Trong bài này, chúng ta sẽ tìm hiểu về cảm biến lực dựa trên máy đo biến dạng. Chúng ta sẽ khám phá Strain Gauge là gì, Load Cell là gì, hiệu ứng nhiệt độ trên máy đo biến dạng, bù nhiệt độ với cầu Wheatstone và bộ khuếch đại Load cell HX711, và cuối cùng chúng ta sẽ tìm hiểu cách xây dựng một máy cân đo dựa trên Arduino bằng cách triển khai cảm biến lực như cảm biến trọng lượng.
Bài đăng này đề cập đến các phương pháp đo và đo trọng lượng cũng như triển khai các phương pháp trong mạch cân đo trọng lượng dựa trên Arduino.
Tất cả chúng ta đều thích nhìn thấy cân nặng của mình bất kể tuổi tác của chúng ta, một đứa trẻ nhỏ có thể thích nhìn thấy mình / cô ấy tăng cân và người lớn có thể thích nhìn thấy mình / cô ấy giảm cân. Trọng lượng là một khái niệm quan trọng từ thời cổ đại, nó giúp cho việc kinh doanh hàng hóa, phát triển các thiết bị khoa học và các sản phẩm thương mại.
Trong thời hiện đại, chúng ta đo trọng lượng bằng kilôgam, miligam thậm chí microgam cho mục đích phòng thí nghiệm. Một gam là như nhau trên toàn cầu, tất cả các thiết bị đo trọng lượng phải đo như nhau. Việc sản xuất hàng loạt một viên thuốc với liều lượng chênh lệch nhỏ vài miligam cũng đủ để biến một viên thuốc cứu mạng trở thành một viên thuốc tự tử.
Trọng lượng là gì?
Trọng lượng là lực tác dụng lên mặt phẳng. Lượng lực tác dụng tỷ lệ thuận với khối lượng của vật thể, có nghĩa là vật thể có khối lượng càng cao thì lực tác dụng càng cao.
Khối lượng là lượng vật chất có trong một vật thể.
Trọng lượng phụ thuộc vào một yếu tố nữa: Lực hấp dẫn.
Lực hấp dẫn là không đổi trên toàn cầu (Có sự thay đổi nhỏ về trọng lực do hình cầu không đồng nhất của trái đất, nhưng nó rất nhỏ). Trọng lượng 1Kg trên trái đất sẽ nặng 160 gram trên mặt trăng với cùng khối lượng, bởi vì mặt trăng có lực hút yếu hơn nhiều.
Bây giờ bạn biết trọng lượng là gì và các yếu tố làm cho một vật nặng là gì.
Máy đo độ căng là gì:
Máy đo biến dạng là một bộ chuyển đổi hoặc một cảm biến đo biến dạng (biến dạng) trên một vật thể. Điều này được phát minh bởi kỹ sư điện Edward E. Simmons và kỹ sư cơ khí Arthur Claude Ruge.
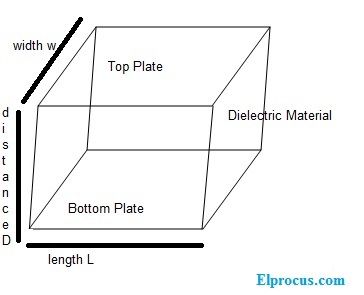
Hình minh họa của Strain Gauge:

Máy đo độ căng dẻo là một mẫu lá kim loại mỏng được kẹp giữa hai tấm nhựa mỏng và nó phải được gắn trên một bề mặt bằng keo thích hợp hoặc bất kỳ vật liệu kết dính nào.
Khi chúng ta tác dụng trọng lượng hoặc lực lên bề mặt, nó sẽ biến dạng và đồng hồ đo biến dạng cũng biến dạng. Sự biến dạng của máy đo biến dạng làm cho điện trở của lá kim loại thay đổi.
Bây giờ sự thay đổi của máy đo biến dạng trong lực cản tỷ lệ thuận với trọng lượng hoặc lực tác dụng lên bề mặt.
Trong thực tế, sự thay đổi điện trở của máy đo biến dạng là rất nhỏ để phát hiện. Để phát hiện những thay đổi nhỏ trong điện trở, chúng tôi đang sử dụng cầu Wheatstone.
Hãy cùng tìm hiểu tóm tắt về cây cầu Wheatstone.
Tìm hiểu về cây cầu Wheatstone:
Cầu đá lúa mì là một mạch có thể được sử dụng để xác định điện trở chưa biết. Cầu Wheatstone do Samuel Hunter Christie nghĩ ra, sau này cầu Wheatstone được nâng cấp và phổ biến bởi Sir Charles
Đá mì.
