Bài đăng giải thích một mạch khởi động, dừng máy bơm chìm tự động với bảo vệ chạy khô để thực hiện chuyển đổi BẬT / TẮT tự động của động cơ theo mức nước cao / thấp của bể chứa trên cao.
Khái niệm mạch
Trong một trong những bài viết trước, chúng tôi đã học một khái niệm tương tự, khái niệm này cũng xử lý một chức năng tự động khởi động / dừng của nút công tắc tơ bơm chìm , tuy nhiên kể từ đây, các cảm biến liên quan đến công tắc phao , thiết kế trông hơi phức tạp và không phù hợp với tất cả mọi người.
Hơn nữa, bảo vệ chạy khô có trong thiết kế dựa trên sự thay đổi nhiệt độ của động cơ để thực hiện bảo vệ động cơ cần thiết. Tính năng này cũng không quá mong muốn đối với người dân vì việc lắp đặt cảm biến nhiệt qua động cơ ngầm không dễ dàng.
Trong bài đăng này, tôi đã cố gắng loại bỏ tất cả những phức tạp này và thiết kế một mạch có tính năng cảm nhận sự hiện diện của nước chỉ thông qua các cảm biến kim loại được nhúng trong các nguồn nước liên quan.
Hoạt động mạch
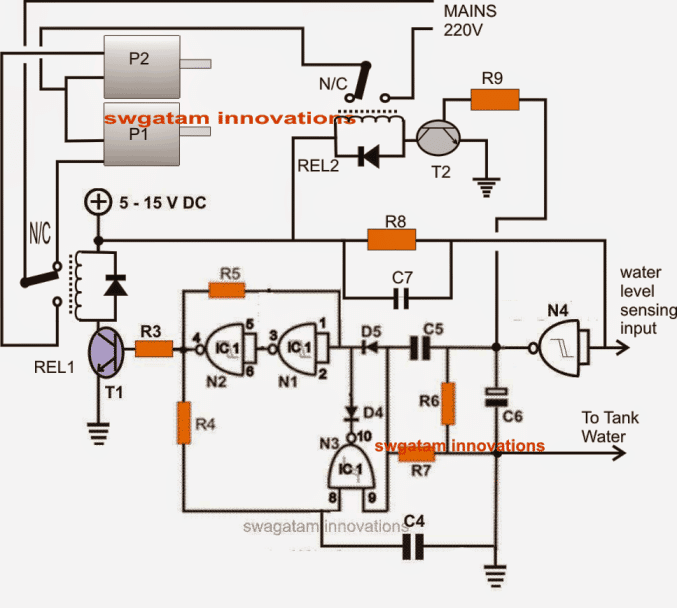
Chúng ta hãy hiểu đề xuất Khởi động, ngắt mạch tự động của máy bơm chìm có bảo vệ chạy khô.

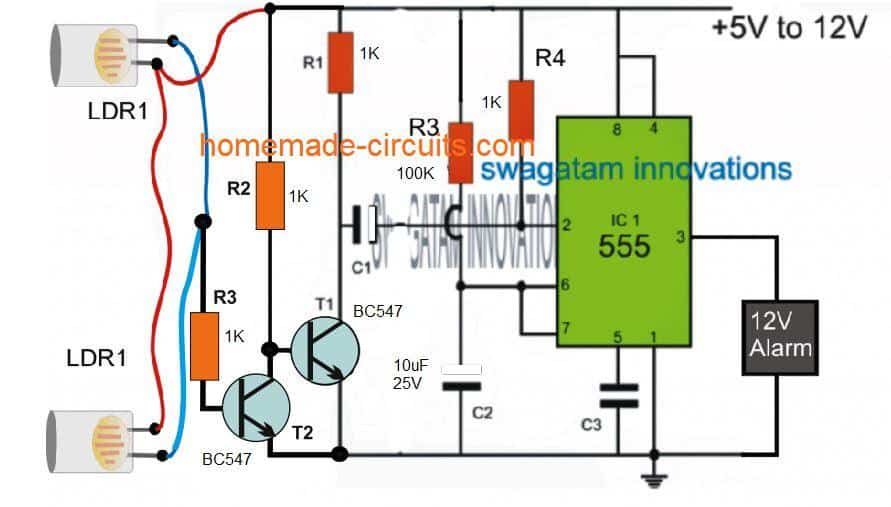
Một IC 4049 duy nhất có thể được sử dụng cho toàn bộ cảm biến, bắt đầu hành động dừng và thực hiện bảo vệ chạy khô.
Các cổng liên quan ở đây là 6 cổng KHÔNG từ IC 4049 về cơ bản được lắp ráp như bộ nghịch lưu (để đảo ngược cực tính của điện áp được cấp tại đầu vào của nó).
