Bài đăng giải thích một mạch điều khiển động cơ điều khiển bằng tia laser dòng đơn giản, hoạt động bằng cách đáp ứng với một đường tia laser ngang chính xác, được tạo ra từ thiết bị đo mức laser đường thẳng và tự động điều chỉnh căn chỉnh của công cụ được kết nối hoặc công việc với độ chính xác và hoàn hảo cao.
Laser dòng là gì
Thiết bị laser dòng là một thiết bị thay thế điện tử có độ chính xác cao của bộ chỉnh mức độ linh hồn tuổi già của thợ mộc.
Thiết bị laser vạch thực sự là một thiết bị phát tia laser tiên tiến có thể tạo ra 360 ° Đường laser chiếu sáng ngang có độ chính xác cao, để cung cấp tham chiếu hiệu chuẩn cho tất cả các công việc kỹ thuật xây dựng hoặc công nghiệp, để kết quả cuối cùng của công việc là hoàn toàn thẳng hàng và không có một chút sai sót.
Mạch được yêu cầu bởi một trong những độc giả tận tâm của blog này, ông Rafal.
Các cuộc thảo luận chi tiết liên quan đến quy trình làm việc của động cơ điều khiển bằng laser dòng có thể được học từ các đoạn sau:
Mục tiêu thiết kế
Ông. Rafal: Tôi rất mới với điều này. Tôi đã thực hiện một số nghiên cứu trong vài tuần qua và không tìm thấy chính xác những gì tôi cần.
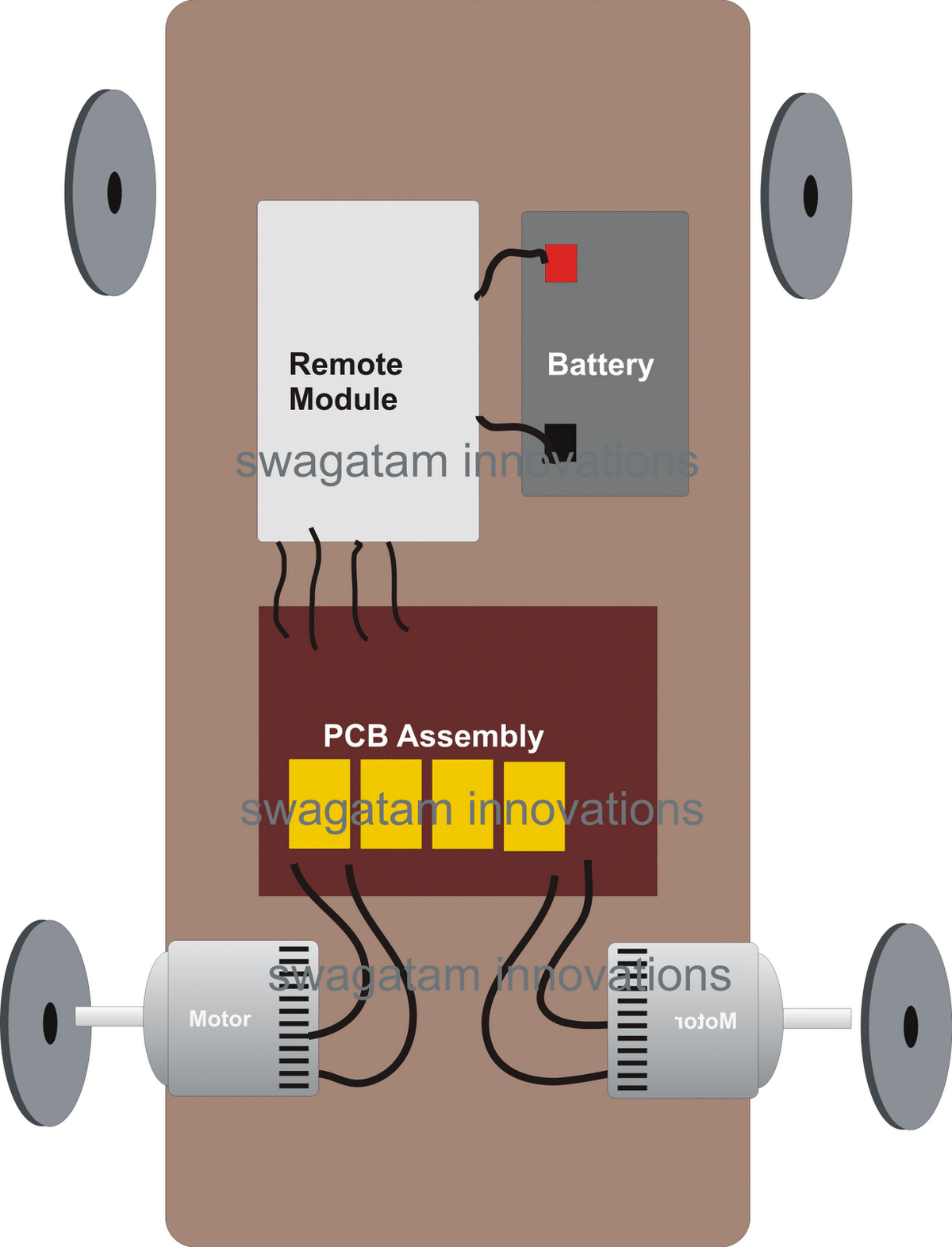
Tôi sẽ biết ơn vì bất kỳ sự giúp đỡ nào. Tôi đính kèm một bức ảnh về ý tưởng của tôi. Tôi muốn điều khiển hai động cơ DC 12 V với mức laze.
Mức laser dòng sẽ báo hiệu cho máy thu.

Tín hiệu này sau đó sẽ phải điều khiển hướng của động cơ DC 12 V. Động cơ quay thanh ren qua lại để điều chỉnh chiều cao của dụng cụ.
