Mạch cho phép động cơ được kết nối hoạt động theo chiều kim đồng hồ và ngược chiều kim đồng hồ thông qua các bộ kích hoạt đầu vào thay thế được gọi là mạch điều khiển hai chiều.
Thiết kế đầu tiên dưới đây thảo luận về mạch điều khiển động cơ hai chiều dựa trên Cầu đầy đủ hoặc cầu H sử dụng 4 opamps từ IC LM324. Bài thứ hai chúng ta cùng tìm hiểu về mạch điều khiển động cơ hai chiều mô men xoắn cao sử dụng IC 556
Giới thiệu
Nói chung là, công tắc cơ học quen với việc điều chỉnh chiều quay của động cơ điện một chiều. Điều chỉnh cực tính của điện áp sử dụng và động cơ quay theo hướng ngược lại!
Một mặt, điều này có thể có nhược điểm là một công tắc DPDT yêu cầu phải được thêm vào để thay đổi cực của điện áp, nhưng chúng tôi chỉ giải quyết một công tắc làm cho quy trình khá dễ dàng.
Tuy nhiên DPDT có thể có một vấn đề nghiêm trọng, bạn không nên đảo điện áp đột ngột trên động cơ DC trong quá trình chuyển động quay của nó. Điều này có thể dẫn đến hiện tượng tăng đột biến, có thể làm cháy bộ điều khiển tốc độ liên quan.
Hơn nữa, bất kỳ loại ứng suất cơ học nào cũng có thể gây ra các vấn đề tương tự. Mạch này đánh bại những biến chứng này một cách dễ dàng. Hướng và tốc độ được điều khiển với sự trợ giúp của một chiết áp duy nhất. Xoay nồi theo một hướng xác định làm cho động cơ bắt đầu quay.
Chuyển nồi theo chiều ngược lại sẽ giúp động cơ quay theo chuyển động ngược lại. Vị trí giữa trên nồi sẽ TẮT động cơ, đảm bảo rằng động cơ chạy chậm lại trước rồi dừng lại trước khi nỗ lực thay đổi hướng được thực hiện.
Thông số kỹ thuật
Vôn: Mạch và động cơ sử dụng nguồn điện chung. Điều này ngụ ý rằng vì điện áp làm việc cao nhất của LM324 là 32VDC, điều này cũng trở thành điện áp tối đa có thể sử dụng để vận hành động cơ.
Hiện hành: IRFZ44 MOSFET được thiết kế cho 49A IRF4905 sẽ có thể xử lý 74A. Tuy nhiên, các rãnh PCB chạy từ chân MOSFET đến khối đầu cuối vít chỉ có thể quản lý khoảng 5A. Điều này có thể được cải thiện bằng cách hàn các đoạn dây đồng qua các rãnh PCB.
Trong trường hợp đó, hãy đảm bảo rằng MOSFET không trở nên quá nóng - nếu có thì cần phải gắn các bộ tản nhiệt lớn hơn trên các thiết bị này.
Sơ đồ chân của LM324

ĐIỀU KHIỂN THẦU CỦA ĐỘNG CƠ DC SỬ DỤNG LM324
Về cơ bản, bạn sẽ tìm thấy 3 cách để điều chỉnh tốc độ của động cơ DC :
1. Bằng cách sử dụng các bánh răng cơ khí hóa để đạt được gia tốc lý tưởng: Phương pháp này thường hơn và cao hơn sự thuận tiện của đa số những người đam mê thực hành trong các hội thảo tại nhà.
2. Giảm điện áp động cơ qua một điện trở nối tiếp. Điều này chắc chắn có thể không hiệu quả (công suất sẽ bị tiêu tán trong điện trở) và cũng dẫn đến việc giảm mô-men xoắn.
Dòng điện được tiêu thụ bởi động cơ cũng tăng lên khi tải trên động cơ tăng lên. Dòng điện tăng lên có nghĩa là giảm điện áp nhiều hơn trên điện trở nối tiếp và do đó giảm điện áp cho động cơ.
Sau đó, động cơ cố gắng kéo lượng dòng điện cao hơn, khiến động cơ bị dừng.
3. Bằng cách áp dụng toàn bộ điện áp cung cấp cho động cơ trong các xung ngắn: Phương pháp này loại bỏ hiệu ứng giảm hàng loạt. Đây được gọi là điều chế độ rộng xung (PWM) và là chiến lược được tìm thấy trong mạch này. Xung nhanh cho phép động cơ hoạt động. Các xung kéo dài chậm cho phép động cơ chạy nhanh hơn.