Hình minh họa mạch cầu Wheatstone:

Đồng hồ vạn năng kỹ thuật số hiện đại của chúng tôi có thể đọc giá trị điện trở khác nhau, từ mega ohms, kilo ohms và phạm vi ohms.
Sử dụng cầu đá lúa mì, chúng tôi có thể đo điện trở trong phạm vi mili ohm.
Cầu đá lúa mì bao gồm 4 điện trở, trong số 4 điện trở, 3 điện trở đã biết và một điện trở chưa biết.
Hiệu điện thế (hiệu điện thế) được đặt vào các điểm “A” và “C” và từ các điểm “B” và “D” một vôn kế được nối.
Nếu tất cả các điện trở bằng nhau thì không có dòng điện chạy qua các điểm “B” và “D” và vôn kế sẽ đọc số không. Đây được gọi là cầu cân bằng.
Nếu điện trở của một điện trở khác với ba điện trở khác, sẽ có dòng điện áp giữa các điểm “B” và “D” và vôn kế sẽ đọc một số giá trị tỷ lệ với điện trở chưa biết. Đây được gọi là cầu không cân bằng.
Ở đây điện trở chưa biết là máy đo biến dạng, khi điện trở thay đổi, nó phản ánh trên vôn kế.
Bây giờ, chúng tôi đã chuyển đổi một biến dạng hoặc trọng lượng hoặc lực thành tín hiệu điện áp. Điện áp này cần được khuếch đại để có được một số giá trị đọc hữu ích, điện áp này sẽ được đưa đến bộ vi điều khiển để nhận các số đọc tính bằng gam.
Bây giờ, hãy thảo luận về cách nhiệt độ ảnh hưởng đến hiệu suất của máy đo biến dạng.
Hiệu ứng nhiệt độ trên Strain Gauge:
Máy đo biến dạng nhạy cảm với nhiệt độ và nó có thể làm sai lệch kết quả đọc trọng lượng / lực thực tế. Khi có sự thay đổi nhiệt độ môi trường, lá kim loại bị giãn nở kim loại, ảnh hưởng trực tiếp đến điện trở.
Chúng ta có thể vô hiệu hóa hiệu ứng nhiệt độ bằng cầu Wheatstone. Hãy xem cách chúng ta có thể bù nhiệt độ bằng cầu Wheatstone.
Sự cân bằng nhiệt độ:
Chúng ta có thể dễ dàng trung hòa hiệu ứng nhiệt độ bằng cách thay thế tất cả các điện trở bằng máy đo biến dạng. Giờ đây, tất cả điện trở của máy đo biến dạng sẽ bị ảnh hưởng bởi nhiệt độ như nhau và tiếng ồn không mong muốn sẽ bị vô hiệu hóa bởi ký tự của cầu Wheatstone.
Load Cell là gì?
Cảm biến lực là một cấu hình nhôm với máy đo biến dạng được gắn vào 4 cạnh trong cấu hình cầu Wheatstone.
Hình minh họa cảm biến lực:

Đây là loại cảm biến lực cứng và được sử dụng phổ biến trong các ngành công nghiệp. Có 4 đầu gắn vít, một mặt được bắt vít vào bề mặt tĩnh và đầu kia được bắt vít vào giá đỡ (ví dụ như giỏ) để giữ đối tượng cần đo.
Nó có trọng lượng tối đa được chỉ định trên biểu dữ liệu hoặc trên thân của nó, vượt quá thông số kỹ thuật có thể làm hỏng cảm biến lực.
Một tế bào cầu đầy đủ bao gồm 4 đầu cuối là E +, E-, là dây kích từ mà qua đó điện áp cung cấp được áp dụng. Hai dây còn lại là S + và S- là dây tín hiệu, từ đó đo điện áp.
Giờ đây, những điện áp này nằm trong dải milivôn không đủ mạnh để bộ vi điều khiển đọc và xử lý. Chúng tôi cần khuếch đại và những thay đổi nhỏ sẽ được hiển thị cho bộ vi điều khiển. Để làm điều này, có mô-đun chuyên dụng được gọi là bộ khuếch đại cảm biến lực, hãy cùng tìm hiểu tổng quan về điều đó.
