
CAN hoặc Mạng vùng điều khiển là công nghệ mạng nối tiếp tốc độ cao bán song công hai dây. Về cơ bản, nó được sử dụng trong giao tiếp giữa các thiết bị khác nhau trong vùng bán kính thấp, chẳng hạn như trong ô tô. Giao thức CAN là giao thức CSMA-CD / ASM hoặc các trọng tài phát hiện xung đột đa truy cập cảm nhận sóng mang trên giao thức ưu tiên bản tin. CSMA đảm bảo mỗi nút phải đợi trong một khoảng thời gian nhất định trước khi gửi bất kỳ thông báo nào. Phát hiện va chạm đảm bảo rằng va chạm được tránh bằng cách chọn các thông báo dựa trên mức độ ưu tiên quy định của chúng.
Nó cung cấp tốc độ truyền tín hiệu từ 125kbps đến 1 Mbps. Nó cung cấp cho 2048 mã nhận dạng tin nhắn khác nhau.
Nó là tiêu chuẩn ISO-11898 và sử dụng mô hình Kết nối Hệ thống Mở 7 lớp.
Lịch sử:
Nó được phát triển bởi Robert Bosch vào năm 1982 và chính thức được phát hành bởi Detroit’s Society of Automotive Engineers vào năm 1986. Chiếc xe đầu tiên tích hợp CAN bus được sản xuất bởi Mercedes Benz vào năm 1992.
Kiến trúc ISO 11898:

Nguồn ảnh - Theremino
Kiến trúc phân lớp bao gồm ba lớp
- Lớp ứng dụng : Nó tương tác với hệ điều hành hoặc ứng dụng của thiết bị CAN.
- Lớp liên kết dữ liệu : Nó kết nối dữ liệu thực tế với giao thức về mặt gửi, nhận và xác thực dữ liệu.
- Lớp vật lý : Nó đại diện cho phần cứng thực tế.
Khung CAN tiêu chuẩn bao gồm các bit sau:
 Khung CAN tiêu chuẩn bao gồm các bit sau:
Khung CAN tiêu chuẩn bao gồm các bit sau:
- SOF- Bắt đầu của Fr người đẹp. Thông điệp bắt đầu từ thời điểm này.
- Nhận định : Nó quyết định mức độ ưu tiên của thông điệp. Giá trị nhị phân thấp hơn, ưu tiên cao hơn. Nó là 11 bit.
- RTR - Yêu cầu truyền từ xa. Nó chiếm ưu thế khi thông tin được yêu cầu từ một nút khác. Mỗi nút nhận được yêu cầu, nhưng chỉ nút có định danh khớp với thông báo mới là nút bắt buộc. Mỗi nút cũng nhận được phản hồi .z
- ĐÂY - Mở rộng Nhận dạng Đơn lẻ. Nếu nó chiếm ưu thế, điều đó có nghĩa là một định danh CAN tiêu chuẩn không có phần mở rộng đang được truyền đi.
- R0 - bit dành riêng.
- DLC - Mã độ dài dữ liệu. Nó xác định độ dài của dữ liệu được gửi. Nó là 4 bit
- Dữ liệu - Có thể truyền tới 64 bit dữ liệu.
- CRC - Kiểm tra dự phòng theo chu kỳ. Nó chứa tổng kiểm tra (số bit được truyền) của dữ liệu ứng dụng trước đó để phát hiện lỗi.
- ALAS - Công nhận. Nó dành cho 2 bit. Nó chiếm ưu thế nếu một tin nhắn chính xác được nhận.
- EOF - cuối khung. Nó đánh dấu sự kết thúc của khung lon và vô hiệu hóa việc nhồi bit.
- IFS - Không gian Liên Khung. Nó chứa thời gian mà bộ điều khiển yêu cầu để di chuyển một khung đã nhận đúng đến vị trí thích hợp của nó.
5 loại tin nhắn khác nhau là:
- Khung dữ liệu : Nó bao gồm một trường tùy ý, trường dữ liệu, trường CRC và các trường xác nhận.
- Khung từ xa : Nó yêu cầu truyền dữ liệu từ một nút khác. Ở đây, bit RTR là bit lặn.
- Khung lỗi : Nó được truyền khi phát hiện ra lỗi.
- Khung quá tải : Nó được sử dụng để cung cấp độ trễ giữa các tin nhắn. Nó được truyền khi các nút trở nên quá bận.
- Khung hợp lệ : Thông báo hợp lệ nếu trường EOF là trường lặn. Nếu không, tin nhắn được truyền lại.
Lớp vật lý CÓ THỂ:
Có thể xe buýt

Nguồn ảnh - digital.ni
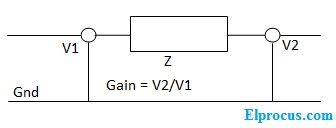
Nó bao gồm một liên kết nối tiếp hai dây - CAN_H và CAN_L và các mức điện áp của chúng so với nhau xác định xem 1 hay 0 được truyền đi. Đây là tín hiệu vi sai. Dòng điện chạy trong mỗi đường tín hiệu bằng nhau nhưng ngược chiều, dẫn đến hiệu ứng triệt tiêu trường, đây là chìa khóa để phát ra tiếng ồn thấp. Điều này đảm bảo tín hiệu vi sai cân bằng làm giảm ghép nhiễu và cho phép tốc độ truyền cao qua dây. Thông thường, các dây dẫn là cáp xoắn đôi với chiều dài bus là 40 m và tối đa là 30 nút. Nó là cáp có vỏ bọc hoặc không có vỏ bọc với trở kháng đặc trưng là 120 Ohms.
CÓ THỂ CHUYỂN KHOẢN:

