Robot chọn và đặt là robot được sử dụng để nhặt một đối tượng và đặt nó vào vị trí mong muốn. Nó có thể là rô bốt hình trụ cung cấp chuyển động theo các trục ngang, dọc và quay, rô bốt hình cầu cung cấp hai chuyển động quay và một chuyển động thẳng, rô bốt khớp hoặc rô bốt scra (rô bốt cố định có cánh tay quay 3 trục thẳng đứng).
Ưu điểm
Trước khi tiến xa hơn, hãy cùng chúng tôi xem một số lý do tại sao chọn và đặt rô bốt được ưu tiên:
- Họ nhanh hơn và có thể hoàn thành công việc trong vài giây so với các đối tác của họ.
- Chúng linh hoạt và có thiết kế phù hợp.
- Chúng chính xác.
- Họ làm tăng sự an toàn của môi trường làm việc và thực sự không bao giờ cảm thấy mệt mỏi.
Các bộ phận của Robot Pick N Place

Chọn N Place Robot
Hãy để chúng tôi xem rô bốt chọn và đặt thực sự bao gồm những gì:
- Đến Rover : Là phần thân chính của robot bao gồm một số cơ thể cứng như hình trụ hoặc hình cầu, các khớp nối và liên kết. Nó còn được gọi là kẻ thao túng.
- Kết thúc nỗ lực : Là phần thân được kết nối với khớp cuối cùng của rover, được sử dụng cho mục đích kẹp hoặc xử lý đồ vật. Nó có thể là một sự tương tự với cánh tay của con người.
- Bộ truyền động : Họ là người điều khiển robot. Nó thực sự kích hoạt robot. Nó có thể là bất kỳ động cơ nào như động cơ servo, động cơ bước hoặc xi lanh khí nén hoặc thủy lực.
- Cảm biến: Chúng được sử dụng để cảm nhận trạng thái bên trong cũng như bên ngoài để đảm bảo toàn bộ robot hoạt động trơn tru. Cảm biến liên quan đến cảm biến cảm ứng, cảm biến hồng ngoại, v.v.
- Bộ điều khiển : Nó được sử dụng để điều khiển các cơ cấu chấp hành dựa trên phản hồi của cảm biến và do đó điều khiển chuyển động của từng khớp và cuối cùng là chuyển động của cơ cấu tác động cuối.
Hoạt động của một Robot Pick N Place cơ bản:
Chức năng cơ bản của một chọn và đặt robot được thực hiện bởi các khớp của nó. Các khớp tương tự như khớp của con người và được sử dụng để nối hai cơ thể cứng liên tiếp trong rô bốt. Chúng có thể là khớp quay hoặc khớp tuyến tính. Để thêm khớp vào bất kỳ liên kết nào của robot, chúng ta cần biết về bậc tự do và bậc chuyển động của bộ phận cơ thể đó. Bậc tự do thực hiện chuyển động thẳng và quay của cơ thể và Bậc chuyển động ngụ ý số trục mà cơ thể có thể di chuyển.

Robot chọn N Place đơn giản
Một robot chọn và đặt đơn giản bao gồm hai thân cứng trên một đế chuyển động, được kết nối với nhau bằng khớp quay. Khớp quay là khớp cung cấp khả năng quay 360 độ xung quanh bất kỳ trục nào.
- Đáy hoặc đế được gắn các bánh xe để chuyển động thẳng.
- Cái 1stphần thân cứng được cố định và đỡ phần thân cứng thứ hai mà bộ tác động cuối được cung cấp.
- 2ndthân cứng được cung cấp chuyển động theo cả 3 trục và có 3 bậc tự do. Nó được kết nối với 1stcơ thể với một khớp quay.
- Bộ tạo hiệu ứng cuối phải chứa tất cả 6 bậc tự do, để tiếp cận tất cả các mặt của thành phần, để đưa lên vị trí bất kỳ độ cao nào.
