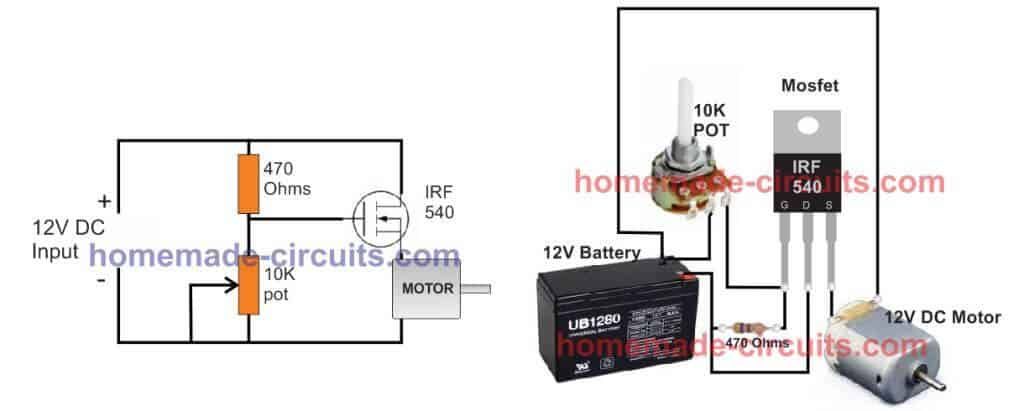
Bài đăng giải thích bộ điều khiển Động cơ DC có tính năng bù mô-men xoắn không đổi để cho phép động cơ chạy ở tốc độ phù hợp bất kể tải trên nó.
Hạn chế của bộ điều khiển tốc độ thông thường
Một nhược điểm của phần lớn bộ điều khiển tốc độ đơn giản là chúng chỉ cung cấp cho động cơ một điện áp không đổi xác định trước. Kết quả là tốc độ không không đổi và thay đổi theo tải trên động cơ, do không có bù mô-men xoắn.
Ví dụ trong một đoàn tàu mô hình, với các bộ điều khiển đơn giản, tốc độ của đoàn tàu giảm dần đối với các dốc leo và tăng tốc khi xuống dốc.
Do đó, đối với mô hình đào tạo, việc điều chỉnh điều khiển nồi để duy trì tốc độ động cơ đã chọn cũng sẽ sai lệch tùy thuộc vào tải mà động cơ có thể kéo.
Mạch điều khiển tốc độ động cơ mô-men xoắn không đổi được giải thích trong bài viết này sẽ giải quyết vấn đề này bằng cách theo dõi tốc độ động cơ và duy trì nó không đổi cho cài đặt điều khiển định trước, bất kể tải có thể là gì trên động cơ.
Mạch có thể được áp dụng trong hầu hết các mô hình sử dụng động cơ nam châm vĩnh cửu DC.
Tính hệ số EMF trở lại
Điện áp trên các cực của động cơ bao gồm một số yếu tố, điện áp sau e.m.f. do động cơ tạo ra, và điện áp giảm trên điện trở phần ứng.
Mặt sau e.m.f. được tạo ra bởi cuộn dây động cơ thường tỷ lệ với tốc độ động cơ, có nghĩa là tốc độ động cơ có thể được theo dõi bằng cách đo nội dung emf trở lại này. Tuy nhiên, vấn đề chính là phải cô lập và phát hiện ra phía sau e.m.f. từ điện áp điện trở phần ứng.
Khi đó, giả sử một điện trở riêng được mắc nối tiếp với động cơ, coi như một dòng điện chung đi qua điện trở này và cũng qua điện trở phần ứng, điện áp rơi trên hai điện trở nối tiếp cũng có thể tương đương với sụt trên điện trở phần ứng.
Trên thực tế, có thể giả định rằng khi hai giá trị điện trở này giống nhau thì cường độ điện áp hai điện trở trên mỗi điện trở cũng sẽ tương tự. Với dữ liệu này, có thể loại trừ điện áp rơi của R3 khỏi điện áp động cơ và nhận lại giá trị e.m.f yêu cầu cho quá trình xử lý.

Xử lý EMF trở lại cho mô-men xoắn không đổi
Mạch đề xuất liên tục giám sát mặt sau e.m.f. và theo đó điều chỉnh dòng điện của động cơ để đảm bảo rằng, đối với cài đặt điều khiển nồi được chỉ định, điện áp ngược, cùng với tốc độ động cơ được duy trì ở một mô-men xoắn không đổi.
Để có thể mô tả mạch dễ dàng hơn, người ta coi P2 được điều chỉnh và giữ ở vị trí trung tâm của nó và điện trở R3 được chọn tương đương với giá trị điện trở của phần ứng động cơ.
Tính toán điện áp động cơ
Điện áp động cơ có thể được tính bằng cách thêm e.m.f trở lại. Va với điện áp rơi trên điện trở trong của động cơ Vr.
Coi R3 giảm một điện áp V, điện áp ra Vo sẽ bằng Va + 2 V.
Điện áp tại đầu vào nghịch đảo (-) của IC1 sẽ là Va + Vr và ở đầu vào không đảo (+) sẽ là Vi + (Va + 2Vr - Vi) / 2
Vì hai cường độ điện áp trên được cho là bằng nhau, nên ta tổ chức phương trình trên là:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Đơn giản hóa phương trình này cung cấp Va = Vi.
Phương trình trên chỉ ra rằng mặt sau e.m.f. của động cơ luôn được giữ ở cùng mức với điện áp điều khiển. Điều này cho phép động cơ làm việc với tốc độ và mômen không đổi đối với bất kỳ cài đặt điều chỉnh tốc độ P1 được chỉ định nào.
P2 được đưa vào để bù mức chênh lệch có thể tồn tại giữa điện trở R3 và điện trở phần ứng. Nó thực hiện điều này bằng cách điều chỉnh độ lớn của phản hồi tích cực trên op amp đầu vào không đảo ngược.
Op amp LM3140 về cơ bản so sánh điện áp phát triển trên phần ứng động cơ với điện áp tương đương emf phía sau trên động cơ và điều chỉnh điện thế cơ bản của T1 2N3055.
T1 được định cấu hình như một người theo dõi emitter điều chỉnh tốc độ của động cơ phù hợp với thế năng cơ bản của nó. Nó làm tăng điện áp trên động cơ khi bộ khuếch đại op phát hiện có emf trở lại cao hơn, dẫn đến tăng tốc độ động cơ và ngược lại.
T1 nên được gắn trên một bộ tản nhiệt phù hợp để hoạt động tốt.
Cách thiết lập mạch
Việc thiết lập mạch điều khiển tốc độ động cơ mômen không đổi được thực hiện bằng cách điều chỉnh P2 với động cơ có tải thay đổi cho đến khi động cơ đạt được mômen không đổi bất kể điều kiện tải.
Khi mạch được áp dụng cho các đoàn tàu mô hình, phải chú ý không quay P2 quá nhiều về phía P1 có thể dẫn đến việc chạy tàu mô hình chậm lại và ngược lại P2 không được quay quá nhiều theo hướng ngược lại, điều này có thể dẫn đến tốc độ tàu thực sự nhanh hơn khi leo dốc lên dốc.
Một cặp: Đã khám phá các mạch sạc pin Ni-Cd đơn giản Tiếp theo: Mạch thu phát mini