Trong bài đăng này, chúng tôi tìm hiểu động cơ BLDC là gì và sau đó chúng tôi tìm hiểu về thiết kế của mạch điều khiển động cơ BLDC không cảm biến.
Quạt CPU BLDC
Bạn có nhìn thấy những chiếc quạt chuyển động nhanh đó trong CPU, bộ ổn định điện áp, đầu DVD và các thiết bị tương tự khác, những thiết bị hoạt động với hiệu suất cao nhất, tiêu thụ không gian, dòng điện tối thiểu và vẫn có thể cung cấp các hoạt động quan trọng như quy định cho thiết bị cụ thể?
Vâng, đây là tất cả các phiên bản hiện đại của quạt BLDC hoặc động cơ DC không chổi than, vượt trội hơn nhiều so với động cơ chổi than truyền thống cũ.

Hình ảnh lịch sự: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Tuy nhiên, một động cơ BLDC sẽ yêu cầu một mạch trình điều khiển phức tạp và vâng, tất cả các quạt CPU này đều chứa các mô-đun trình điều khiển này được tích hợp sẵn, mặc dù chúng có thể dễ dàng hoạt động bằng cách sử dụng DC thông thường, bên trong hệ thống đã được trang bị một mạch thông minh.
Trình điều khiển động cơ BLDC
Ở đây chúng ta sẽ tìm hiểu về một mạch điều khiển động cơ BLDC thông minh như vậy, sử dụng một chip duy nhất DRV10963 để điều khiển bất kỳ động cơ BLDC nhỏ nào với hiệu suất đáng kinh ngạc và ở phần sau của một trong các bài viết sắp tới, chúng ta sẽ xem cách mạch IC này có thể được nâng cấp để lái xe ngay cả BLDC dòng cao mạnh mẽ chẳng hạn như BLDC được sử dụng trong quadcopters.
Nhưng trước khi điều này, sẽ rất thú vị khi tìm hiểu một chút về động cơ BLDC.
Sự khác biệt giữa động cơ DC có chổi than và không chổi than
Sự khác biệt giữa động cơ có chổi than và động cơ không chổi than và tỷ lệ hiệu quả là khá rõ ràng.
Vì động cơ có chổi than có phần ứng quấn tự di chuyển giữa các nam châm, nên phải sử dụng 'chổi' (tiếp điểm cọ xát) để các đầu cuối cuộn dây chuyển động có thể nhận điện áp cung cấp một cách nhất quán mà không cần phải tự tiếp cận nguồn cung cấp, điều này sẽ làm cho làm việc không thể và gây nguy hiểm cho các hoạt động.
Trong động cơ không chổi than, cuộn dây hoặc cuộn dây không bao giờ chuyển động và không đổi, ở đây rôto mang một bộ nam châm vĩnh cửu và quay trong ảnh hưởng của từ thông xung quanh cuộn dây.
Vì nam châm không có mọi thứ phức tạp và có thể hoạt động mà không cần đến các thiết bị đầu cuối để quản lý hoặc nhận điện, nó có thể hoạt động dễ dàng, quay với tốc độ nhanh và hầu như ở mức độ không ồn ào.
Nhưng có một điểm khó khăn ở đây. Để làm cho một nam châm điện phản ứng với từ thông của nam châm vĩnh cửu, cần phải có sự thay đổi liên tục của pha hoặc các cực từ, để hai đối trọng có thể liên tục phản ứng và truyền qua một lực ngược nhau, do đó giải phóng lực xoắn cần thiết trên rôto và thực hiện chuyển động quay với mômen kết quả.
Trong động cơ có chổi than, điều này trở nên dễ dàng hơn do bản chất tự điều chỉnh của cuộn dây phần ứng có thể quay và tạo ra lực từ trường ngược chiều tự duy trì và tiếp tục quay mà không cần bất kỳ xung hoặc xử lý bên ngoài nào.
Tuy nhiên trong BLDC, điều này trở thành một vấn đề vì rôto nam châm vẫn 'không biết gì' và yêu cầu lệnh từ tính được tính toán từ cuộn dây để quay theo cách có ý nghĩa và không theo cách lộn xộn.
Đó chính xác là lý do tại sao tất cả các động cơ BLDC bắt buộc phải có mạch điều khiển động cơ để chỉ huy ba bộ cuộn dây riêng biệt bên trong động cơ.
Do đó, tất cả BLDC về cơ bản là động cơ 3 pha và bắt buộc phải có 3 pha để tạo ra mômen quay trên rôto.
Trình điều khiển BLDC không cảm biến làm gì
Mạch điều khiển BLDC ít cảm biến chỉ đơn giản là điện cho 3 bộ cuộn dây theo cách tuần tự sao cho rôto từ tính có thể đi qua một lực ngược chiều nhất quán cho phép động cơ đạt được mô-men xoắn và lực quay duy trì.
Nhưng nguồn điện tuần tự này của cuộn BLDC bởi mạch không thể chỉ được đặt ngẫu nhiên, nó phải song song hoặc đáp ứng với vị trí quay của nam châm rôto, nếu không quá trình thực hiện có thể bị hỏng và chúng ta có thể chứng kiến trục động cơ (rôto ) quay một cách lộn xộn, bị giật giữa chiều kim đồng hồ và ngược chiều kim đồng hồ mà không có chuyển động quay hợp lý.
Tại sao cảm biến được sử dụng trong động cơ BLDC
Do đó, chúng tôi giới thiệu các cảm biến được định vị bên trong nhiều biến thể động cơ BLDC, các cảm biến này (điển hình là cảm biến hiệu ứng Hall) 'hiểu' vị trí thay đổi của các cực từ của nam châm rôto, chỉ thị cho mạch bộ xử lý đi kèm để nhiễm điện cho cuộn dây tương ứng và thực hiện chuyển động quay với một mô-men xoắn tối ưu.
Cảm biến hiệu ứng Hall được sử dụng hiệu quả trong hầu hết các động cơ BLDC có kích thước tương đối lớn hơn, nhưng đối với động cơ nhỏ hơn như trong quạt CPU, ổ đĩa CPU, đầu DVD, trong quạt hút nhỏ, đối với động cơ được sử dụng trong quadcopters, cảm biến hiệu ứng Hall có thể trở nên không phù hợp và do đó, một phương pháp tiếp cận ít cảm biến hơn được thực hiện.
Điều này liên quan đến việc khai thác điện EMF phía sau vốn có của cuộn dây được lấy làm nguồn tham chiếu để xử lý và cấp điện cho các bộ cuộn dây có liên quan và thực hiện mômen quay.