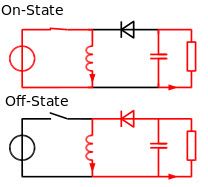
Giả sử nước bên trong bồn chứa trên đầu xuống dưới ngưỡng thấp hơn mong muốn, như được chỉ ra trong sơ đồ trên.
Tình huống này loại bỏ điện thế dương được cung cấp qua nước cho đầu vào của N1. N1 đáp ứng điều này bằng cách làm cho một cực dương xuất hiện ở chân đầu ra của nó, điều này ngay lập tức khiến C1 bắt đầu sạc qua R2.
Điều kiện trên cũng cho phép cực dương từ đầu ra của N1 đến đầu vào của N2, lần lượt tạo ra mức thấp hoặc âm ở gốc của T1 thông qua R3 .... rơle liên kết lúc này sẽ bật ON và kích hoạt 'START nút 'của công tắc tơ .... tuy nhiên kích hoạt rơ le chỉ được duy trì trong một giây hoặc lâu hơn cho đến khi C1 được sạc đầy, độ dài này có thể được thiết lập bằng cách điều chỉnh thích hợp các giá trị của C1 / R2.
Hiện tại, chúng ta hãy quên giai đoạn N5 / N6 được định vị để thực hiện bảo vệ chạy khô.
Giả sử máy bơm đang chạy và đổ nước vào bình OH.
Bây giờ nước bắt đầu đổ đầy vào bên trong bể, cho đến khi mức nước chạm đến vành của bể 'hôn' cảm biến tương ứng với đầu vào N3.
Điều này cho phép một cực dương qua nước để cung cấp cho đầu vào của N3, cho phép đầu ra của nó xuống thấp (âm), điều này ngay lập tức khiến C2 bắt đầu sạc qua R5, nhưng trong quá trình này, đầu vào của N4 cũng trở nên thấp và đầu ra của nó đảo ngược mức cao nhắc người điều khiển rơ le kích hoạt rơ le.
Rơ le phía trên kích hoạt ngay lập tức nhưng chỉ trong một giây, bật nút 'DỪNG' của công tắc tơ và tạm dừng động cơ bơm. Thời gian chuyển tiếp có thể được thiết lập bằng cách điều chỉnh thích hợp các giá trị của C2 / R5.
Phần giải thích ở trên liên quan đến việc kiểm soát mực nước tự động bằng cách bật nút khởi động / dừng chìm thông qua các rơ le của mạch. Bây giờ có thể rất thú vị khi tìm hiểu cách bảo vệ cạn kiệt được thiết kế để ngăn chặn nguy cơ cạn kiệt trong trường hợp không có nước bên trong giếng khoan hoặc bể chứa ngầm.
Hãy quay lại tình huống ban đầu khi nước trong OHT đã giảm xuống dưới ngưỡng thấp hơn và tạo ra mức thấp ở đầu vào của N1 .... cũng làm cho mức thấp ở đầu vào N5.
Đầu ra N5 tăng cao do điều này và cung cấp nguồn cung cấp tích cực cho C3 để nó có thể bắt đầu sạc.
Tuy nhiên, vì quá trình cũng được cho là khởi động động cơ, nếu có nước, máy bơm có thể bắt đầu đổ nước vào OHT được cho là được phát hiện bởi đầu vào của N6, khiến đầu ra của nó ở mức thấp.
Với đầu ra N6 ở mức thấp, C3 bị hạn chế sạc và tình hình vẫn tiếp tục bế tắc ... và động cơ tiếp tục bơm nước mà không có thay đổi trong các quy trình đã giải thích trước đó.
Tuy nhiên, giả sử động cơ bị chạy khô do không có nước trong giếng .... như đã nêu ở trên C3 bắt đầu sạc và đầu ra của N6 không bao giờ chuyển sang âm để ngăn C3 sạc đầy .... do đó C3 có thể để hoàn thành quá trình sạc trong một khoảng thời gian định trước (do C3 / R8 quyết định) và cuối cùng tạo ra mức cao (tích cực) ở đầu vào N3.
N3 đáp ứng điều này theo cách tương tự như nó sẽ làm khi nước trong bể được phát hiện ở ngưỡng trên cùng .... khiến việc chuyển đổi rơle phía trên và dừng động cơ chạy thêm nữa.
Do đó, bảo vệ chạy khô cho mạch khởi động, dừng máy bơm chìm đã thảo luận được thực hiện.
Danh sách các bộ phận
- R1, R4, R9 = 6M8
- R3, R7, R6 = 10K
- R8 = 100K
- R2, R5, C1, C2, C3 = được thử nghiệm
- N1 ------ N6 = IC 4049
- TẤT CẢ CÁC SỐ LƯỢNG = 1N4007
- RELAYS = 12V, 10AMP
- T1 = BC557
- T2 = BC547
Một cặp: Bộ điều chỉnh xe máy, Mạch kiểm tra chỉnh lưu Tiếp theo: Mạch mô phỏng đèn LED xoay