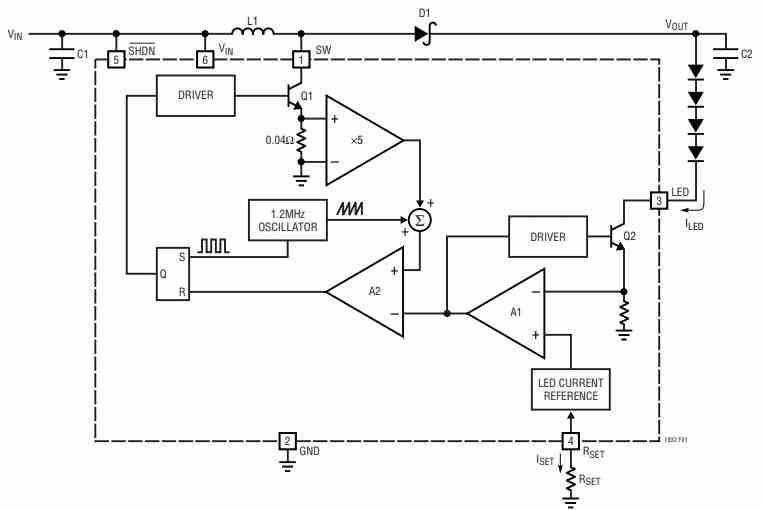
CÁCH CHỨC NĂNG CỦA NÓ (tham khảo sơ đồ)
Mạch có thể được chia thành bốn giai đoạn:
1. Điều khiển động cơ - IC1: A
2. Bộ tạo sóng tam giác - IC1: B
3. Bộ so sánh điện áp - IC1: C và D
4. Truyền động cơ - Q3-6
Hãy để chúng tôi bắt đầu với giai đoạn điều khiển động cơ, tập trung vào MOSFETs Q3-6. Chỉ một vài MOSFET này vẫn ở trạng thái kích hoạt bất kỳ lúc nào. Trong khi Q3 và Q6 đang BẬT, dòng điện di chuyển qua động cơ và làm cho nó quay theo một hướng.
Ngay sau khi Q4 và Q5 ở trong điều kiện hoạt động, dòng điện lưu thông được đảo chiều và động cơ bắt đầu quay theo hướng ngược lại. IC1: C và IC1: D xử lý MOSFET nào được bật.
Opamps IC1: C và IC1: D được nối dây như bộ so sánh điện áp. Điện áp tham chiếu cho các opamps này được tạo ra bởi bộ chia điện trở R6, R7 và R8.
Quan sát rằng điện áp tham chiếu cho IC1: D được gắn với đầu vào ‘+’ nhưng đối với IC1: C, nó được kết hợp với đầu vào ‘-‘.
Điều này có nghĩa là IC1: D được kích hoạt với điện áp cao hơn tham chiếu của nó trong khi IC1: C được nhắc với điện áp thấp hơn tham chiếu của nó. Opamp IC1: B được cấu hình như một bộ tạo sóng tam giác và cung cấp tín hiệu kích hoạt cho các bộ so sánh điện áp liên quan.
Tần số gần như là nghịch đảo của hằng số thời gian R5 và C1 - 270Hz đối với các giá trị được sử dụng.
Giảm R5 hoặc C1 tăng tần số tăng một trong hai tần số này sẽ làm giảm tần số. Mức đầu ra đỉnh-đỉnh của sóng tam giác nhỏ hơn nhiều so với sự khác biệt giữa hai tham chiếu điện áp.
Do đó, rất khó để kích hoạt cả hai bộ so sánh cùng một lúc. Hoặc nếu không thì cả 4 MOSFET sẽ bắt đầu dẫn điện, dẫn đến đoản mạch và làm hỏng tất cả chúng.
Dạng sóng tam giác được cấu trúc xung quanh điện áp bù một chiều. Tăng hoặc giảm điện áp bù thay đổi vị trí xung của sóng tam giác một cách thích hợp.
Việc chuyển sóng tam giác lên trên cho phép IC1: D so sánh kích hoạt, giảm sóng sẽ dẫn đến IC1: C so sánh kích hoạt. Khi mức điện áp của sóng tam giác ở giữa hai tham chiếu điện áp thì không có bộ so sánh nào được cảm ứng. Điện áp bù DC được điều chỉnh bởi chiết áp P1 thông qua IC1: A, được thiết kế như một bộ theo điện áp.
Điều này tạo ra nguồn điện áp trở kháng đầu ra thấp, cho phép điện áp bù DC ít bị ảnh hưởng bởi tác động tải của IC1: B.
Khi 'nồi' được chuyển mạch, điện áp bù DC bắt đầu thay đổi, lên hoặc xuống dựa trên hướng lật nồi. Diode D3 trình bày biện pháp bảo vệ phân cực ngược cho bộ điều khiển.
Điện trở R15 và tụ điện C2 là một bộ lọc thông thấp đơn giản. Điều này có nghĩa là để làm sạch mọi xung điện áp do MOSFET mang lại khi chúng BẬT nguồn cấp cho động cơ.
Danh sách các bộ phận

