Mạch VFD 3 pha được trình bày ( thiết kế bởi tôi ) có thể được sử dụng để điều khiển tốc độ của bất kỳ động cơ xoay chiều có chổi than ba pha nào hoặc thậm chí là động cơ xoay chiều không chổi than. Ý tưởng do ông Tom yêu cầu
Sử dụng VFD
Mạch VFD 3 pha được đề xuất có thể được áp dụng phổ biến cho hầu hết các động cơ xoay chiều 3 pha mà hiệu suất điều chỉnh không quá quan trọng.
Nó có thể được sử dụng đặc biệt để kiểm soát tốc độ động cơ cảm ứng lồng sóc với chế độ vòng lặp mở và có thể cả ở chế độ vòng lặp đóng sẽ được thảo luận trong phần sau của bài viết.
Yêu cầu mô-đun cho Biến tần 3 pha
Để thiết kế mạch VFD 3 pha hoặc mạch biến tần được đề xuất, các giai đoạn mạch cơ bản sau đây về cơ bản được yêu cầu:
- Mạch điều khiển điện áp PWM
- Mạch điều khiển cầu H phía bên cao / bên thấp 3 pha
- Mạch phát điện 3 pha
- Mạch biến đổi điện áp sang tần số tạo thông số V / Hz.
Hãy cùng tìm hiểu chi tiết hoạt động của các giai đoạn trên với sự trợ giúp của phần giải thích sau:
Một mạch điều khiển điện áp PWM đơn giản có thể được chứng kiến trong sơ đồ dưới đây:

Bộ điều khiển PWM
Tôi đã kết hợp và giải thích hoạt động của giai đoạn tạo PWM ở trên, về cơ bản được thiết kế để tạo ra một đầu ra PWM khác nhau trên chân 3 của IC2 để đáp ứng với tiềm năng được áp dụng tại chân 5 của cùng một IC.
Giá trị đặt trước 1K được hiển thị trong sơ đồ là núm điều khiển RMS, có thể được điều chỉnh thích hợp để có được lượng điện áp đầu ra tương ứng mong muốn ở dạng PWM tại chân 3 của IC2 để xử lý thêm. Điều này được đặt để tạo ra đầu ra tương ứng có thể tương đương với nguồn điện lưới 220V hoặc 120V AC RMS.
Mạch điều khiển cầu H
Sơ đồ tiếp theo dưới đây cho thấy một mạch điều khiển 3 pha cầu H đơn chip sử dụng IC IRS2330.
Thiết kế trông đơn giản vì hầu hết các phức tạp đều được xử lý bởi các chip mạch phức tạp tích hợp sẵn.
Tín hiệu 3 pha được tính toán tốt được áp dụng trên các đầu vào HIN1 / 2/3 và LIN1 / 2/3 của IC thông qua giai đoạn tạo tín hiệu 3 pha.
Kết quả đầu ra của IC IRS2330 có thể được nhìn thấy được tích hợp với mạng cầu 6 mosfet hoặc IGBTs, có các cống được cấu hình thích hợp với động cơ cần được điều khiển.
Các cổng mosfet / IGBT phía thấp được tích hợp với chân IC2 # 3 của giai đoạn mạch tạo PWM đã thảo luận ở trên để bắt đầu tiêm PWM vào giai đoạn mosfet cầu. Quy định này cuối cùng giúp động cơ đạt được tốc độ mong muốn theo cài đặt (thông qua 1 k cài đặt trước trong sơ đồ đầu tiên).

Trong sơ đồ sau chúng ta hình dung mạch tạo tín hiệu 3 pha theo yêu cầu.

