
Cái chết là điều không thể tránh khỏi. Nhưng còn cái chết đột ngột chỉ vì một tai nạn nào đó trên đường hoặc tệ hơn nữa - một chấn thương có thể khiến cuộc sống của một người bị hủy hoại vĩnh viễn. Nó không làm bạn rùng mình, chỉ bằng cách nghĩ về nó? Nguyên nhân chính đằng sau các vụ tai nạn là gì? Tất nhiên là lái xe liều lĩnh và phóng xe, đặc biệt là trên đường trơn như trên đường cao tốc.
Theo báo cáo thống kê, trong khoảng năm 2005-2009, khoảng 1200 người chết vì tai nạn vì lái xe nông nổi. Và hơn thế nữa, bạn có thể nghe tin tức về các vụ tai nạn do lái xe hấp tấp gần như hàng ngày.
Vậy, có cách nào để ngăn chặn không? Tất nhiên!
Có thể có một số cách như lái xe thành thạo và tuân thủ luật lệ giao thông, duy trì tốc độ bình thường. Nhưng có một cách quan trọng và đó là cảnh giác tốc độ của xe và theo dõi tốc độ đó.
Điều này có thể được thực hiện bằng công nghệ bằng cách tìm ra cách để kiểm tra tốc độ của xe.
2 cách để kiểm tra tốc độ:
- Lắp đặt cảm biến tốc độ ở bên đường hoặc ở giữa đường .
- Kết hợp bộ xử lý hình ảnh video : Nó bao gồm một camera được lắp đặt trên các cột bên đường, liên tục theo dõi tình hình bằng cách chụp ảnh liên tiếp nhanh chóng của các khung hình. Các tham số lưu lượng được phân tích và xử lý tương ứng trong bộ xử lý tín hiệu.

Hình ảnh hiển thị Giám sát giao thông bằng Máy quay video
- Kết hợp RADAR trên các làn đường :RADAR có thể được sử dụng để kiểm tra tốc độ của xe bằng cách gửi tín hiệu trong dải vi ba về phía xe và phân tích sự thay đổi tần số của tín hiệu phản xạ. RADAR là viết tắt của Radio Detection and Ranging. Tín hiệu truyền đi có thể là tín hiệu có tần số không đổi hoặc tần số thay đổi. Thông thường, một CW Doppler RADAR được triển khai ở cực bên đường.

Phát hiện tốc độ bằng RADAR
- Cài đặt cảm biến IR : Cảm biến hồng ngoại với sự kết hợp của đèn LED hồng ngoại và Điốt quang có thể được sử dụng để theo dõi khoảng cách mà xe đã di chuyển và đồng thời tính toán tốc độ của nó. Ý tưởng cơ bản bao gồm việc đặt một cặp đèn LED hồng ngoại và đi-ốt quang thường xuyên, ở hai bên đường và theo dõi sự gián đoạn của đường dẫn giữa đèn LED hồng ngoại và đi-ốt quang của xe.
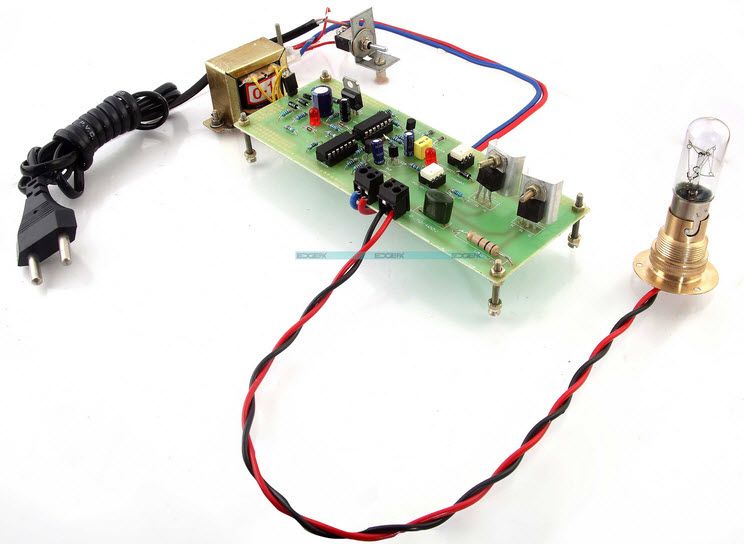
Đây là một nguyên mẫu đơn giản của phương pháp trên. Nguyên mẫu thử hoạt động với hai cặp IRLED-photodiode.

