Bài viết thảo luận về một mạch điều khiển từ xa hồng ngoại (IR) đơn giản được định cấu hình để vận hành động cơ DC theo cách chuyển đổi được thực hiện từ thiết bị cầm tay từ xa IR tiêu chuẩn như điều khiển từ xa TV hoặc điều khiển từ xa DVD.
Động cơ được kết nối có thể được di chuyển theo hai cách và cũng có thể được dừng lại.
Mạch có thể được hiểu theo các giải thích sau:
Làm thế nào nó hoạt động
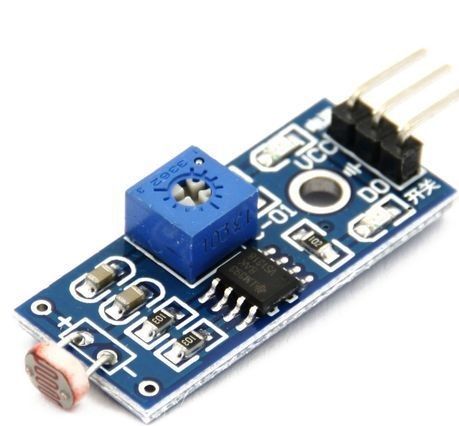
Như có thể thấy trong sơ đồ mạch nhất định, cảm biến là bất kỳ mô-đun cảm biến IR ba chân tiêu chuẩn nào thường phản hồi với bất kỳ thiết bị cầm tay từ xa IR nào của TV.
Khi một chùm tia IR (hồng ngoại) được hội tụ tại cảm biến, chân được chỉ định làm đầu ra trở nên logic ở mức thấp. Tình trạng này vẫn tồn tại miễn là chùm tia vẫn còn tập trung vào nó.
Transistor T1 là một PNP đáp ứng tín hiệu mức thấp logic này và tiến hành chuyển mạch RL1 rơ le kèm theo.
Các tiếp điểm ngay lập tức kết nối điện thế dương tức thời tại bộ thu của bóng bán dẫn với chân số 14 của IC1 được nối dây như một mạch flip flop.
Giả sử chuỗi logic ban đầu nằm ở chân số 3 của IC, trình kích hoạt ở trên sẽ dịch chuyển chuỗi sang chân số 2 của IC, làm cho nó ở mức cao.
Điều này sẽ chuyển ON T2 và rơle tương ứng RL2.
RL2 dẫn và kết nối dây cụ thể của động cơ với nguồn cung cấp âm. Vì đầu cuối khác của động cơ nhận được cực dương từ RL3, nó bắt đầu chuyển động theo hướng đã định.
Bây giờ, giả sử, cảm biến được cung cấp một kích hoạt tiếp theo thông qua thiết bị cầm tay từ xa IR, quá trình trên lặp lại và trình tự đầu ra chuyển từ chân số 2 sang chân số 4 của IC1, ngay lập tức chuyển BẬT T3 trong khi TẮT T2.
Hành động trên sẽ hoàn nguyên các kết nối rơ le buộc động cơ phải lật ngay hướng quay của nó.
Với một lần kích hoạt tiếp theo khác từ thiết bị cầm tay từ xa, trình tự bật trở lại chân số 3, không được kết nối với bất kỳ thứ gì và dẫn đến việc tắt động cơ hoàn toàn.
Việc bao gồm L1, C1 đảm bảo rằng các mạch không bị ảnh hưởng bởi sự kích hoạt giả của cảm biến.
L1 có thể được thử nghiệm để có được giá trị tối ưu sao cho nó chỉ dựa trên các tín hiệu ngẫu nhiên đi lạc bên ngoài chứ không phải tín hiệu IR thực tế từ thiết bị cầm tay điều khiển từ xa.


Danh sách bộ phận cho mạch động cơ điều khiển từ xa IR (hồng ngoại) ở trên.
R1 = 100 ôm,
R2 = 1 nghìn
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22uF
C5 = 1000uF / 25V
C6 = 0,22uF
L1 = 100mH cuộn cảm
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Tất cả các rơ le = 12V / 400 ohms / SPDT
cảm biến = TSOP1738
Động cơ = động cơ 12V Dc
Trước: Sử dụng nhiệt điện trở NTC làm bộ triệt tiêu xung đột ngột Tiếp theo: Mạch cấp nguồn 220V nhỏ gọn MJE13005