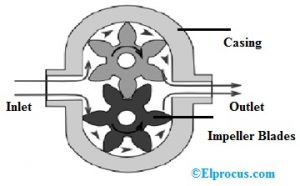
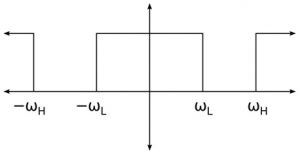
Mô phỏng chuyển động của rôto BLDC
Trong mô phỏng thô ở trên, chúng ta có thể hình dung cách EMF phía sau được giải phóng được lấy làm tham chiếu và được sử dụng để tạo ra các xung tuần tự cho các bộ cuộn dây tiếp theo, đặt mômen quay lên rôto nam châm vĩnh cửu trung tâm. Mô phỏng có thể không phải là bản sao chính xác, tuy nhiên nó cho ta một ý tưởng sơ lược về nguyên lý hoạt động.
Điều thú vị là xung được chuyển mạch khi N / S của nam châm nằm chính xác ở tâm của lõi cuộn dây, điều này cho phép cuộn dây cung cấp năng lượng là N hoặc S tùy thuộc vào cực xung và tạo ra lực hút và đẩy. lực lên các nam châm N / S, do đó tạo ra mô-men xoắn cần thiết ở mức tối đa có thể.
Và điều này lần lượt trở thành có thể do EMF phía sau được giải phóng thông qua việc chuyển đổi cuộn dây trước đó.
Phần thảo luận ở trên làm rõ hoạt động của động cơ BLDC ít cảm biến, bây giờ chúng ta hãy tìm hiểu cách một mạch được chỉ định xử lý việc thực hiện phức tạp ở trên của chuyển mạch 3 pha
Trình điều khiển BLDC DRV10963
Sau một số Googling, tôi đã tìm thấy mạch trình điều khiển BLDC không cảm biến này sử dụng một chip duy nhất DRV10963 sử dụng số lượng bộ phận không đáng kể trong cấu hình và vẫn có thể thực hiện một quá trình xử lý tinh vi cho các hành động dự định.
DRV10963 là một chip hiện đại được thiết kế đặc biệt để vận hành động cơ BLDC ít cảm biến hơn bằng cách chỉ dự đoán EMF phía sau từ cuộn dây động cơ và đưa ra lệnh chính xác trên cuộn dây và đạt được mô-men quay tối ưu trên rôto.
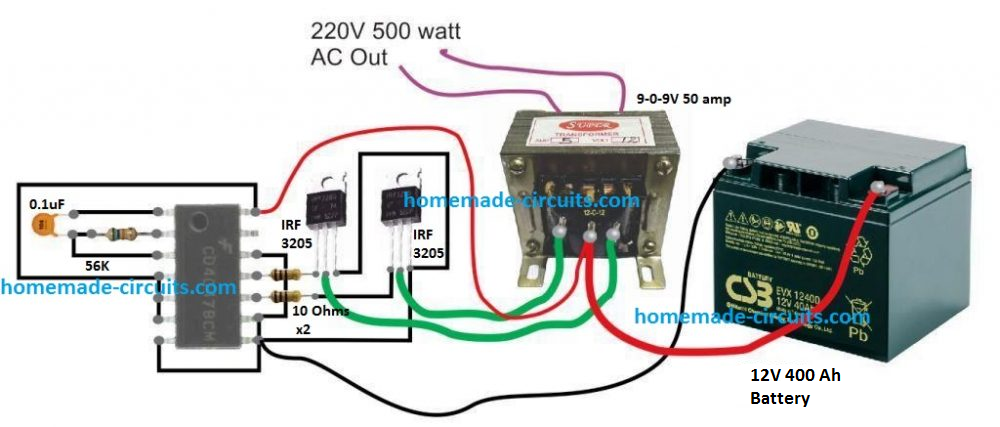
Sơ đồ mạch