Một mạch nguyên mẫu kiểm tra tốc độ sử dụng Cảm biến IR bằng cách Bộ dụng cụ Edgefx
Nó bao gồm các phần sau:
- Một cặp điốt quang- đèn LED để cảm nhận xe
- Một bộ đếm để đếm và hiển thị thời gian thực hiện của xe để vượt qua con đường giữa hai cặp đi-ốt quang dẫn.
- Một còi để cho biết tốc độ có vượt quá giới hạn đã đặt hay không.
- Các IC hẹn giờ để cung cấp các tín hiệu tại thời điểm thích hợp.
- Sử dụng súng LIDAR : LIDAR là một hệ thống phát hiện và phân loại dựa trên LASER. Cảnh sát giao thông có thể mang theo một khẩu súng LIDAR cầm tay phát ra một chùm tia hồng ngoại ngắn và khi ánh sáng này bị phản xạ lại bởi phương tiện đang di chuyển, súng sẽ tính thời gian được thực hiện bởi tín hiệu phản xạ và được chia đôi để đo. khoảng cách. Tốc độ được đo bằng cách chia số lượng mẫu cho khoảng thời gian cố định là vài giây. Nó hoạt động tương tự như hệ thống RADAR ngoại trừ việc nó sử dụng sóng ánh sáng thay vì sóng vô tuyến.

Một khẩu súng LIDAR trong tay một cảnh sát giao thông
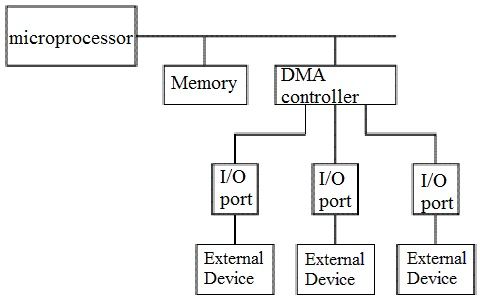
Hoạt động của Hệ thống kiểm tra tốc độ sử dụng Cảm biến IR

Sơ đồ khối hiển thị hoạt động của hệ thống kiểm tra tốc độ sử dụng cảm biến hồng ngoại bằng Bộ dụng cụ Edgefx
Khi một chiếc xe đi qua con đường giữa cặp IRLED-Điốt quang đầu tiên, nó chặn đường đi của ánh sáng và điện trở điốt quang tăng lên, gây ra tín hiệu đầu ra tương ứng ở mức thấp cho IC hẹn giờ. Bộ định thời IC1 tạo ra tín hiệu cao ở đầu ra của nó trong khoảng thời gian cố định là 10ms. Trong điều kiện bình thường, ở tốc độ bình thường, sẽ không bị gián đoạn đường đi giữa 2ndCặp đèn LED quang điốt-IR và đầu vào tương ứng với IC2 bộ định thời sẽ ở mức cao, gây ra tín hiệu logic thấp ở đầu ra của nó. Các đầu ra từ cả hai bộ định thời được kết nối với cổng NAND 2m cho ra đầu ra cao (cho đầu vào thấp và cao), kết nối với đầu vào của IC3 bộ định thời. Đầu ra tương ứng của IC hẹn giờ ở mức thấp, làm cho còi ở tình trạng tắt. Đồng thời, đầu ra từ IC bộ định thời1 được cấp cho cả hai đầu vào của cổng NAND1, đầu ra này cho đầu ra logic thấp được đưa cho bộ định thời IC4 để đưa ra đầu ra logic cao, được kết nối với chân đặt lại của bộ định thời IC5. Đầu ra của IC định thời là cao tương ứng, tạo xung cao cho IC đếm. Phần Bộ đếm bao gồm Bộ đếm thập kỷ 4 giai đoạn để đọc số đếm nhiều chữ số. Mỗi xung nhịp của IC đếm được kết nối với đầu ra xung nhịp của IC đếm trước đó. Bộ đếm tăng số đếm của nó tại mỗi cạnh lên của xung đồng hồ.
Bây giờ, giả sử chiếc xe đang di chuyển với tốc độ cao đến mức nó đạt đến con đường giữa cặp IRLED-photodiode thứ hai trong khoảng thời gian được đặt cho bộ hẹn giờ IC1. Vì vậy, bây giờ bộ đếm sẽ hiển thị số đếm thấp hơn số đếm bình thường và đồng thời, vì cổng NAND2 sẽ tăng cao ở cả hai đầu vào của nó, đầu ra của nó sẽ thấp và tương ứng bộ định thời IC3 nhận đầu vào thấp để đưa ra đầu ra logic cao và theo đó kích hoạt chuông báo động.
Do đó, khoảng cách giữa hai cặp được chia cho số đọc của bộ đếm cho biết tốc độ của xe và nếu tốc độ này tăng lên giới hạn đã cho, còi báo động sẽ cho biết rõ ràng rằng giới hạn tốc độ đã bị vi phạm.
Tôi đã đưa ra lời giải thích chi tiết về một trong những cách. Mọi cách khác đều được hoan nghênh để được đưa ra dưới dạng phản hồi.
Tín dụng Hình ảnh:
- Cảnh sát giao thông với súng LIDAR của Wikimedia








{kind=link}