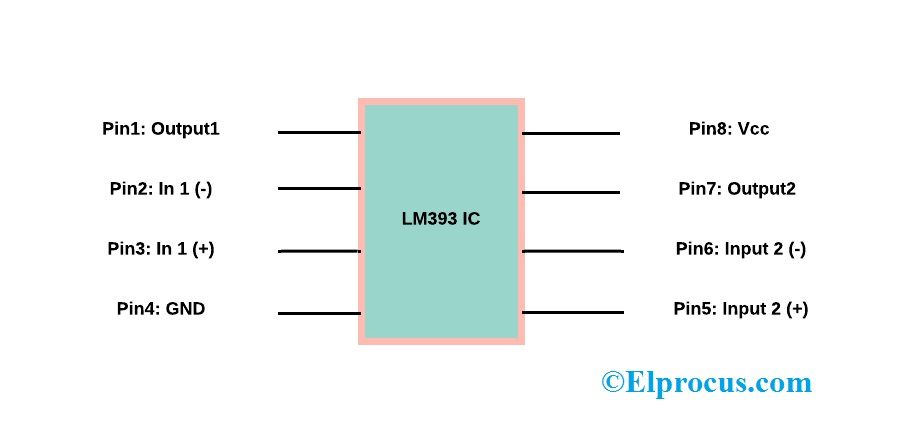
Chỉ định sơ đồ chân của IC L293
Bây giờ chúng ta hãy tìm hiểu các chức năng sơ đồ chân của IC L293 bằng cách tham khảo sơ đồ sau và từ giải thích sau:

Chân số 2 là đầu vào điều khiển, điều khiển chân đầu ra số 3.
Tương tự, chân số 7 là đầu vào điều khiển cho chân đầu ra số 6.
Pin số 1 được sử dụng để bật hoặc tắt các bộ sơ đồ chân ở trên. Cực dương ở chân số 1 giữ cho các bộ sơ đồ chân ở trên được bật và hoạt động, trong khi nguồn cung cấp âm hoặc 0V sẽ vô hiệu hóa chúng ngay lập tức.
Khá giống nhau, chân # 15 và chân # 10 trở thành đầu vào điều khiển cho đầu ra tương ứng chân # 14 và chân # 11, và những đầu ra này chỉ hoạt động miễn là chân # 9 được giữ ở mức logic dương và bị vô hiệu hóa khi mức logic 0V là áp dụng trên sơ đồ chân này.
Như đã giải thích trước đây, chân # 3 và chân # 6 có thể được sử dụng làm cặp cực totem bằng cách cấp tín hiệu logic chống pha trên chân đầu vào # 7 và chân # 2 của chúng. Có nghĩa là, khi chân số 2 đang được cấp nguồn logic tích cực, thì chân số 7 phải ở mức logic âm và ngược lại.
Điều này sẽ cho phép các đầu ra chân số 6 và chân số 3 vận hành tải được kết nối theo một hướng tương ứng và ngược lại khi các tín hiệu logic đầu vào được đảo ngược, cực tính của tải cũng bị đảo ngược và nó sẽ bắt đầu quay theo hướng ngược lại.
Nếu trình tự này được chuyển đổi nhanh chóng thì tải hoạt động tương ứng theo cách tới và lui hoặc theo cách kéo đẩy.
Thao tác trên cũng có thể được lặp lại trên cặp trình điều khiển phía bên kia.
Vcc hoặc các đầu vào tích cực nguồn cung cấp cho IC được cấu hình độc lập cho hai đầu vào nguồn cung cấp khác nhau.
Chân số 16, (Vcc1) được sử dụng để vận hành sơ đồ chân cho phép và vận hành các giai đoạn logic bên trong khác của vi mạch và chân này có thể được cung cấp đầu vào 5V, mặc dù giới hạn tối đa là 36V
Chân số 8, (Vcc2) được sử dụng đặc biệt để cấp nguồn cho động cơ và chân này có thể được cấp nguồn từ 4,5V đến 36V
Đặc điểm kỹ thuật điện của IC L293
IC L293 được thiết kế để hoạt động với bất kỳ nguồn cung cấp nào từ 4,5V đến 36V, với thông số kỹ thuật xử lý dòng điện tối đa không quá 1 amp (2 Amp ở chế độ xung, tối đa 5ms)
Do đó, bất kỳ tải nào trong các thông số kỹ thuật đã đề cập ở trên đều có thể được vận hành trên các đầu ra đã thảo luận của IC L293.
Logic điều khiển đầu vào không được vượt quá 7V, cho dù là nguồn cung cấp liên tục hay nguồn PWM.
Sử dụng IC L293 cho ứng dụng điều khiển động cơ
Bây giờ chúng ta hãy tìm hiểu cách thực hiện các mạch điều khiển động cơ sử dụng IC L293 thông qua các chế độ hoạt động khác nhau và bằng cách sử dụng tối đa 4 động cơ với cơ sở điều khiển riêng biệt.
Trong bài trước, chúng ta đã nghiên cứu chi tiết sơ đồ chân và hoạt động của IC L293, ở đây chúng ta tìm hiểu cách sử dụng cùng một IC để điều khiển động cơ thông qua các chế độ và cấu hình cụ thể.
Chế độ điều khiển
IC L293 có thể được sử dụng để điều khiển động cơ ở các chế độ sau:
1) 4 động cơ thông qua đầu vào PWM độc lập.
2) 2 Động cơ ở chế độ hai chiều hoặc cực totem với điều khiển tốc độ thông qua PWM
3) Một động cơ BLDC 2 pha sử dụng đầu vào PWM
Hình ảnh bên dưới cho thấy cách sử dụng vi mạch để điều khiển động cơ với các điều khiển độc lập và cũng như cách một động cơ đơn lẻ có thể được sử dụng để đạt được điều khiển hai chiều :