CÓ THỂ cho xe của Hugo Provencher. Hai dây CANH và CANL bình thường là 2,5V được xác định bởi hai tranzito và nguồn hiệu điện thế 2,5V. Về cơ bản sự khác biệt giữa hai dây phải luôn là 0. Bộ điều khiển trình điều khiển xác định điện áp áp dụng cho các dây CANH và CANL. Khi cả hai bóng bán dẫn đang dẫn, điện áp giảm trên 1sttransistor và diode là 1,5V, làm cho dây CANH kéo lên 3,5V. Điện áp giảm trên 2ndtransistor và diode là 1V, làm cho dây CANL kéo xuống 1,5V. Điốt được sử dụng để bảo vệ điện áp cao. Máy thu là một mạch phân biệt cho đầu ra là 1 khi hai đầu vào CANH và CANL giống nhau và đầu ra là 0 nếu hai đầu vào khác nhau. Khối ưu thế TXD được sử dụng để bảo vệ lỗi chạm đất và khối tắt nhiệt vô hiệu hóa điều khiển trình điều khiển nếu điốt và bóng bán dẫn bị quá nhiệt.
Ưu điểm của CAN:
- Nó làm giảm hệ thống dây điện vì đây là điều khiển phân tán và điều này đảm bảo nâng cao hiệu suất hệ thống.
- Nhiều nhà sản xuất chip CAN đã cung cấp lớp liên kết dữ liệu và lớp vật lý được giao tiếp với chip và tất cả những gì nhà phát triển phần mềm cần làm chỉ là phát triển mã ứng dụng.
- Nó cung cấp khả năng làm việc trong các môi trường điện khác nhau và đảm bảo truyền dẫn không gây tiếng ồn.
- Sự tắc nghẽn lưu lượng được loại bỏ khi các thông điệp được truyền dựa trên mức độ ưu tiên của chúng và nó cho phép toàn bộ mạng đáp ứng các hạn chế về thời gian.
- Nó cung cấp khả năng truyền không có lỗi vì mỗi nút có thể kiểm tra lỗi trong quá trình truyền thông điệp và gửi khung lỗi.
Ví dụ làm việc có thể:
Bộ điều khiển Khu vực Mạng có các ứng dụng rộng lớn trong công nghiệp cũng như trong xe cộ. Một trong những ứng dụng chính liên quan đến giao tiếp giữa các thiết bị khác nhau trong xe. Một bộ vi điều khiển khác có thể nằm trong số các bộ vi điều khiển khác nhau, giả sử để phát hiện mật khẩu, được sử dụng để đáp ứng bất kỳ yêu cầu nào như mở cửa bị khóa bằng mật khẩu hoặc bật bóng đèn, v.v.

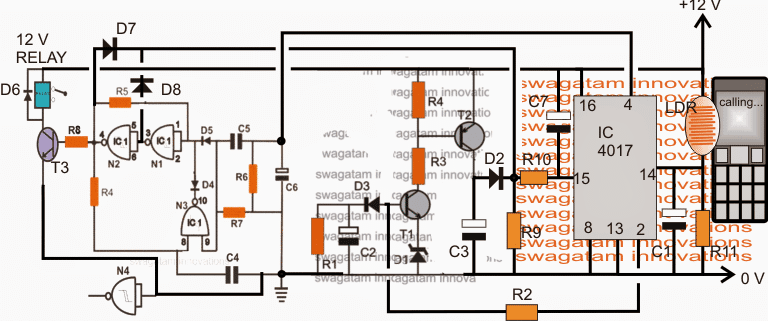
Mạch mạng vùng điều khiển
Ứng dụng cơ bản bao gồm 3 vi điều khiển giao tiếp với nhau bằng hai dây như trong mạng CAN. Cái 1stbộ vi điều khiển được giao diện với một bàn phím, 2ndvới màn hình LCD và thứ ba có còi và rơ le vận hành đèn. Khi nhập mật khẩu vào bàn phím, 2ndvi điều khiển hoạt động như một bộ thu và nhận bản tin được truyền từng chút một từ 1stphát và hiển thị thông báo trên màn hình LCD. Khi toàn bộ thông điệp được truyền đi, 2ndbộ vi điều khiển thực hiện xác minh và nếu mật khẩu sai, nó sẽ gửi tín hiệu đến 3rdbộ vi điều khiển, từ đó gửi buzzer được bật với tín hiệu này. Khi mật khẩu đúng, 3rdbộ vi điều khiển bật rơ le và lần lượt bật đèn.




![Mạch phát hiện ion [Máy dò phóng điện tĩnh]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)

{kind=link}
{kind=link}