Từ những gì tôi phát hiện, sẽ có một số điốt quang được kết nối song song, một bộ để phát hiện tia laser trên mức 0 và một bộ khác dưới mức đó. Mức null chỉ là một số loại tạm dừng giữa các điốt quang để giữ cho hệ thống không hoạt động. Cảm biến laser không có màn hình. Tôi chỉ đưa ra một bức ảnh minh họa.
Tôi cần một mạch cầu H, nhưng tất cả những gì tôi tìm thấy đều được sử dụng với hệ thống Arduino. Nếu cần, tôi có thể mua một cây cầu làm sẵn với giá hợp lý lên đến $ 30
Lý tưởng nhất là điều này sẽ hoạt động với cả laser đỏ và xanh lục, nhưng các bước sóng khác nhau đến mức tôi nghi ngờ nó có thể được thực hiện và nó sẽ không hoạt động trên toàn bộ quang phổ ánh sáng.
Ban đầu, tôi muốn thiết lập mức của chùm tia này gắn vào động cơ bằng các nút lên xuống. Tôi sẽ rất vui nếu động cơ thứ hai sau đó sẽ tự điều chỉnh bằng con quay hồi chuyển trong khi thiết lập nó, nhưng nếu không có Arduino thì điều đó có thể rất khó khăn.
Tôi cảm thấy những gì tôi đang cố gắng làm rất đơn giản mà tôi có thể thực hiện mà không cần sử dụng Arduino. Và tôi nhấn mạnh vào một thiết bị tương tự, do điều kiện khó khăn tại một công trường và dường như với tôi rằng càng nhiều thiết bị điện tử, thiết bị càng không đáng tin cậy.
Nó sẽ chỉ hoạt động trong nhà và khoảng cách laser tối đa là 10m. Động cơ tôi tìm thấy ở đầu có mức tiêu thụ hiện tại lớn 200mA tối đa 2,19 A, nhưng cũng có mô-men xoắn lớn.
Nguồn 18 V DC từ pin Makita.
