Bài đăng giải thích mạch khởi động mềm động cơ PWM hiệu quả có thể được sử dụng để cho phép động cơ nặng khởi động mềm và do đó ngăn thiết bị tạo ra dòng điện cao nguy hiểm.
Tại sao nên bắt đầu nhẹ nhàng
Động cơ công suất cao như vậy động cơ bơm hoặc các dạng động cơ công nghiệp nặng khác có xu hướng tạo ra dòng điện lớn trong quá trình BẬT công tắc nguồn ban đầu của chúng, do đó tác động đến các cầu chì và công tắc liên quan gây bất lợi cho các cầu chì và công tắc này làm hỏng hoặc suy giảm thời gian làm việc. Để khắc phục tình trạng này, một mạch khởi động mềm trở nên rất bắt buộc.
Trong một số bài viết trước đây của tôi, chúng tôi đã thảo luận về một chủ đề liên quan, bạn có thể tìm hiểu một cách toàn diện thông qua các bài viết sau:
Mạch khởi động mềm cho động cơ bơm
Mạch khởi động mềm cho tủ lạnh
Mặc dù các thiết kế trên khá hữu ích, nhưng đây có thể được coi là công nghệ hơi thấp với cách tiếp cận của họ.
Trong bài viết này, chúng ta sẽ xem quy trình có thể được thực hiện như thế nào bằng cách sử dụng Động cơ dựa trên PWM mạch điều khiển khởi động mềm.
Sử dụng khái niệm PWM
Ý tưởng ở đây là áp dụng PWM tăng dần cho động cơ mỗi khi nó được BẬT, hành động này cho phép động cơ đạt được tốc độ tăng tuyến tính từ 0 đến tối đa trong một khoảng thời gian quy định, có thể điều chỉnh được.

Lưu ý: Vui lòng sử dụng cấu hình Darlington BC547 tại chân số 5 của IC2 thay vì một BC547 duy nhất. Điều này sẽ tạo ra phản ứng hiệu quả hơn so với BC547 đơn lẻ
Mạch ví dụ cho bộ điều khiển động cơ 48V biến thiên với khởi động mềm