Hình ảnh trên cho thấy bố trí đơn giản của mạch dường như không bao gồm gì ngoài bản thân vi mạch.
Các sơ đồ chân khác nhau được phân bổ để thực hiện các chức năng cụ thể như điều khiển tốc độ PWM của động cơ, điều khiển hướng, v.v. bằng cách chỉ cần cung cấp các sơ đồ chân có liên quan với các dữ liệu được chỉ định từ nguồn bên ngoài.
Hình ảnh sau đây cho thấy gói của chip, trông giống như một IC DIL 10 chân, các chức năng sơ đồ chân khác nhau của cùng một loại có thể được nghiên cứu từ dữ liệu như được cung cấp dưới sơ đồ:

Tham khảo sơ đồ mạch của mạch điều khiển BLDC không cảm biến được đề xuất như đã trình bày trong bài viết trước và cả hình ảnh con chip ở trên, chi tiết sơ đồ chân có thể được hiểu như sau:
Chi tiết sơ đồ IC
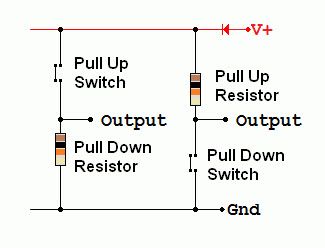
FG = Nó là chân chỉ báo tốc độ động cơ (đầu ra), được lắp ở chế độ cực thu mở với BJT bên trong.
Bộ thu mở biểu thị rằng đầu ra tại sơ đồ chân này sẽ tạo ra PWM âm thông qua lôgic chìm trên bộ thu hở và mặt đất, do đó để có được kết quả đọc hợp lệ, người dùng sẽ cần kết nối một điện trở kéo lên qua bộ thu mở này và nguồn cung cấp dương (5V ) để đạt được chỉ báo tốc độ tại sơ đồ chân này.
FGS = Đây là đầu vào của bộ chọn chỉ báo tốc độ, có nghĩa là mức logic cao hoặc thấp có thể được giới thiệu ở đây để BẬT / TẮT chân chỉ báo FG.
Vcc = Nguồn cung cấp dương cho IC để cho phép nó hoạt động, không được vượt quá 5V.
W, U và V là đầu ra 3 pha cho động cơ BLDC được cho là hoạt động thông qua IC này. Điều này cũng hoạt động giống như đầu vào để cảm nhận xung EMF của động cơ để chuyển đổi đồng bộ cần thiết của các cuộn dây động cơ.
GND = Đề cập đến sơ đồ chân cung cấp âm của IC đối với chân Vdd.
FR = Giúp chọn hoặc ra lệnh cho hướng của động cơ và có thể được thay đổi động bất cứ lúc nào khi hệ thống được cấp nguồn, đơn giản bằng cách đưa vào logic bên ngoài cao hoặc logic thấp.
PWM = Nó biểu thị đầu vào điều khiển PWM từ một bộ tạo dạng sóng PWM bên ngoài.
Đầu vào PWM này có thể thay đổi để thực hiện điều khiển tốc độ mong muốn của động cơ BLDC được kết nối.
Khoảng trống ở giữa chip cho biết tấm tản nhiệt, có thể được kẹp hoặc ép bằng một bộ tản nhiệt để tản nhiệt có thể sinh ra trên chip khi nó được sử dụng với động cơ BLDC có tải.
Phần thảo luận ở trên nêu rõ sơ đồ chân hoặc chi tiết kết nối của chip điều khiển động cơ BLDC không cảm biến DRV10963, bây giờ chúng ta hãy phân tích chi tiết cấu hình bên trong và hoạt động của chip với sự trợ giúp của các điểm sau:
Mô tả thiết bị
DRV10963 là bộ điều khiển động cơ điện 3 pha không có cảm biến với MOSFETs nguồn tích hợp (3 pha H cầu nối). Nó được điều chỉnh để có năng suất cao hơn, giảm tiếng ồn và giảm thiểu các chức năng dẫn động động cơ đếm vật liệu thứ cấp. Sơ đồ quản lý hình sin 180 ° không cửa sổ không cảm biến độc quyền mang lại hiệu quả đi lại của động cơ không gây tiếng ồn.
DRV10963 được tạo thành từ chức năng phát hiện khóa thông minh, kết hợp với các mạch bảo mật bổ sung tích hợp để đạt được hiệu suất an toàn. DRV10963 có thể được tìm thấy trong một bao bì USON 10 chân hiệu quả nhiệt với một tấm tản nhiệt không có mái che.
Cách thức hoạt động của vi mạch
Sản phẩm DRV10963 là bộ điều khiển động cơ không có cảm biến 3 pha với MOSFETs nguồn điện truyền, Nó là
được tạo ra đặc biệt cho hiệu suất vượt trội, giảm cộng hưởng và tối thiểu các chức năng truyền động động cơ đếm bộ phận bề mặt.
Phương án điều khiển hình sin 180 ° không có cửa sổ không có cảm biến chính trình bày động cơ hoạt động không ồn ào bằng cách duy trì danh nghĩa gợn sóng kích thích bằng điện. Khi khởi động, thiết bị DRV10963 sẽ quay động cơ theo quy trình được chỉ định thông qua chân đầu vào FR.
Chip DRV10963 sẽ hoạt động động cơ BLDC 3 pha sử dụng kế hoạch điều khiển hình sin.
Ý nghĩa của điện áp pha hình sin được sử dụng phụ thuộc vào chu kỳ làm việc của chân PWM. Trong khi động cơ di chuyển, IC DRV10963 cung cấp dữ liệu vận tốc tại chân FG.
Thiết bị DRV10963 có khả năng cảm biến khóa thông minh. Trong trường hợp như vậy, trong đó động cơ bị ngừng do áp suất bên ngoài, chương trình sẽ xác định vấn đề khóa và sẽ thực hiện các biện pháp để tự bảo vệ cùng với động cơ.
Quy trình cụ thể của mạch cảm biến khóa được mô tả chi tiết trong Phát hiện khóa. Ngoài ra, IC DRV10963 còn bao gồm nhiều mạch an toàn tích hợp, chẳng hạn như bảo vệ quá dòng, bảo vệ quá áp, bảo vệ dưới điện áp và bảo vệ quá nhiệt.
Giải thích Đặc điểm
Nhập và kiểm soát tốc độ
DRV10963 trình bày các đầu ra PWM 3 pha 25 kl-lz có thể có tỷ lệ phần trăm chuẩn của dạng sóng hình sin từ pha này sang pha khác. Trong trường hợp bất kỳ chu kỳ nào được xác định liên quan đến mặt đất, dạng sóng được phát hiện có khả năng là một hình sin được bảo vệ PWM kết hợp với các sóng hài bậc 3 như thể hiện trong Hình 2.