Cảm ơn trước cho các đề nghị.
Lời chào từ Ba Lan
Rafal
Swag : Tôi có một sự nhầm lẫn về hoạt động của trục động cơ. Vít ren trên cả hai động cơ sẽ đẩy dụng cụ, nhưng nó không thể kéo nó trở lại? Làm thế nào để điều đó diễn ra?
Có thể thực hiện tương tự với một động cơ duy nhất không?
Ông. Rafal: Độ thẳng phẳng thấp hơn có lẽ sẽ là 70 cm, chỉ dành cho các phòng nhỏ, ví dụ: nhà vệ sinh để bạn có thể vào bằng cửa.
Máy không có truyền động, côn tay, chỉ san gạt thẳng hàng. Trong video, hai vật thể màu vàng trên cột buồm là máy dò laze được gắn chặt vào các thanh thẳng.
Tia laser đang đứng ở một nơi xa hơn và nó tạo ra một đường ngang.
Các động cơ sẽ được gắn vào một xe đẩy và vít ren để cân bằng các đoạn thẳng bằng máy dò laze. Phải có hai động cơ để cân bằng hai bên, nhưng đó là hình ảnh phản chiếu.
Phần chung duy nhất sẽ là một cầu H hai kênh như thể tôi đang làm nó từ một mô-đun làm sẵn và có thể là một con quay hồi chuyển, nhưng đó là một giấc mơ :).
Điều quan trọng là phải có nút cho vòng quay động cơ trái và phải.
Thủ tục là thế này. Ví dụ, tôi treo laser cao hơn 2 m so với mặt sàn được chỉ định. Tôi đo ra 2 mét từ tia laze đến mép dưới của các đường thẳng.
Tôi điều chỉnh các nút nhấn chiều cao, các nút chuyển từ phải sang trái sao cho nó bằng 2 mét so với cạnh dưới cùng của đường thẳng. Tôi đặt các máy dò trên cột buồm để chùm tia laser ở mức 0 giữa các phần điốt quang. Và phần còn lại sẽ tự làm
Trong tệp đính kèm, tôi đặt một bản vẽ hoạt động của máy dò.
Rafal
Thiết kế mạch

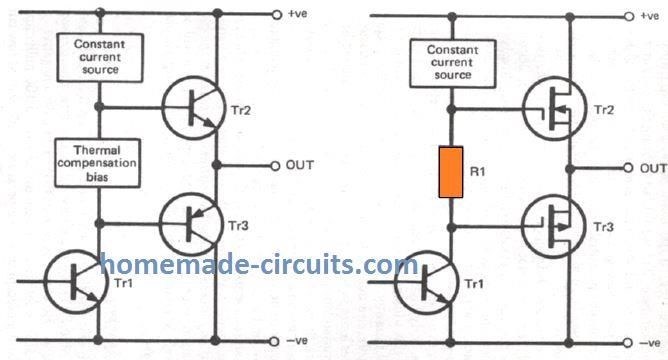
Nhìn vào hình trên, hai giai đoạn mạch giống hệt nhau như vậy sẽ được yêu cầu để phát hiện và hiệu chỉnh công cụ điều khiển động cơ liên quan đối với độ chính xác về độ thẳng của đường laser.
Hai giai đoạn giống hệt nhau là hình ảnh phản chiếu của nhau như hình dưới đây:

Mạch khá đơn giản. Nó hoạt động với một bộ so sánh cửa sổ đảm bảo rằng các động cơ truyền động không hoạt động miễn là cặp LDR được tiếp xúc với độ sáng vạch laser giống hệt nhau.
Một nửa điện áp cung cấp sau đó được tạo ra trên đầu vào không đảo của A1 và đến đầu vào không đảo của A2.
Ngay khi phát hiện thấy sự lệch hướng trong đường laser (có thể xảy ra nếu công cụ điều khiển động cơ không được căn chỉnh thẳng hàng), độ sáng tác động đến LDR R1 và R2 sẽ thay đổi.