Cấu hình mạch máy phát điện 3 pha
Máy phát điện 3 pha được xây dựng xung quanh một vài chip CMOS CD4035 và CD4009 tạo ra tín hiệu 3 pha có kích thước chính xác trên các sơ đồ chân được hiển thị.
Tần số của tín hiệu 3 pha phụ thuộc vào đồng hồ đầu vào được cấp nguồn, tần số này phải gấp 6 lần tín hiệu 3 pha dự định. Có nghĩa là, nếu tần số 3 pha yêu cầu là 50 Hz thì xung nhịp đầu vào phải là 50 x 6 = 300 Hz.
Nó cũng ngụ ý rằng các đồng hồ trên có thể được thay đổi để thay đổi tần số hiệu dụng của IC điều khiển, do đó sẽ chịu trách nhiệm thay đổi tần số hoạt động của động cơ.
Tuy nhiên, vì sự thay đổi tần số ở trên cần phải tự động để đáp ứng với điện áp thay đổi, nên một bộ chuyển đổi điện áp thành tần số trở nên cần thiết. Giai đoạn tiếp theo thảo luận về một mạch chuyển đổi điện áp sang tần số chính xác đơn giản để thực hiện theo yêu cầu.
Cách tạo tỷ lệ V / F không đổi
Thông thường, trong động cơ cảm ứng, để duy trì hiệu suất tối ưu của tốc độ động cơ và tốc độ quay, tốc độ trượt hoặc tốc độ rôto cần phải được điều khiển để trở nên khả thi bằng cách duy trì tỷ số V / Hz không đổi. Vì từ thông stato luôn không đổi bất kể tần số nguồn cung cấp đầu vào, tốc độ rôto trở nên dễ dàng điều khiển bằng duy trì tỷ số V / Hz không đổi .
Trong chế độ vòng lặp mở, điều này có thể được thực hiện gần như bằng cách duy trì tỷ lệ V / Hz xác định trước và thực hiện nó theo cách thủ công. Ví dụ trong sơ đồ đầu tiên, điều này có thể được thực hiện bằng cách điều chỉnh thích hợp R1 và giá trị đặt trước 1K. R1 xác định tần số và 1K điều chỉnh RMS của đầu ra, do đó, bằng cách điều chỉnh phù hợp hai tham số, chúng ta có thể thực thi số lượng V / Hz cần thiết theo cách thủ công.
Tuy nhiên, để có được điều khiển tương đối chính xác mô-men xoắn và tốc độ động cơ cảm ứng, chúng ta phải thực hiện chiến lược vòng kín, trong đó dữ liệu tốc độ trượt cần được cung cấp cho mạch xử lý để tự động điều chỉnh tỷ lệ V / Hz sao cho giá trị luôn luôn gần không đổi.
Triển khai phản hồi về vòng lặp đã đóng
Sơ đồ đầu tiên trên trang này có thể được sửa đổi phù hợp để thiết kế bộ điều chỉnh V / Hz tự động vòng kín như hình dưới đây:

Trong hình trên, điện thế ở chân số 5 của IC2 xác định độ rộng của SPWM được tạo ra ở chân số 3 của cùng một vi mạch. SPWM được tạo ra bằng cách so sánh mẫu gợn sóng nguồn 12V ở chân số 5 với sóng tam giác ở chân số 7 của IC2 và điều này được cấp cho các mosfet bên thấp để điều khiển động cơ.
Ban đầu SPWM này được đặt ở một số mức đã điều chỉnh (sử dụng bộ tính 1K) để kích hoạt các cổng IGBT phía thấp của cầu 3 pha để bắt đầu chuyển động của rôto ở mức tốc độ danh định đã chỉ định.
Ngay khi rôto rôto bắt đầu quay, máy đo tốc độ được gắn với cơ cấu rôto gây ra một lượng điện áp bổ sung tỷ lệ thuận phát triển ở chân số 5 của IC2, điều này làm cho các SPWM rộng hơn gây ra nhiều điện áp hơn cho các cuộn dây stato của động cơ. Điều này làm tăng thêm tốc độ rôto gây ra nhiều điện áp hơn ở chân số 5 của IC2, và điều này tiếp tục cho đến khi điện áp tương đương SPWM không còn có thể tăng và đồng bộ rôto stato đạt được trạng thái ổn định.
Quy trình trên sẽ tự điều chỉnh trong suốt thời gian hoạt động của động cơ.
Cách tạo và tích hợp máy đo tốc độ
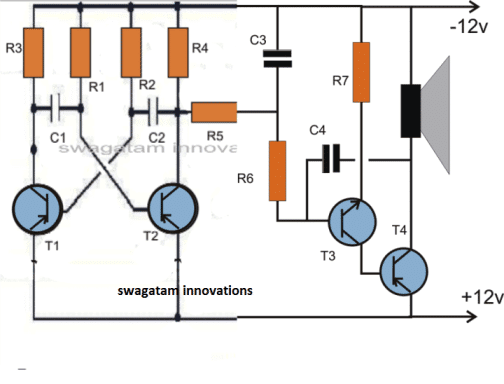
Một thiết kế máy đo tốc độ đơn giản có thể được nhìn thấy trong sơ đồ sau, điều này có thể được tích hợp với cơ chế rôto để tần số quay có thể cung cấp cho cơ sở của BC547.

