
Thông thường, robot điều khiển từ xa sử dụng mạch RF, có nhược điểm là phạm vi làm việc hạn chế, khả năng điều khiển hạn chế và dải tần số hạn chế. Để khắc phục những nhược điểm này, điện thoại di động điều hành Land rover phương tiện robot được sử dụng. Nó cung cấp những lợi thế của điều khiển bằng robot, bộ điều khiển không xâm nhập và lên đến mười hai hệ thống điều khiển, v.v.
Mặc dù khả năng và sự xuất hiện của người máy nhúng rất khác nhau, tất cả các rô bốt đều có chung các tính năng của một cấu trúc cơ học, có thể chuyển động dưới một số hình thức điều khiển. Việc điều khiển robot bao gồm ba giai đoạn khác nhau, chúng là nhận thức, xử lý và hành động. Thông thường, các cảm biến được gắn trên robot. Việc nhận biết và xử lý được thực hiện bởi bộ vi điều khiển trên bo mạch và hoạt động được thực hiện bằng động cơ.
Điện thoại di động vận hành xe robot Land Rover

Điện thoại di động Land Rover Robotic Vehicle vận hành bởi Edgefxkits.com
Mục đích chính của dự án này là điều khiển một cánh tay robot được gắn trên một chiếc xe robot bằng cách sử dụng điện thoại di động. Nó cung cấp một phạm vi làm việc lớn và kiểm soát mạnh mẽ, v.v.
Sơ đồ khối của Điện thoại di động Xe robot Land Rover:

Sơ đồ khối của điện thoại di động Land Rover đã vận hành
Các khối xây dựng chính là vi điều khiển, Điện thoại di động, Bộ giải mã DTMF và mạch điều khiển DC-Motor. Điện thoại di động là bộ phận quan trọng nhất của toàn bộ hệ thống vì toàn bộ hệ thống hoạt động và được kích hoạt bởi điện thoại di động. DTMF (đa tần số âm kép) nhận tín hiệu đầu vào từ điện thoại di động và giải mã nó, sau đó tạo ra đầu ra kỹ thuật số 4 bit của Vi điều khiển 8051 . Khi bộ giải mã DTMF đưa ra đầu ra kỹ thuật số, nó cũng tạo ra ngắt mọi lúc.
Bộ vi điều khiển là trái tim của toàn bộ hệ thống vì nó thực hiện toàn bộ các hành động điều khiển. Bộ vi điều khiển phụ thuộc vào mã do bộ giải mã DTMF tạo ra để di chuyển con lăn sang phải hoặc trái và tiến hoặc lùi bằng cách quay cả hai động cơ DC. Trình điều khiển động cơ DC nhận tín hiệu kích hoạt từ vi điều khiển theo logic thấp hoặc cao, sau đó nó khuếch đại và quay hai động cơ theo cả hai hướng.
Việc điều khiển robot chủ yếu bao gồm bốn giai đoạn khác nhau: nhận thức, xử lý hành động và phát hiện. Trong giai đoạn nhận biết nếu điện thoại di động gắn với rô bốt nhận cuộc gọi, thì hành động nhấn phím trên điện thoại di động sẽ giải mã âm DTMF được tạo ra. Sau đó, chip giải mã nhận tín hiệu âm thanh từ điện thoại di động và sau đó chuyển đổi giai điệu DTMF thành mã nhị phân, sau đó được đưa đến bộ vi điều khiển. Trong dự án này, IC MT88710 được sử dụng làm bộ giải mã DTMF. Trong giai đoạn xử lý, bộ vi điều khiển xử lý mã nhị phân nhận được từ bộ giải mã DTMF. Các Bộ vi điều khiển được lập trình trước bằng ‘C’ để thực hiện tác vụ cụ thể này theo các bit đầu vào.
Ở giai đoạn hành động, chuyển động quay của động cơ phụ thuộc vào đầu vào do vi điều khiển cung cấp. Hai động cơ DC, mỗi động cơ 30 vòng / phút được sử dụng cho máy quét đất và được điều khiển bằng IC điều khiển động cơ. Khi phát hiện sân khấu và để phát hiện chướng ngại vật, máy phát và máy thu hồng ngoại được sử dụng cùng với bộ rung. Khi chướng ngại vật đến trước mặt robot, bộ phát IR sẽ truyền các tia IR trên đối tượng, sau đó đối tượng phản xạ các tia IR tới bộ thu IR. Bộ thu IR sau đó sẽ nhận các tia IR để kích hoạt bộ rung.
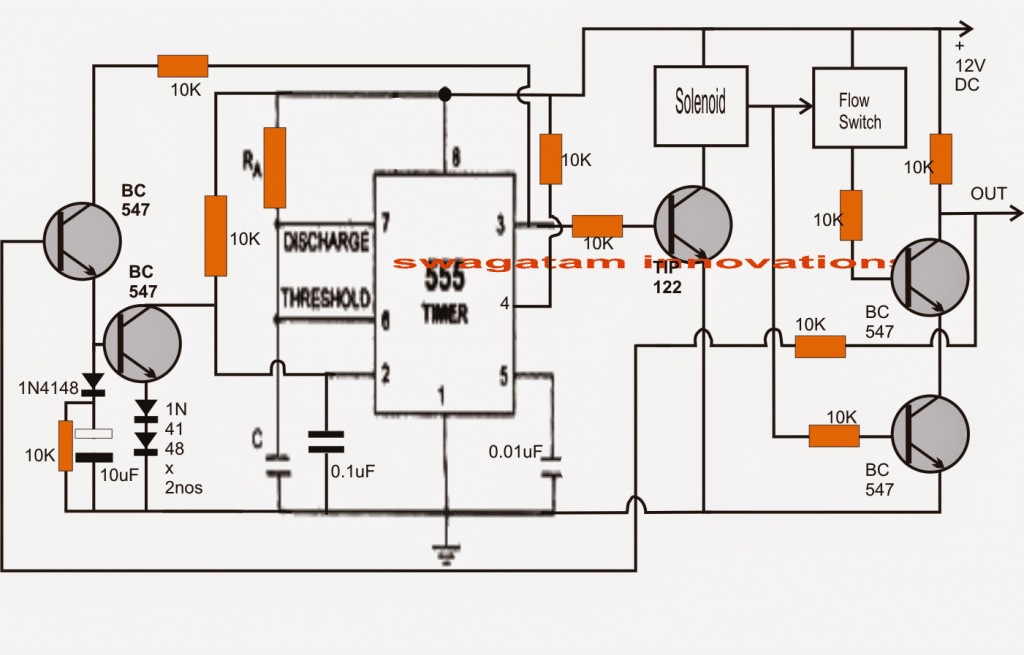
Sơ đồ mạch của máy di động trên đất điều hành bằng điện thoại di động Xe robot:
Các thành phần chính của tàu đổ bộ robot vận hành bằng điện thoại di động này là vi điều khiển, trình điều khiển động cơ và bộ giải mã DTMF. Bộ giải mã DTMF sê-ri MT8870 được sử dụng trong dự án này, sử dụng kỹ thuật đếm kỹ thuật số để phát hiện 16 cặp âm DTMF thành đầu ra mã 4 bit. Mạch quay số tích hợp giúp loại bỏ quá trình lọc trước. Nếu tín hiệu đầu vào được đưa ra tại chân 2, thì cấu hình đầu vào được công nhận là có hiệu lực. Tín hiệu giải mã 4 bit của âm DTMF được chuyển đến chân 11 thông qua đầu ra của chân 14. Các chân này được kết nối với các chân của vi điều khiển Pao, Pa1, Pa2 và Pa3. Đầu ra của bộ vi điều khiển từ các chân cổng PD0 đến PD3 và PD7 được cấp cho các đầu vào IN1, IN4 và cho phép các chân EN1, EN2 của IC L293D điều khiển động cơ điều khiển hai động cơ DC .