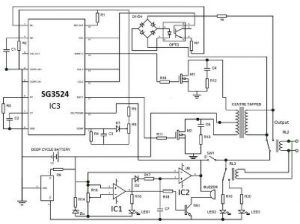
2) Điều khiển động cơ hai chiều sử dụng IC 556
Điều khiển tốc độ và hai chiều cho động cơ DC tương đối đơn giản để thực hiện. Đối với động cơ được cấp năng lượng độc lập, về nguyên tắc, tốc độ là hàm tuyến tính của điện áp cung cấp Động cơ có nam châm vĩnh cửu là một loại phụ của động cơ được cấp năng lượng độc lập và chúng thường được sử dụng trong đồ chơi và mô hình.
Trong mạch này, điện áp cung cấp cho động cơ được thay đổi bằng cách điều chế độ rộng xung (PWM), đảm bảo hiệu suất tốt cũng như mômen xoắn tương đối cao ở tốc độ động cơ thấp. Một điện áp điều khiển duy nhất ở mức 0 và +10 V cho phép đảo ngược tốc độ động cơ và thay đổi từ không đến cực đại theo cả hai hướng.
IC multivibrator linh hoạt được thiết lập như một bộ dao động 80 Hz và xác định tần số của tín hiệu PWM. Nguồn dòng T1 tích điện Ca. Điện áp răng cưa trên tụ điện này được so sánh với điện áp điều khiển trong 1C2, điện áp này xuất ra tín hiệu PWM để đệm N1-Na hoặc NPN1. Trình điều khiển động cơ dựa trên darlington là một mạch cầu có khả năng truyền tải lên đến 4 Amps, với điều kiện dòng điện chạy vào duy trì dưới 5 Amps và cung cấp đủ khả năng làm mát cho các bóng bán dẫn điện T1-Ts. Điốt D1, D5 có khả năng bảo vệ chống lại dòng điện cảm ứng từ động cơ. Công tắc S1 có thể đảo ngược hướng động cơ ngay lập tức.

Hình ảnh nguyên mẫu



Trước: Tìm hiểu về mạch khuếch đại Tiếp theo: Cách kết nối bóng bán dẫn (BJT) và MOSFET với Arduino