Tại đây, dữ liệu tốc độ rôto được thu thập từ cảm biến hiệu ứng Hall hoặc mạng IR LED / Cảm biến và được đưa đến đế của T1.
T1 dao động ở tần số này và kích hoạt mạch máy đo tốc độ được thực hiện bằng cách cấu hình thích hợp một mạch ổn định IC 555.
Đầu ra từ máy đo tốc độ ở trên thay đổi tỷ lệ thuận với tần số đầu vào tại cơ sở của T1.
Khi tần số tăng, điện áp ở cực bên phải đầu ra D3 cũng tăng và ngược lại, và giúp giữ tỷ lệ V / Hz ở mức tương đối ổn định.
Cách kiểm soát tốc độ
Tốc độ của động cơ sử dụng V / F không đổi có thể đạt được bằng cách thay đổi đầu vào tần số ở đầu vào xung nhịp của IC 4035. Điều này có thể đạt được bằng cách cấp một tần số thay đổi từ mạch ổn định IC 555 hoặc bất kỳ mạch ổn định tiêu chuẩn nào đến đầu vào xung nhịp của IC 4035.
Thay đổi tần số làm thay đổi hiệu quả tần số hoạt động của động cơ, tương ứng làm giảm tốc độ trượt.
Điều này được phát hiện bởi máy đo tốc độ và máy đo tốc độ làm giảm tương ứng điện thế ở chân số 5 của IC2, do đó làm giảm hàm lượng SPWM trên động cơ một cách tương ứng, và do đó điện áp cho động cơ giảm, đảm bảo thay đổi tốc độ động cơ một cách chính xác tỷ lệ V / F yêu cầu.
Bộ chuyển đổi V sang F tự chế

Trong mạch chuyển đổi điện áp sang tần số ở trên, một IC 4060 được sử dụng và điện trở phụ thuộc tần số của nó được ảnh hưởng thông qua một cụm đèn LED / LDR cho các chuyển đổi dự định.
Cụm đèn LED / LDR được niêm phong bên trong hộp chống sáng và LDR được đặt trên điện trở phụ thuộc tần số 1M của IC.
Vì đáp ứng LDR / LDR khá tuyến tính, nên độ chiếu sáng khác nhau của đèn LED trên LDR tạo ra tần số thay đổi tương ứng (tăng hoặc giảm) trên chân 3 của IC.
FSD hoặc phạm vi V / Hz của vùng hiển thị có thể được thiết lập bằng cách thiết lập thích hợp điện trở 1M hoặc thậm chí giá trị C1.
Đèn LED là điện áp được lấy và chiếu sáng qua các PWM từ giai đoạn mạch PWM đầu tiên. Nó ngụ ý rằng khi các PWM khác nhau, độ chiếu sáng của đèn LED cũng sẽ khác nhau, do đó sẽ làm phát sinh tần số tăng hoặc giảm tương ứng ở chân 3 của IC 4060 trong sơ đồ trên.
Tích hợp Bộ chuyển đổi với VFD
Sự thay đổi tần số này từ IC 4060 bây giờ chỉ cần được tích hợp với đầu vào xung clock IC CD4035 của máy phát điện 3 pha.
Các công đoạn trên tạo thành những nguyên liệu chính để tạo nên một mạch VFD 3 pha.
Bây giờ, điều quan trọng là phải thảo luận về DC BUS cần thiết để cung cấp bộ điều khiển động cơ IGBT và các quy trình thiết lập cho toàn bộ thiết kế.
Có thể thu được BUS DC qua các thanh cầu IGBT H bằng cách chỉnh lưu đầu vào nguồn điện 3 pha có sẵn bằng cách sử dụng cấu hình mạch sau. Các đường ray IGBT DC BUS được kết nối qua các điểm được chỉ định là 'tải'

Đối với nguồn một pha, việc chỉnh lưu có thể được thực hiện bằng cách sử dụng cấu hình mạng cầu điốt 4 tiêu chuẩn.
Cách thiết lập mạch VFD 3 pha được đề xuất
Nó có thể được thực hiện theo hướng dẫn sau:
Sau khi áp dụng điện áp bus DC trên các IGBT (không có động cơ được kết nối), hãy điều chỉnh giá trị đặt trước PWM 1k cho đến khi điện áp trên các đường ray trở nên bằng với thông số điện áp dự định của động cơ.
Tiếp theo điều chỉnh cài đặt trước IC 4060 1M để điều chỉnh bất kỳ đầu vào IC IRS2330 nào đến mức tần số chính xác cần thiết theo thông số kỹ thuật động cơ nhất định.
Sau khi hoàn thành các quy trình trên, động cơ được chỉ định có thể được kết nối và cung cấp với các mức điện áp khác nhau, thông số V / Hz và được xác nhận cho hoạt động V / Hz tự động trên động cơ được kết nối.
Trước: Cách xây dựng mạch đèn phát triển Tiếp theo: Đã khám phá mạch làm mềm nước