
Đánh giá thành công đầu tiên về lý thuyết điều khiển PID đã được kiểm chứng thực tế trong lĩnh vực hệ thống lái tự động cho tàu thủy, cách đây khoảng năm 1920. Sau đó, nó được áp dụng trong các điều khiển quy trình tự động công nghiệp khác nhau đòi hỏi các thông số kỹ thuật đầu ra sản xuất tối ưu và chính xác. Đối với các đơn vị sản xuất, PID được sử dụng phổ biến để đạt được điều khiển khí nén chính xác, và cuối cùng lý thuyết PID đã được áp dụng trong các bộ điều khiển điện tử trong thời hiện đại.
Bộ điều khiển PID là gì
Thuật ngữ PID là từ viết tắt của bộ điều khiển đạo hàm tích phân tỷ lệ, là một cơ chế vòng phản hồi, được thiết kế để điều khiển chính xác các máy móc điều khiển công nghiệp khác nhau và nhiều ứng dụng tương tự khác yêu cầu điều khiển điều chế quan trọng và tự động.
Để thực hiện điều này, bộ điều khiển PID liên tục giám sát hoạt động của hệ thống và tính toán phần tử lỗi gây ra. Sau đó, nó đánh giá giá trị lỗi tức thời này dưới dạng sự khác biệt giữa điểm đặt yêu cầu (SP) và biến quá trình đo được (PV).
Với tham chiếu ở trên, hiệu chỉnh phản hồi tức thời và tự động được thực hiện theo các biểu thức tỷ lệ (P), tích phân (I) và đạo hàm (D), và do đó có tên là bộ điều khiển PID.
Nói cách đơn giản, bộ điều khiển PID liên tục giám sát hoạt động của một hệ thống máy nhất định và tiếp tục điều chỉnh phản ứng đầu ra của nó tùy thuộc vào các biến thể do tác động bên ngoài gây ra, thông qua một thuật toán được chỉ định. Do đó nó đảm bảo rằng máy luôn hoạt động trong điều kiện lý tưởng quy định.
Hiểu sơ đồ khối PID
Bộ điều khiển PID được coi là một hệ thống điều khiển đa năng do khả năng phát hiện và quản lý 3 tham số điều khiển: tỷ lệ, tích phân và đạo hàm, đồng thời áp dụng điều khiển tối ưu dự kiến trên đầu ra với độ chính xác cực cao, có tham chiếu đến 3 tham số này.
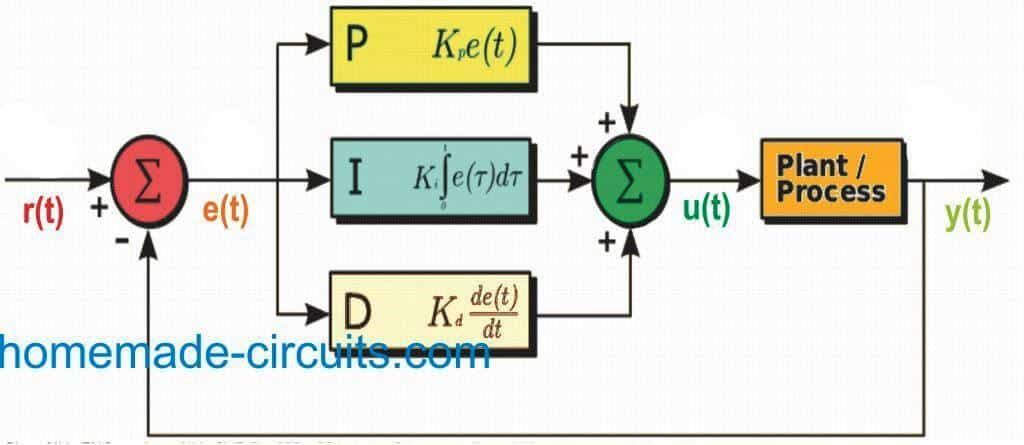
Hình ảnh dưới đây cho thấy sơ đồ khối của PID. Chúng ta có thể nhanh chóng hiểu được nguyên lý hoạt động cơ bản của PID bằng cách tham khảo sơ đồ khối này.