## VUI LÒNG KẾT NỐI 1K TỪ PIN5 CỦA IC2 ĐỂ PHÁT TRIỂN, MÀ KHÔNG ĐƯỢC HIỂN THỊ TRONG THIẾT KẾ TRÊN ##
Làm thế nào nó hoạt động
Tham khảo hình trên, việc sản xuất PWM tăng dần tuyến tính đạt được với sự trợ giúp của hai IC 555, được cấu hình ở chế độ PWM tiêu chuẩn của chúng.
Tôi đã thảo luận tỉ mỉ về khái niệm này trong một trong những bài viết trước đây của tôi giải thích cách sử dụng IC 555 để tạo PWM.
Như có thể được chứng kiến trong sơ đồ, cấu hình sử dụng hai IC 555, IC1 được nối dây như một bộ ổn định, trong khi IC2 như một bộ so sánh.
IC1 tạo ra các tín hiệu xung nhịp cần thiết ở một tần số nhất định (được xác định bởi các giá trị của R1 và C2) được áp dụng cho chân số 2 của IC2.
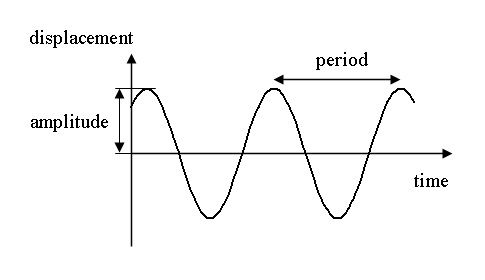
IC2 sử dụng tín hiệu đồng hồ để tạo ra các sóng tam giác trên chân số 7 của nó, để các sóng này có thể được so sánh với điện thế có sẵn tại chân điện áp điều khiển số 5 của nó.
Chân số 5 nhận điện áp điều khiển cần thiết thông qua NPN giai đoạn theo dõi emitter được thực hiện với sự trợ giúp của T2 và các thành phần liên quan.
Khi nguồn được BẬT, T2 được cung cấp điện áp tăng dần hoặc tăng dần ở gốc của nó thông qua R9 và do sạc tương ứng của C5.
Điện thế tăng dần này được nhân đôi một cách thích hợp trên bộ phát T2 đối với điện áp cung cấp tại bộ thu của nó, có nghĩa là dữ liệu cơ sở được chuyển đổi thành điện thế tăng dần từ 0 đến gần như mức điện áp cung cấp.
Điện áp dốc này tại chân số 5 của IC 2 được so sánh ngay lập tức với sóng tam giác có sẵn trên chân số 7 của IC2, được dịch thành PWM tăng tuyến tính tại chân số 3 của IC2.
Quá trình tăng tuyến tính của PWM tiếp tục cho đến khi C5 được sạc đầy và cơ sở của T2 đạt được mức điện áp ổn định.
Thiết kế trên quan tâm đến việc tạo PWM mỗi khi BẬT nguồn.
Đoạn ghi hình:
Video sau đây cho thấy một kết quả thử nghiệm thực tế của mạch PWM trên được thực hiện trên động cơ một chiều 24V. Video hiển thị phản ứng điều chỉnh nồi PWM của mạch trên động cơ và cũng có phản ứng LED chỉ báo pin bổ sung trong khi động cơ được BẬT và TẮT .
Tích hợp Bộ điều khiển Triac cắt ngang 0
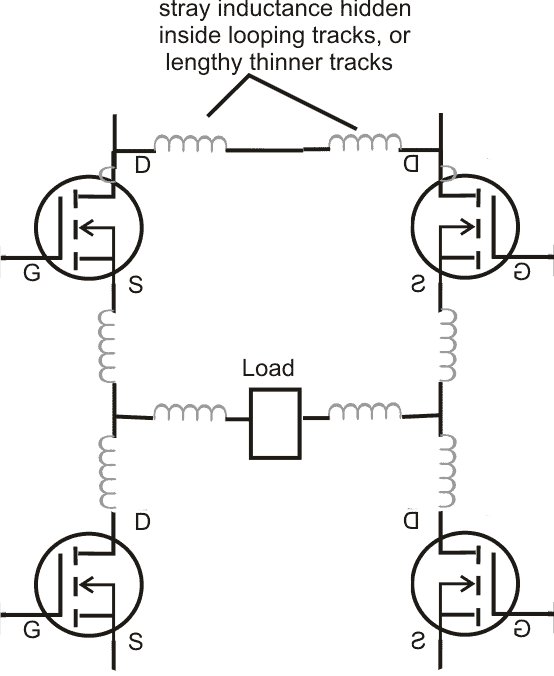
Để thực hiện động cơ PWM hiệu ứng mạch khởi động mềm , đầu ra từ chân số 3 của IC2 được yêu cầu cấp cho mạch trình điều khiển nguồn triac, như hình dưới đây:

Hình ảnh trên cho thấy cách điều khiển PWM khởi động mềm BẬT có thể được thực hiện trên các động cơ hạng nặng cho mục đích đã định.
Trong hình trên, chúng ta thấy cách sử dụng bộ cách ly trình điều khiển triac với bộ phát hiện vạch ngang 0 để điều khiển động cơ với PWM tăng dần tuyến tính để thực hiện hiệu ứng khởi động mềm.
Khái niệm trên xử lý hiệu quả tình trạng quá dòng khởi động BẬT trên động cơ một pha.
Tuy nhiên, trong trường hợp sử dụng động cơ 3 pha, ý tưởng sau có thể được sử dụng để thực hiện đề xuất khởi động mềm 3 pha trên động cơ.

Trước: Đèn báo LED lên / xuống sử dụng LM3915 Tiếp theo: Cách tạo mạch ngăn tiếng chó sủa bằng cách sử dụng tần số cao