Phía bên trái của IC hiển thị một động cơ đang được cấu hình để làm việc ở chế độ hai chiều. Để đảm bảo rằng động cơ quay theo một trong các hướng đã chọn, chân số 1 và chân số 7 phải được áp dụng với đầu vào DC 5V chống pha. Để thay đổi hướng quay của động cơ, có thể thay đổi cực 5V này trên các sơ đồ chân đầu vào đã đề cập.
Chân số 1 phải được giữ ở mức logic cao để giữ cho động cơ và IC hoạt động, mức logic 0 ở đây sẽ ngay lập tức dừng động cơ.
Nguồn cung cấp tại sơ đồ chân đầu vào điều khiển có thể ở dạng PWM, điều này cũng có thể được sử dụng cho kiểm soát tốc độ của động cơ từ 0 đến tối đa chỉ đơn giản bằng cách thay đổi chu kỳ nhiệm vụ PWM.
Phía bên phải của IC mô tả một sự sắp xếp trong đó một vài động cơ được điều khiển độc lập thông qua các đầu vào PWM độc lập tại chân số 15 và chân số 10 tương ứng.
Chân số 9 phải được giữ ở mức logic cao để giữ cho động cơ và vi mạch hoạt động. Một số 0 logic tại sơ đồ chân này sẽ ngay lập tức dừng và vô hiệu hóa chức năng của các động cơ được gắn vào.
Vì phần bên trái và phần bên phải của vi mạch giống hệt với các chi tiết hoạt động của sơ đồ chân của chúng, nên sự sắp xếp được hiển thị của các động cơ có thể được hoán đổi qua các sơ đồ chân có liên quan để đạt được chức năng giống hệt nhau như đã giải thích ở trên, nghĩa là hai động cơ riêng lẻ có thể được kết nối bên trái của vi mạch chính xác như được thực hiện ở bên phải của vi mạch trong sơ đồ.
Tương tự, hệ thống hai chiều có thể được kết hợp ở phía bên phải của sơ đồ chân IC chính xác như đã đạt được ở phía bên trái của IC trong sơ đồ minh họa ở trên.
Ví dụ trên cho thấy cách sử dụng IC L293 để điều khiển 4 động cơ riêng lẻ hoặc 2 động cơ ở chế độ hai chiều và tốc độ cũng có thể được điều khiển như thế nào bằng cách sử dụng nguồn cấp PWM tại các sơ đồ đầu vào có liên quan của IC.
Sử dụng L293 để điều khiển động cơ BLDC 2 pha

Trong hình trên, chúng ta có thể thấy cách cấu hình IC L293 để điều khiển động cơ BLDC 2 pha bằng cách sử dụng sơ đồ chân được chỉ định và thông qua một vài đầu vào điều khiển được hiển thị như điều khiển A và điều khiển B.
Có thể thấy động cơ 2 pha đơn được kết nối qua các đầu ra của IC, trong khi các đầu vào được nối dây với một bộ cổng NOT chịu trách nhiệm tạo logic đầu vào chống pha cần thiết cho điều khiển động cơ.
Điểm điều khiển A và điểm điều khiển B có thể chịu logic xoay chiều để cho phép động cơ 2 pha quay chính xác.
Cực của logic xoay chiều quyết định chiều quay của động cơ.
Để đạt được điều khiển tốc độ tuyến tính trên động cơ, một dạng logic PWM có thể được thực hiện trên đầu vào điều khiển A và điều khiển B và chu kỳ làm việc của nó có thể thay đổi để đạt được điều khiển tốc độ mong muốn trên động cơ được kết nối.
Nếu bạn có thêm nghi ngờ về thông số kỹ thuật, bảng dữ liệu hoặc chi tiết sơ đồ chân của IC, bạn luôn có thể bình luận bên dưới để được trả lời ngay lập tức.
Một cặp: Nhiệt kế không dây sử dụng liên kết RF 433 MHz sử dụng Arduino Tiếp theo: Mạch ESC đa năng cho động cơ BLDC và Máy phát điện