
Một số ưu điểm như chi phí thấp, thiết kế chắc chắn ít phức tạp và dễ bảo trì động cơ AC dẫn đến nhiều hoạt động công nghiệp được thực hiện với việc sử dụng Ổ AC hơn ổ DC. Động cơ cảm ứng xoay chiều là một loại động cơ điện đặc biệt có các đặc tính và hiệu suất tiêu biểu riêng về khởi động, điều khiển tốc độ, bảo vệ, v.v.

Động cơ cảm ứng AC
Hiệu suất trên một loạt các ứng dụng tạo ra động cơ cảm ứng ba pha chiếm 85% công suất lắp đặt của các hệ thống truyền động công nghiệp. Hãy để chúng tôi thảo luận về thông tin cơ bản về động cơ này và kỹ thuật điều khiển đặc biệt của nó SVPWM.
Động cơ cảm ứng xoay chiều ba pha
Động cơ cảm ứng xoay chiều ba pha là một máy điện quay được thiết kế để hoạt động trên nguồn điện ba pha. Động cơ 3 pha này còn được gọi là động cơ không đồng bộ. Động cơ AC này có hai loại: động cơ cảm ứng kiểu vòng sóc và vòng trượt . Nguyên lý hoạt động của động cơ này dựa trên sự sản sinh ra từ trường quay.
Cấu tạo động cơ cảm ứng 3 pha
Động cơ ba pha này bao gồm một stato và một rôto và giữa chúng không tồn tại kết nối điện. Các stato và rôto này được chế tạo bằng cách sử dụng vật liệu lõi có từ tính cao để giảm độ trễ và tổn thất dòng điện xoáy.

Cấu tạo động cơ cảm ứng 3 pha
Khung Stato có thể được xây dựng bằng gang, nhôm, hoặc thép cuộn. Khung stato cung cấp bảo vệ cơ học cần thiết và hỗ trợ cho lõi nhiều lớp của stato, các cuộn dây và các bố trí khác để thông gió. Stato được nối với các cuộn dây ba pha được đặt chồng lên nhau ở sự lệch pha 120 độ được lắp thành các lớp có rãnh. Sáu đầu của ba cuộn dây được đưa ra và nối với hộp đấu dây để các cuộn dây này được kích thích bởi nguồn điện chính ba pha.
Các cuộn dây này bằng dây đồng được cách điện bằng vecni được lắp vào các lớp có rãnh cách điện. Ở mọi nhiệt độ làm việc, vecni tẩm này vẫn cứng. Các cuộn dây này có điện trở cách điện cao và khả năng chống chịu cao đối với môi trường mặn, hơi ẩm, khói kiềm, dầu và mỡ, v.v. Tùy theo mức điện áp, các cuộn dây này được kết nối ở một trong hai kết nối sao hoặc đồng bằng .

Động cơ cảm ứng lồng sóc
Rôto của động cơ cảm ứng xoay chiều ba pha là khác nhau đối với động cơ cảm ứng kiểu vành trượt và lồng sóc. Rôto ở kiểu vòng trượt bao gồm các thanh nhôm hoặc đồng nặng bị chập ở cả hai đầu của rôto hình trụ. Trục của động cơ cảm ứng được đỡ trên hai ổ trục ở mỗi đầu để đảm bảo quay tự do trong stato và giảm ma sát. Nó bao gồm một chồng các thanh thép cách đều nhau, được đục lỗ xung quanh chu vi của nó, trong đó đặt các thanh nhôm hoặc đồng nặng không cách nhiệt.
Rôto kiểu vành trượt bao gồm các cuộn dây ba pha được đấu bên trong ở một đầu, các đầu còn lại đưa ra bên ngoài và nối với các vành trượt lắp trên trục rôto. Và để phát triển mô-men xoắn khởi động cao, các cuộn dây này được kết nối với bộ lưu biến với sự trợ giúp của chổi than. Điện trở bên ngoài hoặc bộ lưu biến này chỉ được sử dụng ở giai đoạn bắt đầu. Khi động cơ đạt được tốc độ bình thường, chổi than bị ngắn mạch và rôto dây quấn hoạt động như rôto lồng sóc.
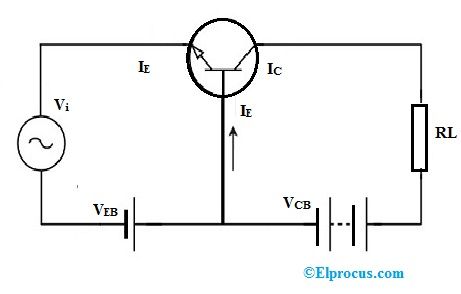
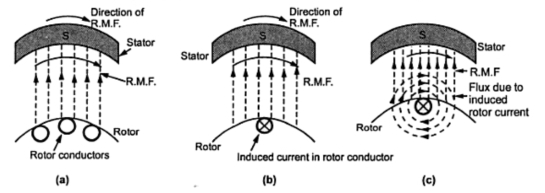
Nguyên lý hoạt động của động cơ cảm ứng 3 pha