Chiến lược mã hóa này hợp lý hóa các thông số kỹ thuật của trình điều khiển vì lý do rằng có thể sẽ có một đầu ra một pha có thể ngang bằng với 0.
Biên độ kết quả thay đổi theo điện áp cung cấp (VCC) và chu kỳ nhiệm vụ PWM bắt buộc (PWM) như được xác định trong Công thức 1 và được đánh dấu trong Hình 3. Biên độ tối ưu được thực hiện khi chu kỳ nhiệm vụ PWM được hướng dẫn là 100 PERCENT.
Vphpk = PWMdc>

Tốc độ động cơ được điều chỉnh không trực tiếp thông qua việc sử dụng lệnh PWM để điều chỉnh biên độ của điện áp pha xảy ra được sử dụng cho động cơ.
Chu kỳ nhiệm vụ của đầu vào PWM được sửa đổi thành số lượng kỹ thuật số 9 bit (từ 0 đến 511).
Độ phân giải quy định là 1/512 == 0,2%. Bộ phân tích chu kỳ nhiệm vụ tạo điều kiện cho hoạt động trao đổi thứ tự ban đầu giữa chu kỳ nhiệm vụ đầu vào và hình số 9 bit.
Điều này được đánh dấu trong Hình 4, trong đó r = 80 ms.

Hiệu suất trao đổi giữa chu kỳ nhiệm vụ theo thứ tự PWM cùng với biên độ tối đa đầu ra có thể thay đổi trong thiết bị DRV10963.
Biên độ tối đa kết quả được thảo luận trong Phương trình 1 khi lệnh PWM> chu kỳ nhiệm vụ hoạt động tối thiểu. Chu kỳ nhiệm vụ hoạt động thấp nhất thường được thiết lập có thể là 13%, 10%, 5% hoặc không hạn chế bởi cài đặt OTP (MINOP_DC1: 0).
Bảng 1 trình bày các cấu hình được khuyến nghị cho chu kỳ hoạt động tối thiểu.
Bất cứ khi nào chu kỳ nhiệm vụ được hướng dẫn PWM nhỏ hơn chu kỳ nhiệm vụ hoạt động thấp nhất và hơn 1,5%, đầu ra sẽ được điều chỉnh ở chu kỳ nhiệm vụ hoạt động tối thiểu. Bất kỳ lúc nào chu kỳ nhiệm vụ đầu vào dưới 1,5%, thiết bị DRV10963 có thể sẽ không chạy đầu ra và được chuyển sang chế độ chờ.
Điều này có thể được minh họa trong Hình 6.

Cấu hình xoay
DRV10963 sẽ khởi động động cơ bằng một kỹ thuật được chi tiết hóa trong Hình 7.

Đồ thị khởi tạo động cơ bao gồm các lựa chọn thay thế có thể cấu hình thiết bị cho vòng lặp mở đến giới hạn chuyển đổi vòng lặp đóng (HOW.), Căn chỉnh thời gian (TAHQH) và tốc độ tăng tốc (RACE).
Để sắp xếp rôto theo logic giao hoán, DRV10963 thực hiện chu kỳ nhiệm vụ x% trên các pha V và W đồng thời điều khiển pha U tại GND.
Kịch bản này duy trì trong vài giây TAIign. Mức ý nghĩa x% được xác định bởi điện áp VCC (như trong Bảng 2) để duy trì mômen quay phong phú trên nhiều điện áp nguồn khác nhau.
Khi trình tự căn chỉnh hoàn thành, động cơ buộc phải tăng tốc bằng cách đặt điện áp pha hình sin với các mức đỉnh như được minh họa trong Bảng 2 và tăng tốc bằng phạm vi giao hoán ở tốc độ mở rộng được đại diện bởi RACE cho đến khi mức giao hoán tăng đến Hom ., Hz.
Ngay sau khi đạt đến giới hạn này, DRV‘l0963 sẽ chuyển đổi sang chế độ vòng kín, theo đó tiến trình truyền động chuyển mạch được công nhận bởi thuật toán điều khiển tích hợp trong khi điện áp sử dụng được xác định bởi đầu vào chu kỳ nhiệm vụ bắt buộc PWM.
Có thể định cấu hình vòng lặp mở đến giới hạn chuyển đổi vòng lặp đóng (Hom), căn chỉnh thời gian (TAHQH) và tốc độ tăng tốc (RACE) thông qua cấu hình OTP.
Việc lựa chọn ngưỡng phân phối (HOW,) thường được phê duyệt bằng đánh giá thử và sai. Mục tiêu là thích một dung sai chuyển giao có thể càng ít càng tốt và cho phép động cơ chuyển đổi dễ dàng và trung thực giữa gia tốc vòng hở và gia tốc vòng kín.
Các động cơ tốc độ cao thường được tăng lên (tốc độ tối đa) đòi hỏi khả năng chịu tải vượt trội do thực tế động cơ tốc độ cao bao gồm giảm Kt do đó giá cả phải chăng hơn BEMF.
Bảng 3 trình bày các ưu tiên có thể cấu hình đối với dung sai chuyển giao. Tốc độ cao nhất tính bằng Hz điện được chứng minh là một tham chiếu để giúp chọn tốc độ chuyển giao mong muốn cho một bài gửi cụ thể.