Bộ khuếch đại cảm biến lực HX711:
Hình minh họa mô-đun khuếch đại cảm biến lực HX711:

Bộ khuếch đại cảm biến lực dựa trên IC HX711 là bộ chuyển đổi tín hiệu tương tự sang kỹ thuật số 24-bit được thiết kế đặc biệt cho các phép đo trọng lượng. Nó có các mức tăng có thể lựa chọn khác nhau 32, 64 và 128 và nó hoạt động trên 2,6 đến 5,5 V.
Bảng đột phá này giúp phát hiện sự thay đổi nhỏ trên cảm biến lực. Mô-đun này yêu cầu thư viện HX711.h để hoạt động với
Arduino hoặc bất kỳ bộ vi điều khiển nào khác.
Cảm biến lực sẽ được kết nối với mô-đun HX711 và mô-đun sẽ được giao tiếp với Arduino. Mạch đo trọng lượng cần được phát triển theo cách này.
Tóm lại, bây giờ bạn đã biết máy đo biến dạng là gì, cầu Wheatstone là gì, ảnh hưởng của nhiệt độ trên máy đo biến dạng, bù nhiệt độ và bộ khuếch đại cảm biến lực là gì.
Chúng ta đã hiểu một cách toàn diện phần lý thuyết của thiết kế cân từ cuộc thảo luận ở trên, bây giờ chúng ta hãy xem cách một tế bào loas có thể được sử dụng để tạo ra một máy cân thực dụng bằng Arduino
Thiết kế máy cân kỹ thuật số bằng Arduino
Trong các bài thảo luận sau, chúng ta sẽ tìm hiểu cách chế tạo một máy cân kỹ thuật số bằng Arduino có thể đo các trọng lượng từ vài gam đến 40 Kg (tùy thuộc vào thông số kỹ thuật của cảm biến lực của bạn) với độ chính xác hợp lý. Chúng ta sẽ tìm hiểu về phân loại cảm biến lực cấp chính xác và chúng ta sẽ hiệu chỉnh mạch đề xuất và hoàn thiện máy cân.
Lưu ý: Mạch này có thể không tuân thủ các tiêu chuẩn cần thiết để triển khai thương mại.
Máy cân được sử dụng trong nhiều ngành nghề và nghiên cứu khác nhau, từ miligam đến vài tấn. Quy mô tối đa của máy cân được đề xuất phụ thuộc vào đặc điểm kỹ thuật của cảm biến lực của bạn. Có các loại từ 500 gram, 1 Kg, 5Kg, 10 Kg, 20 Kg và 40 Kg, v.v.
Có nhiều loại cảm biến lực khác nhau, chúng cung cấp phạm vi chính xác khác nhau và bạn nên chọn loại phù hợp cho dự án của mình.
Phân loại độ chính xác của cảm biến lực:
Các lớp chính xác khác nhau được xác định cho các loại ứng dụng khác nhau. Sự phân loại dưới đây là từ độ chính xác thấp nhất đến phạm vi chính xác cao nhất.
Các cảm biến lực có độ chính xác thấp hơn (nhưng chính xác hợp lý) được phân loại là D1, C1 và C2. Điều này là đủ cho dự án này. Các cảm biến lực này được sử dụng để đo trọng lượng của cát, xi măng hoặc nước.
Cảm biến lực loại C3 được sử dụng để đảm bảo chất lượng như kiểm tra trọng lượng của ổ bi, các bộ phận cấu tạo máy, v.v.
C4, C5, C6 là loại tốt nhất về độ chính xác, các loại cảm biến lực này được sử dụng để đo bằng gam đến microgam. Các lớp cấp độ này được sử dụng trong quy mô quầy hàng, giám sát sản xuất quy mô lớn, đóng gói thực phẩm và sử dụng trong phòng thí nghiệm, v.v.
Bây giờ chúng ta hãy đi sâu vào chi tiết kỹ thuật của dự án.
Sơ đồ mạch:
Kết nối cảm biến lực HX711 với Arduino và cảm biến lực.

Dự án bao gồm Arduino, Load cell và bảng mạch khuếch đại cảm biến lực HX711 và một máy tính. Đầu ra có thể được giám sát trên màn hình nối tiếp của Arduino IDE.
Bộ não của dự án luôn là arduino, bạn có thể sử dụng bất kỳ mẫu bảng Arduino nào. HX711 là ADC 24 bit, có thể tìm thấy độ uốn nhỏ nhất do trọng lượng trên cảm biến lực. Nó có thể hoạt động từ 2,7 V đến 5 V. Nguồn được cung cấp từ bảng Arduino.