Nguyên lý hoạt động của động cơ cảm ứng 3 pha
- Khi động cơ được kích thích với nguồn điện ba pha, cuộn dây stato ba pha tạo ra từ trường quay 120 độ dịch chuyển có độ lớn không đổi và quay với tốc độ đồng bộ. Từ trường thay đổi này cắt các dây dẫn của rôto và tạo ra dòng điện trong chúng theo nguyên tắc của định luật Faraday về cảm ứng điện từ. Khi các dây dẫn rôto này bị ngắn mạch, dòng điện bắt đầu chạy qua các dây dẫn này.
- Khi có từ trường của stato, các dây dẫn của rôto được đặt, và do đó, theo nguyên lý lực Lorenz, một lực cơ học tác dụng lên dây dẫn rôto. Do đó, tất cả các lực của dây dẫn rôto, tức là tổng các lực cơ học tạo ra mômen quay trong rôto có xu hướng chuyển động nó theo cùng hướng của từ trường quay.
- Sự quay của dây dẫn rôto này cũng có thể được giải thích bằng định luật Lenz cho biết rằng dòng điện cảm ứng trong rôto phản đối nguyên nhân tạo ra nó, ở đây sự đối lập này là từ trường quay. Kết quả này là rôto bắt đầu quay theo cùng chiều của từ trường quay stato. Nếu tốc độ rôto lớn hơn tốc độ stato thì không có dòng điện nào tạo ra trong rôto vì lý do quay rôto là tốc độ tương đối của từ trường rôto và stato. Sự chênh lệch trường stato và rôto này được gọi là độ trượt. Đây là cách gọi động cơ 3 pha là máy điện không đồng bộ do sự chênh lệch tốc độ tương đối giữa stato và rôto.
- Như chúng ta đã thảo luận ở trên, tốc độ tương đối giữa trường stato và các dây dẫn của rôto làm quay rôto theo một hướng cụ thể. Do đó, để tạo ra chuyển động quay, tốc độ rôto Nr phải luôn nhỏ hơn tốc độ trường stato Ns và sự khác biệt giữa hai thông số này phụ thuộc vào tải trên động cơ.
Sự khác biệt của tốc độ hoặc độ trượt của động cơ cảm ứng xoay chiều được cho là

- Khi stato đứng yên, Nr = 0 nên độ trượt trở thành 1 hoặc 100%.
- Khi Nr ở tốc độ đồng bộ, độ trượt bằng không nên động cơ không bao giờ chạy ở tốc độ đồng bộ.
- Độ trượt của động cơ cảm ứng 3 pha từ không tải đến đầy tải là khoảng 0,1% đến 3%, đó là lý do tại sao động cơ cảm ứng được gọi là động cơ tốc độ không đổi.
Điều khiển SVPWM của động cơ cảm ứng 3 pha
Thông thường nhất để điều khiển động cơ cảm ứng, các bộ truyền động dựa trên biến tần PWM được sử dụng. So với các ổ đĩa tần số cố định, Kiểm soát lặn PWM cả độ lớn của điện áp và tần số của dòng điện cũng như điện áp đặt vào động cơ cảm ứng. Bằng cách thay đổi các tín hiệu PWM được áp dụng cho các cổng công tắc nguồn, lượng điện được cung cấp bởi các bộ truyền động này cũng khác nhau để đạt được điều khiển tốc độ động cơ cảm ứng ba pha.

Điều khiển SVPWM của động cơ cảm ứng 3 pha bởi Edgefxkits.com
Một số sơ đồ điều chế độ rộng xung (PWM) được sử dụng để điều khiển truyền động động cơ ba pha. Nhưng hầu hết các Sine PWM (SPWM) và PWM vector không gian (SVPWM) được sử dụng rộng rãi. So với SPWM, điều khiển SVPWM cung cấp mức điện áp cơ bản cao hơn và giảm hàm lượng sóng hài. Ở đây chúng tôi đã đưa ra một triển khai thực tế của điều khiển SVPWM này bằng cách sử dụng 8051 vi điều khiển .
Trong mạch dưới đây, bộ nghịch lưu điện áp ba mức được sử dụng để có được ba điện áp đầu ra phụ thuộc vào điện áp bus DC. Nguồn cung cấp một pha được chỉnh lưu để cung cấp nguồn DC cho cả mạch vi điều khiển và mạch nghịch lưu. 8051 Vi điều khiển được lập trình để tạo ra tín hiệu SVPWM được cấp cho IC điều khiển cổng.

Sơ đồ khối của điều khiển SVPWM của động cơ cảm ứng 3 pha của Edgefxkits.com
Mạch biến tần bao gồm sáu MOSFET để tạo ra nguồn cung cấp ba pha thay đổi, đối với mỗi pha, hai MOSFET được triển khai. Các cổng MOSFET này được kết nối với IC điều khiển cổng. Khi nhận được tín hiệu PWM từ công tắc trình điều khiển cổng vi điều khiển MOSFETs để tạo ra điện áp đầu ra AC thay đổi được. Do đó, biến điện xoay chiều này với sự thay đổi điện áp và tần số thay đổi tốc độ của động cơ .
Đây là thông tin cơ bản về động cơ điện cảm ứng xoay chiều có cấu tạo và nguyên lý làm việc. Ngoài ra, kỹ thuật SVPWM điều khiển tốc độ của động cơ có nhiều ưu điểm hơn các kỹ thuật PWM khác như chúng ta đã thấy ở trên. Nếu bạn nghi ngờ về bộ vi điều khiển lập trình để thực hiện kỹ thuật SVPWM trong đó, bạn có thể liên hệ với chúng tôi bằng cách bình luận bên dưới.
Tín ảnh:
- Động cơ cảm ứng AC của wikimedia
- Cấu tạo động cơ cảm ứng 3 pha bởi thiết kế điện tử
- Động cơ cảm ứng vòng trượt và lồng sóc của tpub
- Nguyên lý hoạt động của động cơ cảm ứng 3 pha bằng blogspot








{kind=link}
{kind=link}
{kind=link}