Nhìn chung, robot chọn và đặt cơ bản hoạt động như sau:
- Các bánh xe bên dưới đế giúp di chuyển robot đến vị trí mong muốn.
- Thân cứng đỡ đầu tác dụng uốn cong hoặc duỗi thẳng để đạt đến vị trí đặt vật thể.
- Bộ tạo hiệu ứng cuối nhấc đối tượng bằng một tay cầm chắc chắn và đặt nó vào vị trí mong muốn.
Bây giờ chúng ta đã có một ý tưởng ngắn gọn về robot chọn và đặt, câu hỏi cơ bản là nó thực sự được điều khiển như thế nào.
Một robot chọn và đặt đơn giản có thể được điều khiển bằng cách điều khiển chuyển động của bộ tạo hiệu ứng cuối của nó. Chuyển động có thể sử dụng chuyển động thủy lực, tức là sử dụng chất lỏng thủy lực dưới áp suất để dẫn động rô bốt, hoặc sử dụng chuyển động khí nén, tức là sử dụng không khí có áp suất để tạo ra chuyển động cơ học. Tuy nhiên, cách hiệu quả nhất là sử dụng động cơ để cung cấp chuyển động cần thiết. Các động cơ phải được điều khiển để cung cấp chuyển động cần thiết cho rô bốt và bộ tạo hiệu ứng cuối.
Ví dụ làm việc về điều khiển rô bốt Pick N Place
Điều khiển robot chỉ bằng một vài nút trên bàn phím thì sao? Vâng, nó có thể! Chỉ cần nhấn vào nút cần thiết, chúng ta có thể truyền lệnh cho robot để robot di chuyển theo bất kỳ hướng nào để đạt được nhiệm vụ của mình. Hơn nữa, điều này có thể đạt được bằng cách sử dụng giao tiếp không dây đơn giản.
Hãy xem cách này thực sự hoạt động như thế nào:
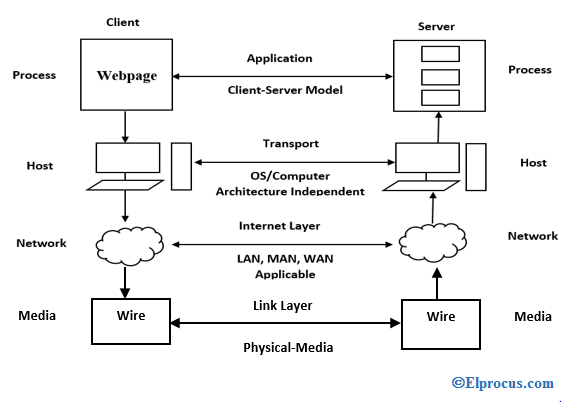
Phần máy phát bao gồm bàn phím được giao tiếp với bộ vi điều khiển. Bất kỳ số nút nào ở định dạng thập phân đều được bộ vi điều khiển chuyển đổi thành nhị phân 4 chữ số và đầu ra song song tại một trong các cổng của nó được áp dụng cho bộ mã hóa. Bộ mã hóa chuyển đổi dữ liệu song song này thành dữ liệu nối tiếp và dữ liệu này được đưa đến máy phát, được trang bị một ăng-ten để truyền dữ liệu nối tiếp.

Sơ đồ khối Hiển thị Máy phát của Robot Pick N Place
Phía thu bao gồm một bộ giải mã được giao tiếp với vi điều khiển. Bộ giải mã chuyển đổi lệnh nhận được ở dạng nối tiếp sang dạng song song và đưa dữ liệu này đến bộ vi điều khiển. Dựa trên lệnh này, bộ vi điều khiển sẽ gửi các tín hiệu đầu vào thích hợp tới trình điều khiển động cơ để điều khiển động cơ tương ứng.