Cảm biến lực nói chung có bốn dây, là đầu ra từ máy đo biến dạng được cấu hình cầu Wheatstone.
Dây đỏ là E +, dây đen là E-, dây xanh là A- và dây trắng là A +. Một số mô-đun HX711 chỉ định tên của các đầu cuối của cảm biến lực và một số mô-đun HX711 chỉ định màu sắc của dây, mô hình như vậy được minh họa trong sơ đồ mạch.
Chân DATA của HX711 được kết nối với chân số 3 của Arduino và chân Đồng hồ của HX711 được kết nối với chân số 2 của Arduino.
Cách gắn Load cell:

Cảm biến lực có bốn lỗ vít, hai lỗ ở cả hai bên. Bất kỳ một mặt nào đều phải đứng yên để có độ chính xác tốt nhất, mặt đó có thể được ghép vào một loại gỗ có trọng lượng hợp lý.
Có thể dùng một tấm gỗ mỏng hoặc tấm mỏng để giữ quả cân đo như minh họa ở trên.
Vì vậy, khi bạn đặt một quả nặng, cảm biến lực sẽ uốn cong theo máy đo biến dạng và thay đổi điện trở của nó được đo bằng mô-đun HX711 và được cấp cho Arduino.
Khi quá trình thiết lập phần cứng hoàn tất, hãy tải mã lên và hiệu chỉnh.
Hiệu chỉnh mạch:
Có hai chương trình một là chương trình hiệu chuẩn (tìm hệ số hiệu chuẩn). Một mã khác là chương trình đo trọng lượng, hệ số hiệu chuẩn được tìm thấy từ mã chương trình hiệu chuẩn cần được nhập vào chương trình đo trọng lượng.
Hệ số hiệu chuẩn xác định độ chính xác của phép đo trọng lượng.
Tải xuống thư viện HX711 tại đây: github.com/bogde/HX711
Hiệu chuẩn Mã chương trình:
//-------------------- --------------------//
#include
const int out = 3
const int clck = 2
HX711 scale(out, clck)
float CalibrationFactor = -96550
char var
void setup()
{
Serial.begin(9600)
Serial.println('------------- Weight Scale Calibration --------------')
Serial.println('Press Q,W,E,R or q,w,e,r to increase calibration factor by 10,100,1000,10000 respectively')
Serial.println('Press A,S,D,F or a,s,d,f to decrease calibration factor by 10,100,1000,10000 respectively')
Serial.println('Press 'T' or 't' for tare')
scale.set_scale()
scale.tare()
long zero_factor = scale.read_average()
Serial.print('Zero factor: ')
Serial.println(zero_factor)
}
void loop()
{
scale.set_scale(CalibrationFactor)
Serial.print('Reading: ')
Serial.print(scale.get_units(), 3)
Serial.println(' Kilogram')
Serial.print('Calibration Factor is: ')
Serial.println(CalibrationFactor)
Serial.println('--------------------------------------------')
if (Serial.available())
{
var = Serial.read()
if (var == 'q')
{
CalibrationFactor = CalibrationFactor + 10
}
else if (var == 'a')
{
CalibrationFactor = CalibrationFactor - 10
}
else if (var == 'w')
{
CalibrationFactor = CalibrationFactor + 100
}
else if (var == 's')
{
CalibrationFactor = CalibrationFactor - 100
}
else if (var == 'e')
{
CalibrationFactor = CalibrationFactor + 1000
}
else if (var == 'd')
{
CalibrationFactor = CalibrationFactor - 1000
}
else if (var == 'r')
{
CalibrationFactor = CalibrationFactor + 10000
}
else if (var == 'f')
{
CalibrationFactor = CalibrationFactor - 10000
}
else if (var == 'Q')
{
CalibrationFactor = CalibrationFactor + 10
}
else if (var == 'A')
{
CalibrationFactor = CalibrationFactor - 10
}
else if (var == 'W')
{
CalibrationFactor = CalibrationFactor + 100
}
else if (var == 'S')
{
CalibrationFactor = CalibrationFactor - 100
}
else if (var == 'E')
{
CalibrationFactor = CalibrationFactor + 1000
}
else if (var == 'D')
{
CalibrationFactor = CalibrationFactor - 1000
}
else if (var == 'R')
{
CalibrationFactor = CalibrationFactor + 10000
}
else if (var == 'F')
{
CalibrationFactor = CalibrationFactor - 10000
}
else if (var == 't')
{
scale.tare()
}
else if (var == 'T')
{
scale.tare()
}
}
}
//-------------------- --------------------//
Cách hiệu chỉnh:
- Với thiết lập phần cứng hoàn tất, hãy tải lên đoạn mã trên.