Việc lựa chọn thời gian căn chỉnh (TAHQH) và tốc độ tăng tốc (RACE) thậm chí có thể phụ thuộc vào việc kiểm tra thử và sai.
Động cơ có quán tính lớn hơn thường yêu cầu thời gian căn chỉnh kéo dài và tốc độ tăng tốc chậm hơn, ngược lại với động cơ có quán tính thấp thường yêu cầu thời gian căn chỉnh ngắn hơn cùng với tỷ lệ phần trăm gia tốc nhanh hơn. Sự cân bằng của chương trình cần được thực hiện để tận dụng sự ổn định khi ra mắt thay vì kéo dài thời gian.
TI xác nhận bắt đầu bằng việc quyết định các cấu hình ít cường độ hơn (RACE chậm hơn và Tmign đáng kể) để thỏa hiệp thời gian tăng mô-men xoắn để hỗ trợ tỷ lệ thực hiện tối đa.
Ngay sau khi thiết bị được xác nhận là hoạt động một cách tận tâm, các cấu hình mạnh mẽ hơn (RACC lớn hơn và TAHQH thấp hơn) có thể được sử dụng để giảm thời gian bật lên và đồng thời theo dõi thận trọng tỷ lệ hoàn thành.
Bảng 4 trình bày các cài đặt có thể định cấu hình cho TA'g ,, và RACE.

Phần còn lại của giải thích liên quan đến IC BLDC không cảm biến này được trang bị trong biểu dữ liệu gốc này
Vui lòng bình luận để biết thêm về chi tiết mạch điều khiển động cơ BLDC không cảm biến đã thảo luận ở trên
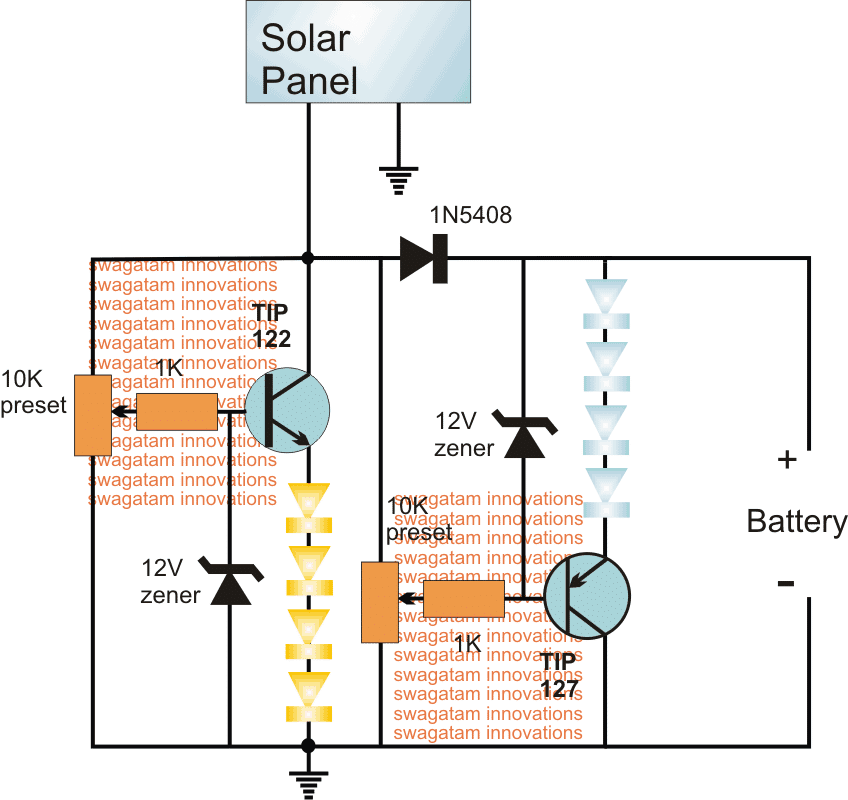
Một cặp: Mạch cung cấp điện ba lô LED 12V Tiếp theo: Mạch điều khiển từ xa Quadcopter không có MCU