Sơ đồ khối Hiển thị Người nhận của Robot Pick N Place
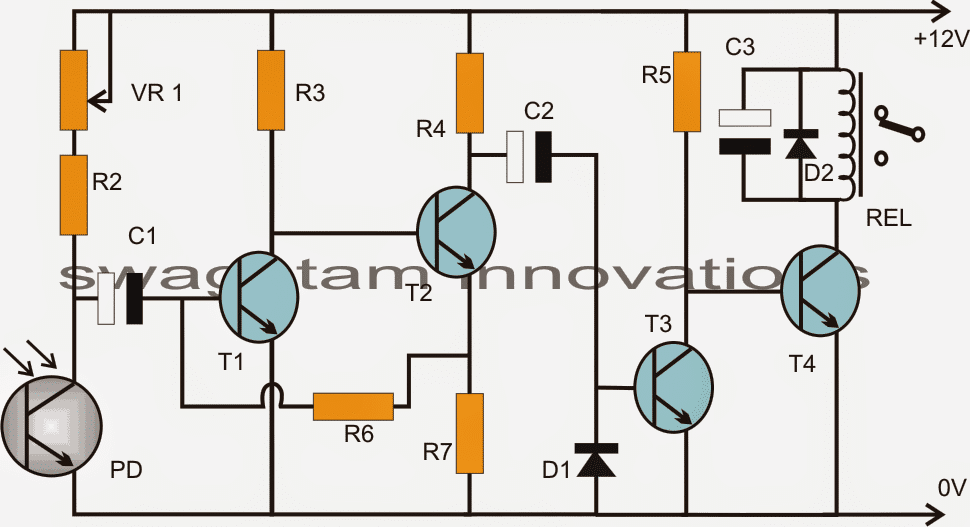
Hệ thống bao gồm hai động cơ để cung cấp chuyển động cho toàn bộ robot và hai động cơ khác để cung cấp chuyển động của cánh tay. Bộ phận tác động cuối hoặc bộ kẹp cần được điều khiển để tạo áp lực thích hợp lên đối tượng để xử lý nó một cách hiệu quả, để tạo cho nó một Grip mềm . Điều này được đảm bảo bằng cách điều khiển các động cơ cánh tay thông qua lệnh thích hợp. Đầu ra từ động cơ cánh tay được kết nối với điện trở 10Ohms / 2W và tại thời điểm động cơ quá tải hoặc điều kiện bị khóa, một điện áp cao được phát triển trên điện trở, gây ra mức logic cao ở đầu ra của bộ cảm biến quang và ngắt chân của bộ vi điều khiển được kết nối với đầu ra optoisolator thông qua một bóng bán dẫn pnp sẽ nhận được tín hiệu mức logic thấp, điều này sẽ tạm dừng tất cả các hoạt động khác của bộ kẹp.
Do đó, thông qua giao tiếp RF đơn giản, chúng tôi thực sự có thể điều khiển một robot chọn và đặt.
Các ứng dụng thực tế của Robot chọn và đặt:
- Ứng dụng Quốc phòng : Nó có thể được sử dụng để giám sát và cũng để nhặt các vật thể độc hại như bom và khuếch tán chúng một cách an toàn.
- Ứng dụng công nghiệp : Những robot này được sử dụng trong sản xuất, để lấy các bộ phận cần thiết và đặt nó vào đúng vị trí để hoàn thành bộ phận cố định máy móc. Nó cũng có thể được sử dụng để đặt các đồ vật trên băng tải cũng như nhặt các sản phẩm bị lỗi từ băng tải.
- Ứng dụng y tế : Những robot này có thể được sử dụng trong các hoạt động phẫu thuật khác nhau như trong hoạt động thay khớp, phẫu thuật chỉnh hình và nội khoa. Nó thực hiện các hoạt động với độ chính xác và chính xác hơn.
Ngoài những ứng dụng này, những robot này còn có thể được sử dụng trong nhiều ứng dụng khác phù hợp với loài người.
Bây giờ câu hỏi vẫn còn - Còn bao xa nữa là ngày mà robot sẽ hoàn toàn dễ dàng mở đường cho con người?