- Tháo tấm mỏng hoặc gỗ được sử dụng để giữ trọng lượng bao gồm cả hai vít (mặt còn lại của cảm biến lực phải được cố định vào đế)
- Mở màn hình nối tiếp.
- Đặt trực tiếp một trọng lượng đã biết lên cảm biến lực, 100 gram (giả sử).
- nhấn Q, W, E, R để tăng hệ số hiệu chuẩn lên 10,100,1000,10000 tương ứng.
- nhấn A, S, D, F để giảm hệ số hiệu chuẩn lần lượt là 10,100,1000,10000.
- Nhấn “Enter” sau mỗi lần tăng hoặc giảm hệ số hiệu chuẩn.
- Tăng hoặc giảm hệ số hiệu chuẩn cho đến khi xuất hiện trọng lượng chính xác của vật liệu có trọng lượng đã biết.
- Chức năng Tare là đặt thang trọng lượng về 0, điều này rất hữu ích khi bạn muốn đo trọng lượng của nước (giả sử) mà không có trọng lượng của bát. Đặt bát trước, ấn tare và đổ nước.
- Ghi lại hệ số hiệu chuẩn và ghi lại sau khi khối lượng biết trước xuất hiện.
Bây giờ nó có thể đo trọng lượng chưa biết.
Mã chương trình đo trọng lượng:
//---------------- ----------------//
#include
const int out = 3
const int clck = 2
HX711 scale(out, clck)
float CalibrationFactor = -12000 // Replace -12000 the calibration factor.
void setup()
{
Serial.begin(9600)
Serial.println('Press 'T' or 't' to tare')
scale.set_scale(CalibrationFactor)
scale.tare()
}
void loop()
{
Serial.print('Weight: ')
Serial.print(scale.get_units(), 3)
Serial.println(' Kilogram')
if (Serial.available())
{
char var = Serial.read()
if (var == 't')
{
scale.tare()
}
if (var == 'T')
{
scale.tare()
}
}
}
//---------------- ----------------//
float CalibrationFactor = -12000
Thay -12000 bằng hệ số hiệu chuẩn mà bạn tìm thấy. Nó có thể là một số âm hoặc một số dương.
Tải lên đoạn mã trên với thiết lập phần cứng đầy đủ của bạn và máy cân của bạn đã sẵn sàng.
Máy cân sử dụng màn hình LCD
Bài viết trên đã giải thích hệ thống cân dựa trên Arduino sử dụng PC của bạn, trong phần sau, chúng tôi sẽ cố gắng xây dựng phiên bản thực tế của máy cân bằng cách thêm màn hình LCD 16 x 2, để chúng tôi không phụ thuộc vào PC khi đo. trọng lượng. Trong bài này đề xuất hai phiên bản, một phiên bản có màn hình LCD 16 x 2 “I2C” và một phiên bản không có màn hình LCD 16 x 2 “I2C”.
Ở đây đưa ra hai sự lựa chọn để người đọc có thể lựa chọn thiết kế theo ý muốn của mình. Sự khác biệt chính giữa hai loại là kết nối dây với mô-đun bộ điều hợp I2C chỉ cần 4 dây (Vcc, GND, SCL và SDA) để hoạt động của màn hình LCD, trong khi nếu không có bộ điều hợp I2C, bạn cần một số dây để kết nối giữa Arduino và màn hình LCD.
Tuy nhiên, cả hai chức năng hoàn toàn giống nhau, một số thích I2C hơn một thông thường và một số thích ngược lại, vì vậy đây là cả hai thiết kế.
Chúng ta hãy xem xét thiết kế LCD thông thường:
Sơ đồ mạch:

Trong sơ đồ trên, chúng ta có arduino, màn hình LCD 16 x 2 và chiết áp 10K để điều chỉnh độ tương phản màn hình LCD.
3.3 V có thể được cấp từ Arduino đến màn hình LCD để chiếu sáng nền. Một nút nhấn được cung cấp để đưa kết quả đo trọng lượng về 0, chức năng này sẽ được giải thích chi tiết ở phần cuối.
Đây chỉ là kết nối giữa LCD và Arduino, kết nối giữa cảm biến tải và bộ khuếch đại cảm biến tải với Arduino đã được trình bày trong phần trước.