Sơ đồ mạch của điện thoại di động Land Rover vận hành
Trong mạch này, công tắc S1 được sử dụng để thiết lập lại bằng tay. Đầu ra của bộ vi điều khiển không đủ để điều khiển động cơ DC, do đó, trình điều khiển dòng điện là cần thiết để quay động cơ. Bộ điều khiển động cơ L293D được thiết kế để cung cấp dòng truyền động hai chiều lên đến 600 mA ở điện áp từ 4,5V đến 36V, dễ dàng hơn để điều khiển động cơ DC. Trình điều khiển động cơ L293D bao gồm bốn trình điều khiển. Các chân IN1 đến IN4 & OUT1 và OUT4 là các chân đầu vào và đầu ra của trình điều khiển 1 đến trình điều khiển 4. Các trình điều khiển 1,2,3 và 4 được kích hoạt bởi chân kích hoạt1 (EN1) và chân 9 (EN2). Khi bật đầu vào EN1 (pin1) ở mức cao, trình điều khiển 1 và 2 được bật. Tương tự, đầu vào bật EN2 (pin9) cho phép các trình điều khiển 3.
Ưu điểm và nhược điểm:
Những ưu điểm của tàu đổ bộ robot điều khiển bằng điện thoại di động bao gồm hệ thống cung cấp và giám sát điều khiển không dây, điều hướng phương tiện dựa trên công nghệ 3G và phạm vi hoạt động vô hạn dựa trên mạng của điện thoại di động. Những bất lợi bao gồm: chi phí vì thanh toán điện thoại di động cao pin di động xả : vấn đề phóng điện liên quan đến pin vì pin mất điện do xả nhanh vì tải có khả năng thích ứng cao: hệ thống không thể thích ứng với tất cả các điện thoại di động, nhưng chỉ có thể sử dụng các điện thoại có tai nghe.
Vì vậy, dự án robot điều khiển bằng điện thoại di động này rất hữu ích trong các ứng dụng quân sự để điều khiển các phương tiện quân sự bằng cách sử dụng điện thoại di động. Trong tương lai, chúng ta có thể phát hiện vị trí của kẻ thù bằng cách sắp xếp camera không dây đến phương tiện robot robot trên mặt đất. Dự án này cũng có thể hữu ích trong học thuật vì sinh viên có thể học các thuật ngữ và nguyên tắc khác nhau được đề xuất trong dự án này. Dự án này sẽ giúp sinh viên bổ sung những suy nghĩ và ý tưởng đổi mới của họ để phát triển các dự án người máy .
Tín ảnh:
- Điện thoại di động do Land Rover điều hành santoshbanisetty
- Sơ đồ mạch của điện thoại di động Land Rover do kỹ sư








{kind=link}