Trong tình huống này, điện áp đầu vào cho bộ so sánh cửa sổ lệch khỏi một nửa điện áp cung cấp. Tình huống này khiến đầu ra của bộ so sánh ra lệnh cho mạng cầu động cơ di chuyển động cơ theo chiều kim đồng hồ hoặc ngược chiều kim đồng hồ.
Bóng bán dẫn T1. . . T4 được cấu hình giống như một mạng cầu nối để cho phép chuyển đổi động cơ trong hướng về phía trước và ngược lại tùy thuộc vào độ chiếu sáng LDR hoặc góc lệch vạch laser.
Điốt D1. . . D4 được đặt để loại bỏ các cực đại điện áp được tạo ra trong thời gian động cơ hoạt động và hoạt động. Chức năng của chiết áp đặt trước P1 và P2 là để tạo điều kiện thuận lợi cho việc điều chỉnh căn chỉnh.
Chúng được tinh chỉnh để đảm bảo động cơ được tắt hoàn toàn và không hoạt động miễn là cặp LDR liên quan được tiếp xúc với cùng độ sáng đèn laser.
Ví dụ: do căn chỉnh không chính xác của công cụ điều khiển động cơ, độ nghiêng của đường laser làm cho ánh sáng trên LDR R2 giảm hơn LDR R1. Điều này sẽ dẫn đến điện áp tại điểm A tăng trên một nửa điện áp nguồn.
Trong tình huống này, đầu ra op amp A1 trở nên cao, buộc các bóng bán dẫn T1 và T4 phải hoạt động. Điều này sẽ làm cho động cơ quay theo hướng có liên quan. Thao tác này sẽ tự động dịch chuyển công cụ được kết nối theo một đường thẳng cho đến khi độ chính xác căn chỉnh ngang của nó trùng với độ chính xác của đường laser.
Ngược lại, nếu chúng ta giả sử dụng cụ được nghiêng với hướng ngược lại sao cho sự chiếu sáng của các LDR ngược lại với những gì đã thảo luận ở trên, sẽ làm cho điện áp tại điểm A giảm xuống dưới một nửa điện áp nguồn. Điều kiện này kích hoạt amp op đầu ra A2 tăng cao để T3 và T2 hoạt động.
Điều này dẫn đến động cơ hiện đang chạy theo hướng ngược lại, trong nỗ lực điều chỉnh sự căn chỉnh của dụng cụ theo hướng có liên quan cho đến khi nó trở nên hoàn toàn thẳng trùng với độ chính xác ngang của đường laser.
Nút Lên / Xuống
Các nút lên xuống để đặt trước độ cao ban đầu của mức tinh thần có thể được thực hiện đơn giản bằng cách đấu dây các công tắc nút nhấn song song với mỗi LDR.
Cài đặt LDR
Để nhận được phản hồi chính xác từ LDR, các cặp bên trái bên phải phải được lắp đặt bên trong một ống giống như vỏ bọc để chúng chỉ có thể 'nhìn thấy' ánh sáng laser chứ không phải bất kỳ ánh sáng xung quanh nào khác.
Ý tưởng có thể được chứng kiến qua hình ảnh sau:

Ở đây, chúng ta có thể thấy rằng các LDR được đặt rất gần nhau, điều này đảm bảo rằng khi vạch laser nằm ở trung tâm chính xác, một số phần của cả hai cặp LDR được ánh sáng laser chiếu sáng đồng nhất.
Mặt trước của vỏ LDR có thể được bao phủ bằng một thấu kính khuếch tán, để ánh sáng laser có thể được khuếch tán bên trong qua các LDR tương ứng một cách đồng nhất.
Một cặp: Mạch báo động chống trộm đơn giản để bảo vệ các vật có giá trị Tiếp theo: Universal BJT, JFET, MOSFET Tester Circuit