Mã cho máy cân màn hình LCD:
// -------- Program developed by R.GIRISH -------//
#include
#include
const int rs = 10
const int en = 9
const int d4 = 8
const int d5 = 7
const int d6 = 6
const int d7 = 5
LiquidCrystal lcd(rs, en, d4, d5, d6, d7)
const int out = 3
const int clck = 2
const int Tare = 4
HX711 scale(out, clck)
float CalibrationFactor = -12000 // Replace -12000 the calibration factor.
void setup()
{
lcd.begin(16, 2)
pinMode(Tare, INPUT)
digitalWrite(Tare, HIGH)
lcd.setCursor(0, 0)
lcd.print(' Weight Scale')
lcd.setCursor(0, 1)
lcd.print(' Machine')
delay(2000)
scale.set_scale(CalibrationFactor)
scale.tare()
}
void loop()
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Weight:')
lcd.print(scale.get_units(), 3)
lcd.print(' Kg')
delay(200)
if (digitalRead(Tare) == LOW)
{
scale.tare()
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Tare ......')
lcd.setCursor(0, 1)
lcd.print('Setting to 0 Kg.')
delay(1000)
}
}
// -------- Program developed by R.GIRISH -------//
Bây giờ, hãy xem cách sử dụng máy cân này với màn hình LCD dựa trên bộ chuyển đổi I2C.
Sơ đồ mạch Arduino và màn hình LCD với bộ điều hợp I2C:

Ở đây chúng ta chỉ có một màn hình Arduino và LCD với bộ điều hợp I2C ở phía sau. Bây giờ các kết nối dây được đơn giản hóa và thẳng về phía trước.
Hình minh họa mô-đun I2C:

Mô-đun này có thể được hàn trực tiếp trên mặt sau của màn hình LCD 16 x 2 hoặc thậm chí 20 x 4 bình thường và tuân theo sơ đồ.
Và một lần nữa, vui lòng tham khảo phần trước để biết kết nối của cảm biến lực, bộ khuếch đại cảm biến lực và Arduino.
Tải xuống Thư viện sau cho I2C dựa trên:
github.com/marcoschwartz/LiquidCrystal_I2C
github.com/PaulStoffregen/Wire
Mã cho mạch cân dựa trên I2C:
// -------- Program developed by R.GIRISH -------//
#include
#include
#include
const int out = 3
const int clck = 2
const int Tare = 4
HX711 scale(out, clck)
float CalibrationFactor = -12000 // Replace -12000 the calibration factor.
LiquidCrystal_I2C lcd(0x27, 16, 2)
void setup()
{
lcd.init()
lcd.backlight()
pinMode(Tare, INPUT)
digitalWrite(Tare, HIGH)
lcd.setCursor(0,0)
lcd.print(' Weight Scale')
lcd.setCursor(0,1)
lcd.print(' Machine')
delay(2000)
scale.set_scale(CalibrationFactor)
scale.tare()
}
void loop()
{
lcd.clear()
lcd.setCursor(0,0)
lcd.print('Weight:')
lcd.print(scale.get_units(), 3)
lcd.print(' Kg')
delay(200)
if (digitalRead(Tare) == LOW)
{
scale.tare()
lcd.clear()
lcd.setCursor(0,0)
lcd.print('Tare ......')
lcd.setCursor(0,1)
lcd.print('Setting to 0 Kg.')
delay(1000)
}
}
// -------- Program developed by R.GIRISH -------//
GHI CHÚ:
Bạn nên nhập hệ số hiệu chuẩn vào mã trước khi tải một trong hai mã lên Arduino.
float CalibrationFactor = -12000
Lấy hệ số hiệu chuẩn được giải thích trong một phần trước ở trên.
Chức năng Tare:
Chức năng Tare trong cân trọng lượng là đưa các kết quả đọc về không. Ví dụ, nếu chúng ta có một cái giỏ chứa hàng hóa, thì trọng lượng tịnh sẽ là trọng lượng của giỏ + trọng lượng của hàng hóa.
Nếu chúng ta nhấn nút tare với giỏ trên cảm biến lực trước khi xếp hàng hóa, trọng lượng của giỏ sẽ bị bỏ qua và chúng ta có thể đo trọng lượng của hàng hóa một mình.
Nếu bạn có bất kỳ câu hỏi nào liên quan đến mạch máy cân LCD thực tế dựa trên Arduino này, vui lòng bày tỏ trong phần bình luận, bạn có thể nhận được câu trả lời nhanh chóng.
Một cặp: Mạch công tắc tơ trạng thái rắn cho máy bơm động cơ Tiếp theo: Cách chế tạo người máy biến hình Step Down