hình ảnh lịch sự: en.wikipedia.org/wiki/File:PID_en.svg
Ở đây chúng ta có thể thấy một tập hợp các biến như e (t) tương ứng với giá trị lỗi, r (t) tương ứng với điểm đặt mục tiêu và y (t) là biến quá trình được đo lường. Bộ điều khiển PID trong suốt quá trình hoạt động của nó giám sát giá trị lỗi e (t) bằng cách đánh giá sự khác biệt giữa điểm đặt r (t) hoặc SP dự kiến và giá trị quá trình đo được y (t) hoặc PV, và do đó thực hiện hiệu chỉnh hoặc tối ưu hóa phản hồi bằng cách sử dụng các tham số cụ thể là: tỉ lệ, tích phân và đạo hàm.
Bộ điều khiển tiếp tục nỗ lực để giảm hiệu ứng lỗi trong suốt, bằng cách điều chỉnh biến điều khiển u (t) thành các giá trị mới dựa trên tổng trọng số đã phân tích của các số hạng điều khiển (p, I, d).
Ví dụ, trong hoạt động của bộ điều khiển van, việc mở và đóng van của nó có thể liên tục thay đổi bởi PID thông qua các đánh giá phức tạp, như đã giải thích ở trên.
Trong hệ thống hiển thị, các thuật ngữ khác nhau có thể được hiểu như được giải thích dưới đây:
P- Bộ điều khiển:
Thuật ngữ P tỷ lệ với giá trị sai số tức thời e (t) nhận được bằng cách đánh giá kết quả cho SP - PV. Trong tình huống khi giá trị lỗi có xu hướng lớn hơn, đầu ra điều khiển cũng lớn hơn tương ứng với tham chiếu đến hệ số khuếch đại “K”. Tuy nhiên, trong một quy trình yêu cầu bù trừ như kiểm soát nhiệt độ, kiểm soát tỷ lệ đơn thuần có thể dẫn đến sự không chính xác trên điểm đặt và giá trị quy trình thực tế, vì nó không thể hoạt động tốt nếu không có phản hồi lỗi để tạo ra phản hồi tỷ lệ. Ngụ ý rằng nếu không có phản hồi về lỗi thì có thể không có phản hồi sửa chữa thích hợp.
I- Bộ điều khiển:
Thuật ngữ I chịu trách nhiệm về các giá trị đã đánh giá trước đó của lỗi SP - PV và tích hợp chúng trong thời gian hoạt động của nó để tạo ra thuật ngữ I. Ví dụ: trong khi điều khiển tỷ lệ đang được áp dụng nếu SP - PV tạo ra một số lỗi, tham số I hoạt động và cố gắng chấm dứt lỗi còn lại này. Điều này thực sự xảy ra với phản hồi điều khiển được kích hoạt do giá trị tích lũy của lỗi được ghi lại ở thời điểm trước đó. Ngay sau khi điều này xảy ra, thuật ngữ I ngừng tăng cường thêm nữa. Điều này làm cho hiệu ứng tỷ lệ giảm thiểu tương ứng khi hệ số sai số giảm đi, mặc dù điều này cũng được bù khi hiệu ứng tích phân phát triển.
D- Bộ điều khiển:
Thuật ngữ D là một ước lượng gần đúng phù hợp nhất được suy ra cho các xu hướng phát triển của sai số SP - PV, tùy thuộc vào tốc độ thay đổi tức thời của hệ số sai số. Nếu tốc độ thay đổi này tăng lên nhanh chóng, kiểm soát phản hồi được triển khai mạnh mẽ hơn và ngược lại.
Điều chỉnh PID là gì
Các tham số được thảo luận ở trên có thể yêu cầu cân bằng chính xác để đảm bảo chức năng điều khiển tối ưu và điều này đạt được thông qua một quá trình gọi là 'điều chỉnh vòng lặp'. Các hằng số điều chỉnh liên quan được ký hiệu là 'K' như được hiển thị trong các suy luận sau. Mỗi hằng số này phải được dẫn xuất riêng cho một ứng dụng đã chọn, vì các hằng số phụ thuộc chặt chẽ và thay đổi theo đặc tính và ảnh hưởng của các tham số bên ngoài cụ thể liên quan đến vòng lặp. Chúng có thể bao gồm phản ứng của các cảm biến được sử dụng để đo một thông số nhất định, phần tử điều tiết cuối cùng như van điều khiển, thời gian có thể xảy ra trong tín hiệu vòng lặp và bản thân quá trình, v.v.
Có thể chấp nhận được việc sử dụng các giá trị gần đúng cho các hằng số khi bắt đầu triển khai dựa trên loại ứng dụng, tuy nhiên, điều này cuối cùng có thể yêu cầu một số điều chỉnh và tinh chỉnh nghiêm túc thông qua thử nghiệm thực tế, bằng cách buộc thay đổi các điểm đã đặt và sau đó quan sát phản ứng của kiểm soát hệ thống.
Cho dù là một mô hình toán học hay trong vòng lặp thực tế, cả hai đều có thể được nhìn thấy sử dụng hành động điều khiển “trực tiếp” cho các điều khoản được chỉ định. Có nghĩa là khi phát hiện ra sự gia tăng của một sai sót tích cực, một sự kiểm soát tích cực tăng lên tương ứng được bắt đầu để kiểm soát tình hình cho các điều khoản liên quan được tổng hợp lại.
Tuy nhiên, điều này có thể được yêu cầu đảo ngược trong các ứng dụng trong đó tham số đầu ra có thể có đặc tính được cấu hình đối lập cần có biện pháp sửa chữa ngược lại. Hãy xem xét ví dụ về vòng lặp dòng chảy trong đó quy trình mở van được chỉ định để hoạt động bằng cách sử dụng đầu ra 100% và 0%, nhưng cần được điều khiển với đầu ra 0% và 100% tương ứng, trong trường hợp này, điều khiển khắc phục ngược trở nên cần thiết. Để chính xác hơn, hãy xem xét hệ thống làm mát bằng nước có tính năng bảo vệ, trong đó van của nó được yêu cầu mở 100% trong thời gian mất tín hiệu. Trong trường hợp này, đầu ra của bộ điều khiển phải có thể thay đổi thành điều khiển 0% trong trường hợp không có tín hiệu, để van có thể mở ở mức hoàn toàn 100%, điều này được gọi là điều khiển 'tác động ngược'.
Mô hình toán học của chức năng điều khiển

Trong mô hình toán học này, tất cả các hằng số không âm Kp, Ki và Kd biểu thị các hệ số tương ứng cho các số hạng tỷ lệ, tích phân và đạo hàm (trong một số trường hợp, chúng còn được ký hiệu là P, I và D).
Tùy chỉnh các điều khoản kiểm soát PID
Từ các cuộc thảo luận trên, chúng tôi hiểu rằng về cơ bản hệ thống điều khiển PID hoạt động với ba tham số điều khiển, tuy nhiên một số ứng dụng nhỏ hơn có thể thích sử dụng một vài thuật ngữ này hoặc thậm chí một thuật ngữ duy nhất trong số ba thuật ngữ.
Việc tùy chỉnh được thực hiện bằng cách hiển thị thuật ngữ không sử dụng về cài đặt 0 và kết hợp một số thuật ngữ PI, PD hoặc các thuật ngữ đơn lẻ như P hoặc I. Trong số này, cấu hình bộ điều khiển PI phổ biến hơn vì thuật ngữ D thường dễ bị nhiễu. ảnh hưởng và do đó bị loại bỏ trong hầu hết các trường hợp, trừ khi bắt buộc nghiêm ngặt. Thuật ngữ I thường được bao gồm vì nó đảm bảo hệ thống đạt được giá trị mục tiêu tối ưu đã định ở đầu ra.
Trước: Cách thiết kế một công cụ chuyển đổi Flyback - Hướng dẫn toàn diện Tiếp theo: Ổn áp tự động 5 KVA đến 10 KVA - 220 Volts, 120 Volts




![Mạch phát hiện ion [Máy dò phóng điện tĩnh]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)
